i (Л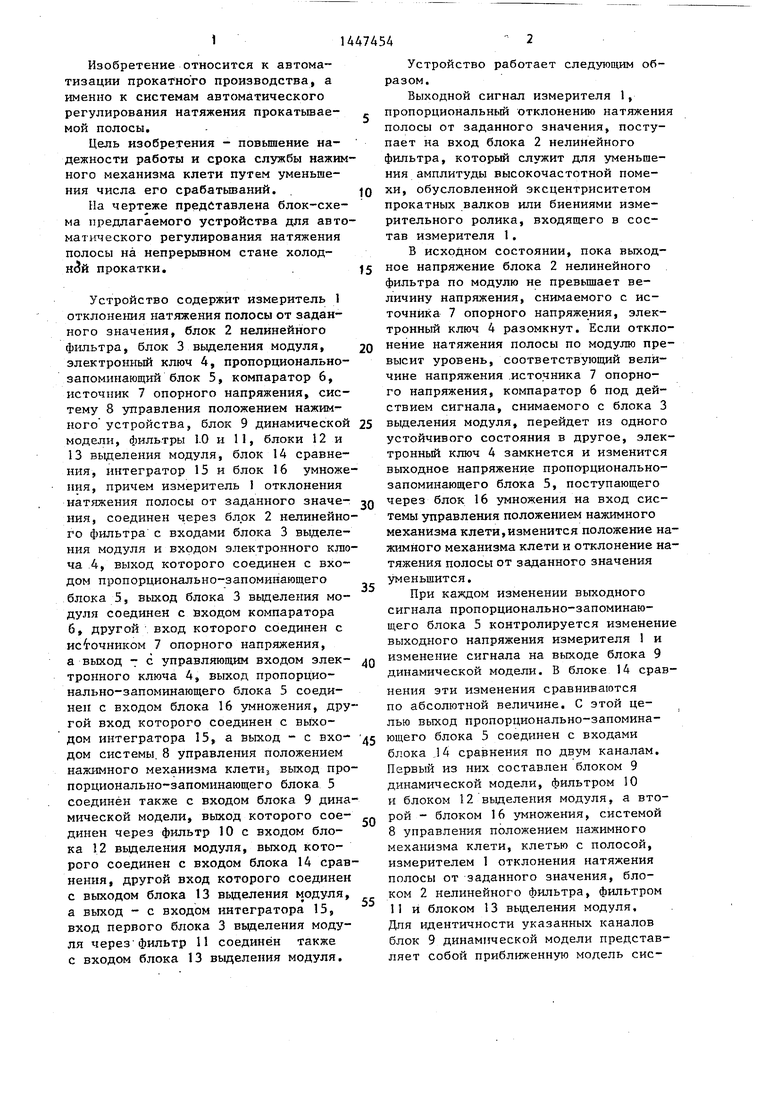
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования относительного обжатия полосы в прокатном стане и система для его осуществления | 1987 |
|
SU1503917A1 |
| Устройство для автоматического регулирования натяжения полосы на стане холодной прокатки | 1984 |
|
SU1243855A1 |
| Регулятор натяжения прокатываемой полосы | 1982 |
|
SU1058653A1 |
| Устройство регулирования ширины горячекатаных полос | 1980 |
|
SU908445A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Устройство автоматического регулирования толщины полосы | 1982 |
|
SU1044363A1 |
| Устройство регулирования ширины горячекатанных полос на непрерывном стане | 1981 |
|
SU995945A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| Устройство для автоподстройки зоны нечувствительности | 1982 |
|
SU1045969A1 |
| Устройство регулирования ширины полосы на станах горячей прокатки | 1981 |
|
SU982833A1 |

Изобретение относится к автоматизации прокатного производства и системам автоматического регулирования натяжения прокатьшаемой полосы. Цель изобретения - повьшение надежности работы и срока службы нажимного механизма клети путем уменьшения числа его срабатьшаний. Цель достигается тем, что осуществляется автоматическая подстройка коэффициента передачи по контуру регулирования натяжения полосы в соответствии с изменением технологического коэффициента клети, связьтающего величину изменения положения нажимного механизма клети с соответствующей величиной изменения натяжения полосы, ил«
4 4
Изобретение относится к автоматизации прокатного производства, а именно к системам автоматического регулирования натяжения прокатьюае- мой полосы.
