Изобретение относится к пролвасловой геофизике.
Известны устройства для контроля движения скважинного прибора, содёр- 5 жащие измерительный ролик,, диск е круговой шкалой, соединенной с по- : мощью ременной или цепной передачи с выкурным шкивом редуктора, при этом скорость вращения дис.ка пропор- 10 циональна скорости вращения измерительного ролика и отношение этих скоростей устанавливается с помощьй коробки передач редуктора 11..
Недостатком этого устройства яв- 5 ляется низкая точность поддержанйя постоянной скорости перемещения кабеля.: ;
Известна также система управления движением скважинного прибора при 20 каротаже, содержащая глубинный д атчик натяжения кабеля, подключенный к одному из входов блока управлений, регистратор и исполнительные мвхйяиэмы двигателя лебедки и еетоЕЯвозйОй 25 системы 2. При увеличении натяжения кабеля выше определенного значе-. ния, в системе формируется сигнал, отключающий питание от двигателя лебедки и вк.точающий тормозную систему. JQ
Недостатком указанной система является то, что она реагирует только на возникновение критической ситуации и только при подъеме скважинного прибора.
Цель изобретения - повышение надежности спуско-подъемных операций за счет обеспечения поддержания заданной скорости скважинного прибора.
Поставленная цель достигается тем, что система снабжена датчиками натяжения кабеля и скорости его перемещения на устье, датчиком меток глубины, двумя логическими элементамиИЛИ, переключателем и анализатором аварийных ситуаций,причем выходы датчиков натяжения кабеля и скорости его перемещения на устье и датчики меток глубины подключены к другим входам блока управления, первой выход которого подсоединен к первому.входу анализатора аварийных ситуаций, а второй и третий - соответственно к управляющему и первому информационному входам переключателя, второй и третий информационные входы которого связаны с выходами глубинного датчика на;тяжения кабеля и датчика натяжения кабеля на устье, при этом один из
выходов переключателя подключен ко второму входу анализатора аварийных ситуаций, а два других и выходал анаизатора аварийных ситуаций подсоеинены к логнческйм элементам ИЛИ, выходы которых подключены к исполниельным механизмам двигателя лебедки ее тормозной системы.
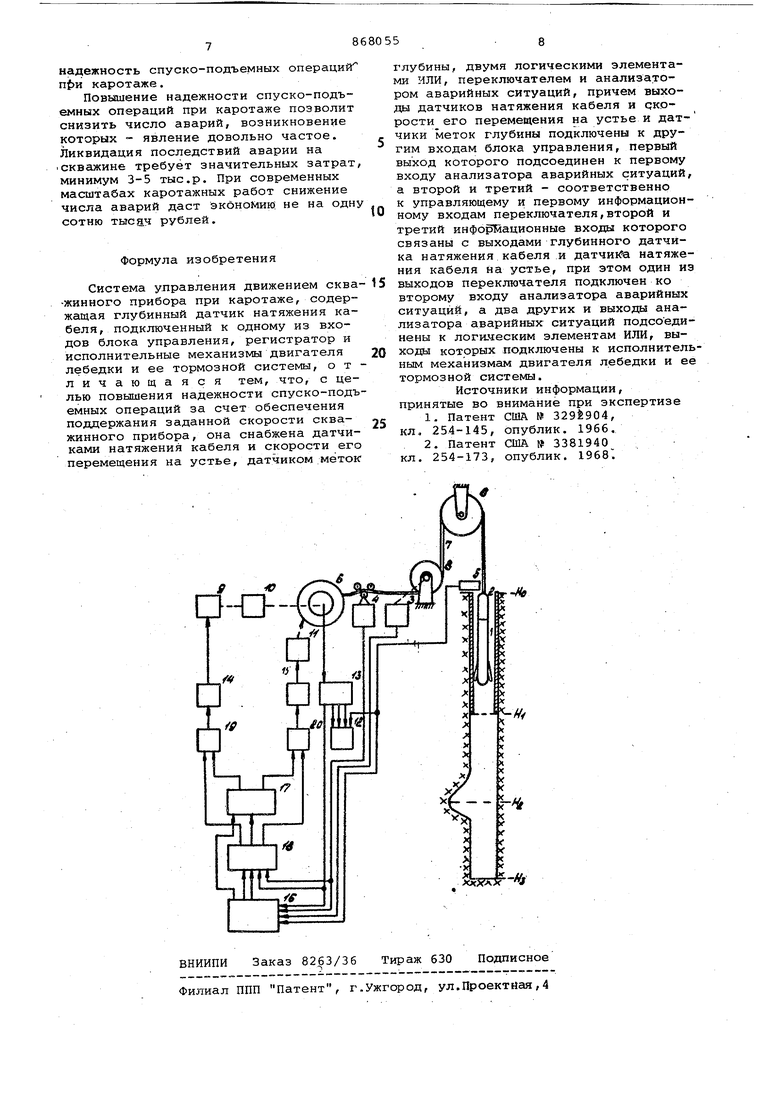
На чертеже представлена система правления движением скважинного Прибора при каротаже.
