о;: о сд
со О)
и далее через антенный коммутатор 6 на антенну-зонд 7. Регистрируют на детекторе 9 и в блоке 10 определяют интервал времени меяду сигналами запуска модулятора 3 и выходным сигналом детектора 9. Сигнал на модулятор
3 поступает через формирователь 1 и блок переменной задержки 2, в котором корректируют задержку последних излучаемых сигналов по разнице величин двух измеренных интервалов. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ КОНТРОЛЯ ФОРМЫ ОТРАЖАЮЩЕЙ ПОВЕРХНОСТИ АНТЕННЫ | 1989 |
|
RU1637539C |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 2017 |
|
RU2662642C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ВИБРАЦИИ КОРПУСА СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352909C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2013 |
|
RU2529867C2 |
Изобретение относится к измерительной технике и позволяет компенсировать систематическую погрешность измерения, обусловленную нестабильностью параметров приемопередающего тракта в системах синхронизации шкал времени. Сигнал точного времени,излучают рабочим пунктом и принимают эталонным пунктом, на котором перед переизлучением его задерживают на интервал времени, равный удвоеиному интервалу от принятого сигнала до ближайшей отметки эталонной шкалы. Переизлученный сигнал, принятый на рабочем пункте, отстоит от ближайшей отметки рабочей шкалы на интервал времени, ,равньй1 удвоенному расхождению шкал. На обоих пунктах вводят дополнительную задержку излучаемых сигналов точного времени, которую периодически корректируют в режиме калибровки. Режим калибровки выполняется в два этапа, Первьй этап - сигнал с модулятора 3 подают через переключатель 4 на детектор 9 и на приемник 8 через антенну-зонд 7. В вычислительном блоке 10 измеряют интервал времени между выходными сигналами детектора 9 и приемника 8. Второй этап - .сигнал с блока 3 через переключатель 4 nocTvnaeT на усилитель мощности 5 (О (Л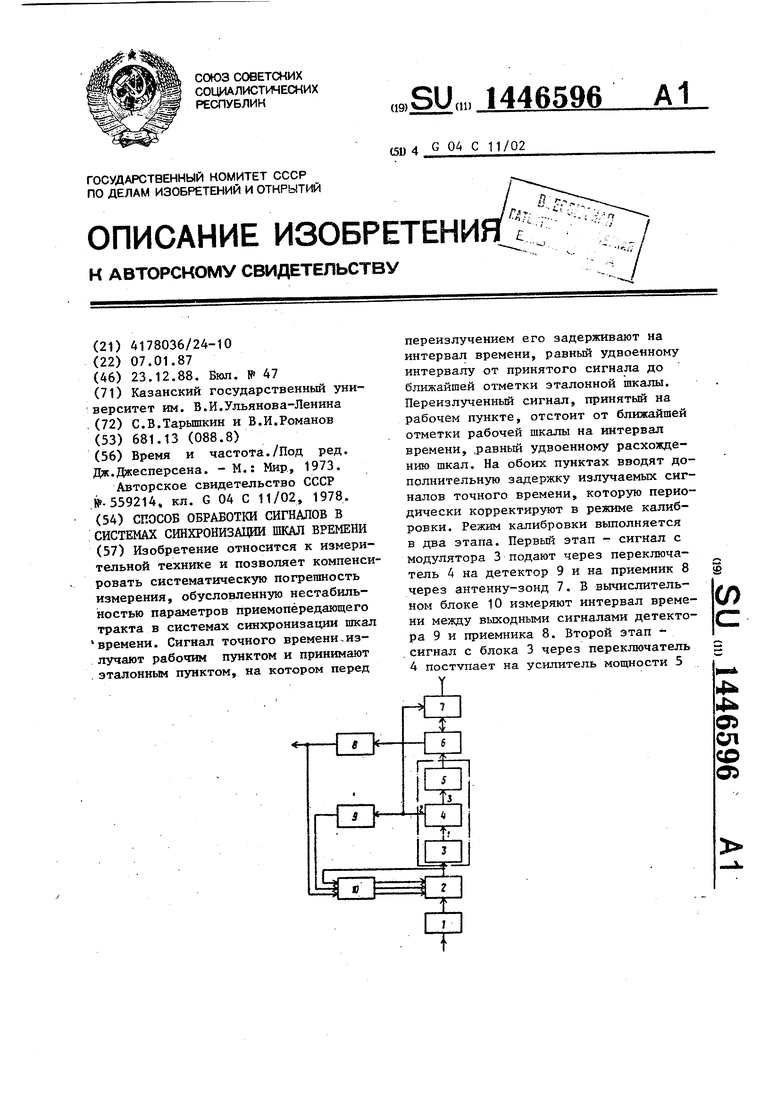
1
Изобретение относится к области организации измерений и обработке сигналов в комплексах синхронизации шкал времени и может быть использо- вано при привязке шкалы рабочих iia- сов к шкале времени образцовых часов
Цель изобретения - компенсация систематической погрешности измерений обусловленной нестабипьностью парамет)ров приемопередающего тракта.