Цель изобретения - повьппение надежности работы и срока службы нажимного механизма клети путем уменьшения числа его срабатьшаний.
На чертеже представлена блок-схема предлагаемого устройства для авто мапгческого регулирования натяжения полосы на непрерьшном стане холод- нЗй прокатки..
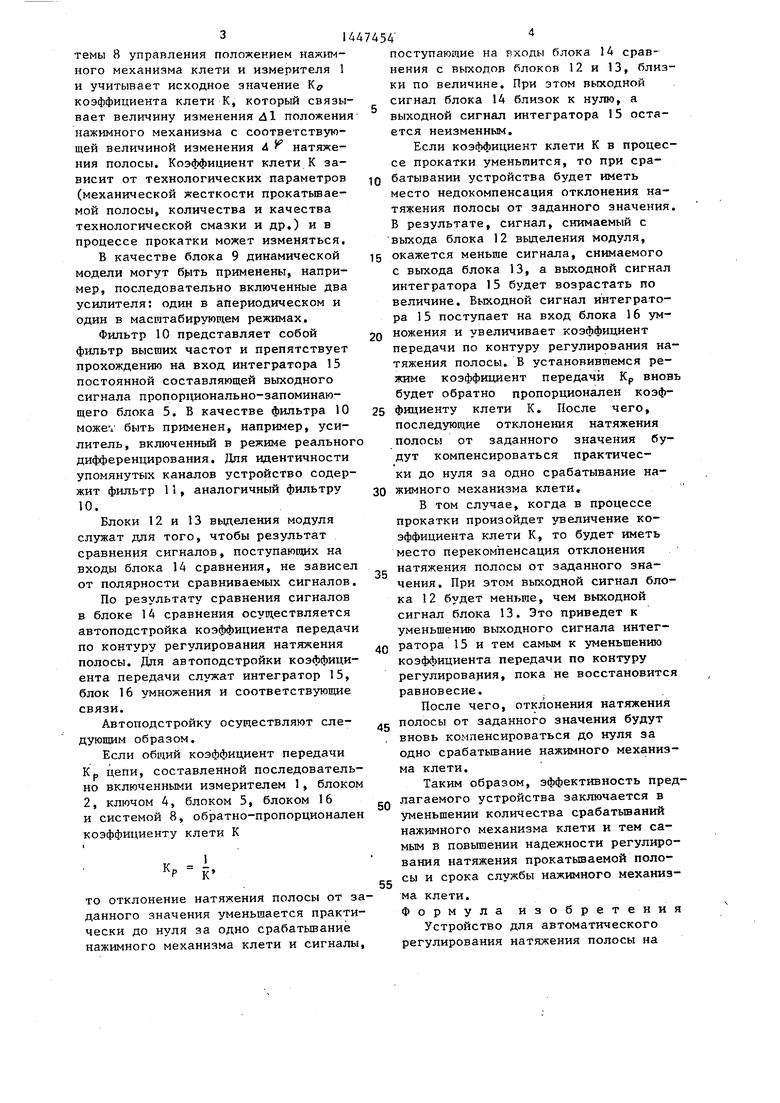
Устройство содержит измеритель 1 отклонения натяжения полосы от заданного значения, блок 2 нелинейного фильтра, блок 3 вьщеления модуля, электронный ключ 4, пропорционально- запоминающий блок 5, компаратор 6, источник 7 опорного напряжения, систему 8 управления положением нажимного устройства, блок 9 динамической модели, фильтры Ш и 11, блоки 12 и 13 вьщеления модуля, блок 14 сравнения, интегратор 15 и блок 16 умножения, причем измеритель 1 отклонения натяжения полосы от заданного значе- НИН, соединен через блок 2 нелинейного фильтра с входами блока 3 вьщеления модуля и входом электронного ключа 4, выход которого соединен с входом пропорционально-запоминающего блока 5, выход блока 3 вьщеления модуля соединен с входом компаратора б, другой вход которого соединен с источником 7 опорного напряжения, а выход - с управляющим входом элек- тронного ключа 4, выход пропорционально-запоминающего блока 5 соединен с входом блока 16 умножения, другой вход которого соединен с вьгхо- дом интегратора 15, а вьпсод - с вхо- дом системы. 8 управления положением нажимного механизма клетИ} выход пропорционально-запоминающего блока 5 соединён также с входом блока 9 динамической модели, выход которого сое- динен Через фильтр 10 с входом блока 12 выделения модуля, выход которого соединен с входом блока 14 сравнения, другой вход которого соединен с выходом блока 13 вьщеления модуля, а выход - с входом интегратора 15, вход первого блока 3 вьщеления модуля через фильтр И соединён также с входом блока 13 выделения модуля.
Q
5
0 5 Q Q j -
5
5
Устройство работает следуюп4им образом.
Выходной сигнал измерителя 1, пропорциональный отклонению натяжения полосы от заданного значения, поступает на вход блока 2 нелинейного фильтра, который служит для уменьшения амплитуды высокочастотной помехи, обусловленной эксцентриситетом прокатных валков или биениями измерительного ролика, входящего в состав измерителя 1.
В исходном состоянии, пока выходное напряжение блока 2 нелинейного фильтра по модулю не превьшает величину напряжения, снимаемого с источника 7 опорного напряжения, электронный ключ 4 разомкнут. Если отклонение натяжения полосы по модулю превысит уровень, соответствующий величине напряжения .источника 7 опорного напряжения, компаратор 6 под действием сигнала, снимаемого с блока 3 вьщеления модуля, перейдет из одного устойчивого состояния в другое, электронный ключ 4 замкнется и изменится выходное напряжение пропорционально- запоминающего блока 5, поступающего через блок 16 умножения на вход системы управления положением нажимного механизма клети,изменится положение нажимного механизма клети и отклонение натяжения полосы от заданного значения уменьшится.
При каждом изменении выходного сигнала пропорционально-запоминающего блока 5 контролируется изменение выходного напряжения измерителя 1 и изменение сигнала на выходе блока 9 динамической модели. В блоке 14 сравнения эти изменения сравниваются по абсолютной величине. С этой целью выход пропорционально-запоминающего блока 5 соединен с входами блока J4 сравнения по двум каналам. Первый из них составлен блоком 9 динамической модели, фильтром 10 и блоком 12 выделения модуля, а второй - блоком 16 умножения, системой 8 управления положением нажимного механизма клети, клетью с полосой, измерителем 1 отклонения натяжения полосы от заданного значения, блоком 2 нелинейного фильтра, фильтром 11 и блоком 13 вьщеления модуля. Для идентичности указанных каналов блок 9 динамической модели представляет собой приближенную модель сиетемы 8 управления положением нажимного механизма клети и измерителя 1 и учитывает исходное значение К коэффициента клети К, который связывает величину изменения 41 положения нажимного механизма с соответствующей величиной изменения & натяжения полосы. Коэффициент клети К зависит от технологических параметров (механической жесткости прокатьюае- мой полосы, количества и качества технологической смазки и др.) и в процессе прокатки может изменяться,
В качестве блока 9 динамической модели могут применены, например, последовательно включенные два усилителя: один в апериодическом и один в масштабирующем режимах.
Фильтр 10 представляет собой фильтр высших частот и препятствует прохождению на вход интегратора 15 постоянной составляющей выходного сигнала пропорционально-запоминающего блока 5. В качестве фильтра 10 можег быть применен, например, усилитель, включенный в режиме реальног дифференцирования. Для идентичности упомянутых каналов устройство содержит фильтр 11, аналогичнь1й фильтру 10.
Блоки 12 и 13 выделения модуля служат для того, чтобы результат сравнения сигналов, поступающих на входы блока 14 сравнения, не зависел от полярности сравниваемых сигналов.