Согласно способу компенсации систематической погрешности измерение задержки передаю1цего устройства производится в штатном режиме его рабо- тЫу при этом измеренное значение рас хоязденйя шкал при компенсации систематической ошибки зависит от нестабильности параметров только одного элемента - детектора, используемого при измерениях задержек приемного и передающего устройств, что повышает точность привязки шкал времени.
На чертеже представлена схема устройства, реализующего предлагаемый способ.
Устройство содержит формирователь 1, блок 2 переменной задержки, модулятор 3, переключатель 4, усилитель 5 мощности, антенный коммутатор 6, антенну-зонд 7, приемное устройство 8, детектор 9 и вычислительный блок 10.
Режим калибровки включается периодически через интервал времени - BpeMJi, за которое параметры приемо- переданщего тракта практически не изменяются. Так как нестабильность его параметров зависит от колебаний температуры окружающей среды, то Т имеет значение до 10 мин.
Команду на включение режима калибровки подает вычислительный блок 10, По этой команде переключатель 4 устанавливают в положение 1-2. Видеоимпульс точного времени поступает на вход формирователя 1, вырабатывакяцего видеосигнал с заданными параметрами
(например, кодовую последовательность) . Сформированный видеосигнал поступает на модулятор 3, который переносит его на рабочую частоту при- емопередакяцего тракта. Модулятор 3
является первым каскадом передающего устройства. В положении 1-2 переключателя 4 сигнал проходит на вход детектора 9 и на антенну-зонд 7, расположенную сразу после антенного коммутатора 6 на начальном участке ан- тенно-фидерного устройства (АФУ). Сигнал с антенны-зонда 7 наводится на АФУ и попадает на вход приемника 8. Антенный коммутатор 6 предназначен для совместной работы приемника и передатчика на общее АФУ. Вычислительный блок 10 определяет величину интервала t - t :
t,+ tj+ tg; ti+ t,+ t,; t,+ ц+ tg- t,, время задержки i-го блока.
По команде из вычислительного блока 10 переключатель 4 переводят в
35 положение 1-3. Сигнал с модулятора 3 поступает на усилитель 5 мощности. Передающее устройство работает в штатном режиме. Излучаемый сигнал калибровки передатчика через антен40 ну-зонд поступает на детектор 9. Вычислительный блок 10 измеряет интервал времени t t,+ tj+ t« TOT же блок 10 определяет интервал
45 -г:
t - t tg- (t,-b t5) - 2t.
Ч
Так как t
ет , то 1 - о, Значеш1е интервала
Ц+ t.
;.pt
- 2сает
Pi g записывают
в блок 2 переменной задержки. Режим калибровки выключают. С этого момента сигналы точного времени, излучаемые передающим устройством, задерживаются на величину Z . Измеренное расхождение шкал пунктов А и Б равно
2ut - 2(t - )&
-|ет
Формула изобретения
Способ обработки сигналов в системах синхронизации шкал времени, при котором используют равенство времени распространения радиоволн в прострай- стве мезвду антеннами в прямом и обратном направлениях, при котором сигнал точного времени излучают рабочим пунктом и принимают эталонньм пзжк- том, на котором перед переизлучением его задерживают на интервал времени, равный удвоенному интервалу от принятого сигнала до ближайшей отметки эталонной шкал, при этом переизлученный сигнал, принятый на рабочем пункте, отстоит от ближайшей отметки рабочей mKaJBd на интервал времени.
равный удвоенному расхояодению шкал, отличающийся тем, что, с целью исключения систематической погрешности измерения, обусловленной нестабильностью параметров приемопередающих трактов, на обоих пунктах вводят дополнительную задержку излучаемых сигналов точного времени, ко.торую периодически корректируют в режиме калибровки, выполняемом в два этапа, причем на первом этапе измерительный сигнал с модулятора подают через переключатель как на
детектор, так и на приемник через антенну-зонд, и в вычислительном блоке измеряют интервал времени между выходными сигналами детектора и приемника, на втором этапе сигнал
с модулятора при другом положении переключателя подают на усилитель мощности передатчика, принимают на антенну-зонд, регистрируют на детекторе и в вычислительном блоке определяют интервал времени между сигналами запуска модулятора и выходным сигналом детектора, а затем по разнице величин двух измеренньк интервалов времени корректируют за
держку последующих излучаемых сигналов точного времени.
| Бремя и частота./Под ред | |||
| Дж.Джесперсена | |||
| -М.: Мир, 1973 | |||
| Способ обработки сигналов для синхронизации шкал времени | 1975 |
|
SU559214A1 |
| кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