По результату сравнения сигналов в блоке 14 сравнения осуществляется автоподстройка коэффициента передачи по контуру регулирования натяжения полосы. Для автоподстройки коэффициента передачи служат интегратор 15, блок 16 умножения и соответствующие связи.
Автоподстройку осуществляют следующим образом.
Если общий коэффициент передачи Кр цепи, составленной последовательно включенными измерителем 1, блоко 2, ключом 4, блоком 5, блоком 16 и системой 8, обратно-пропорционале коэффициенту клети К
К
то отклонение натяжения полосы от заданного значения уменьшается практически до нуля за одно срабатьшание нажимного механизма клети и сигналы.
0
5
0
поступающие на входы блока 14 сравнения с выходов блоков 12 и 13, близки по величине. При этом выходной сигнал блока 14 близок к нулю, а выходной сигнал интегратора 15 остается неизменным.
Если коэффициент клети К в процессе прокатки уменьшится, то при срабатывании устройства будет иметь место недокомпенсация отклонения натяжения полосы от заданного значения. В результате, сигнал, снимаемый с выхода блока 12 выделения модуля, окажется меньше сигнала, снимаемого с выхода блока 13, а выходной сигнал интегратора 15 будет возрастать по величине. Выходной сигнал интегратора 15 поступает на вход блока 16 умножения и увеличивает коэффициент передачи по контуру регулирования натяжения полосы. В установившемся режиме коэффициент передачи Кр вновь будет обратно пропорционален коэф- 5 фициенту клети К. После чего, последующие отклонения натяжения полосы от заданного значения будут компенсироваться практически до нуля за одно срабатывание нажимного механизма клети,
В том случае, когда в процессе прокатки произойдет увеличение коэффициента клети К, то будет иметь место перекомпенсация отклонения натяжения полосы от заданного значения . При этом выходной сигнал блока 12 будет меньше, чем выходной сигнал блока 13. Это приведет к уменьшению выходного сигнала интегратора 15 и тем самым к уменьшеншо коэффициента передачи по контуру регулирования, пока не восстановится равновесие.
После чего, отклонения натяжения полосы от заданного значения будут вновь компенсироваться до нуля за одно срабатывание нажимного механизма клети.
Таким образом, эффективность предлагаемого устройства заключается в уменьшении количества срабатываний нажимного механизма клети и тем самым в повьппении надежности регулирования натяжения прокатываемой полосы и срока службы нажимного механизма клети. Формула изобретения
Устройство для автоматического регулирования натяжения полосы на
5
0
5
0
5
непрерьшном стане холодной прокатки, содержащее измеритель отклонения натяжения полосы от заданного значения блок нелинейного фильтра, первьп блок выделения модуля, электронный ключ, пропорционально-запоминающий блок, компаратор, источник опорного напряжения и систему управления положением нажимного механизма клети, причем измеритель отклонения натяжения полосы от заданного значения соединен через блок нелинейного фильтра с входом первого блока вьще- ления модуля и входом электронного ключа, выход которого соединен с входом пропорционально-запоминающего блока, выход первого блока вьоделения модуля соединен с входом компаратора, другой вход которого соединен с выходом источника опорного напряжения, а выход - с управляющим входом электронного ключа, отличающееся тем, что, с целью повышения надежности работы и срока службы нажимного механизма клети путем
уменьшения числа его срабатываний, оно снабжено блоком динамической модели, двумя фильтрами, двумя блоками вьоделения модуля, блоком сравнения, интегратором и блоком умножения, причем выход пропорционально- запоминающего блока соединен с входом блока умножения, другой вход которого соединен с выходом интегратора,, а выход - с входом системы управления положением нажимного механизма клети, выход пропорционально-запоминающего блока соединен также с входом блока динамической модели, выход которого соединен через первый фильтр с входом второго блока вьщеления модуля, выход которого соединен с входом блока сравнения, другой вход которого соединен с выходом третьего блока вьщеления модуля, а выход - с входом интегратора, вход первого блока вьщеления модуля через второй фильтр соединен также с входом третьего блока вьщеления модуля.
| Регулятор натяжения прокатываемой полосы | 1982 |
|
SU1058653A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