Система содержит скважинный приор 1 с расположенным в нем датчиком
2натяжения кабеля, наземные датчики
3и 4 скорости движения кабеля и его атяжения, датчик 5 меток глубины, арабан 6 с кабелем 7, который через олики 8 соединен со скважинным приором, двигатель 9 с редуктором 10, осуществляющие вращение барабана, тормозную систему 11, воздействующую Иа барабан, регистрирующее устройстjBO 12 геофизических параметров, поступающих через распределитель 13 каналов и кабель от скважинного прибора, исполнительные механизмы 14 и 15, осуществляющие подач:у необходимого количества энергии на двигатель и тормозную систему в зависимости от состояния системы, блок 16 управления, к которому подключены все датчики технического состояния системы и в который вводится информация в зависимости от конкретных условий каротажа, анализатор аварийных ситуаций 17, контролируемый критическое состояние системы и вырабатывающий сигнал воздействия на тормозное устройство системы при возникновении этого состояния, переключатель 18, подключающий дополнительные механизмы воздействия на двигатель или тормозное устройство через схемы 19 и 20 ИЛИ в зависимости от направления .движения кабеля. Во времы подготовки системы к работе и спуске прибора используется только тормозное устройство 11, управляемое вручную, двигатель же 9 находится в нерабочем состоянии, так как увеличивающейся силы веса кабеля 7 и силы прибора 1 достаточно для раскручивания барабана 6 с необходимой скоростью..При нахождении прибора 1 над устьем скважины со скважинного датчика 2 натяжения в блок 16 управленш поступает информация о натяжении кабеля, обусловленная весом прибора. Причем, при нахождении системы в данном состоянии, значения датчиков натяжения, скважинного 2 и наземного 4, должны быть практически равными. На основании полученной информации о величине статического натяжения кабеля с датчика 2 и введенных значений плотности бурового раствора и требуемой скорости спуска прибс ра в блоке 16 управления вырабатывается расчетное значение сиРналуставки нижнего натяжения кабеля. С
одной стороны расчетное значение натяжения должно быть меньше результирующей силы нижнего датчика натяжения, обусловленной силой веса прибора уменьшенной на, величину выталкивают щей силы буревого раствора и на величину сил трения, возникакицих при заданной скорости движения .прибора в ркважине. С другой стороны, эта величина силы натяжения должна быть больше некоторого минимального значения, добавление которого к силе веса кабеля, находящегося в скважине, достаточно для преодоления сил трения расторможенной лебедки и особенно в начальный момент спуска прибора.
Кроме того, блоком 16 управления вырабатывается и минимальное значение нижнего натяжения кабеля, которое Выбирается меньше расчетного и ограничивается нулевым значением, соответствующим превышению скорости кабеля над скоростью прибора, что недопустимо. Эта величина подается на анализатор аварийных ситуаций 17 на его первый Вход.
Спуск прибора начинается подачей команды Спуск. При этом тормозная система 11 освобождает барабан 6, который начинает под действием сил тяжести прибора и увеличивающейся силы веса кабеля 7 с ускорением раскр|учиваться. Линейное движение кабеля 7 преобразуется во вращательное движение нижнего ролика 8 и датчика 3 скорости, являющегося одновременно и датчиком направления движения кабе ля 7. Информация о направлении движения, поступающая с датчика 3 в блок 16 управления, анализируется им, после чего выдается сигнал переключателю 18, который переходит в положение, когда сигнал управления (рассогласования) с блока 16 управления поступает на исполнительный механизм 15 через логический элемент-20 и переключатель 18, а на второй вход анализатора 17 поступает текущее значение натяжения с датчика 2 через кабель 7 и переключатель 18.
В процессе спуска и в зависимости от величины текущего значения силы натяжения, поступающей с датчика 2, и сравнении этого значения с расчетным значением, блок 16 управления выдает сигнал рассогласования, который поступает на испольнительный механизм 15 через логический элемент 20 и перереключатель 18. Величина и знак сигнала рассогласования зависят от текущего значения натяженкгя, например, если текущее значение меньше расчетного, то это соответствует меньшей скорости движения скважинного прибора 1 относительно движения кабеля 7, уменьшить скор.ость движения которого можно увеличением воздействия силы торможени 4 системы 11 на барабан 6, если же текущее значение натяжения больше установочного, то, очевидйо что скорость кабеля меньше скороС гй прибора и для ее увеличения необходимо снизить силы торможения на 6ajpd бан, и, наконец, если текущее значение силы натяжения равно установочному значению , то это соответствует равенству скоростей движения прибора Д и кабеля 7. В случае непредвиденной остановки прибора в скважине сигнал рассогласЪ вания достигает величины, достаточно для полной остановки вращения бараба на. ,Кроме того, с целью повышения на дежности и предотвращения аварийной ситуации, останов процесса спуска осуществляется сигналом, поступающим на исполнительный Механизм 15 и логи ческую схему 20 ИЛИ с анализатором аварийных ситуаций 17, в случае, ког да текущее значение нижнего натяясенИ становится меньше минимально возмо ного., Еще до проведения каротажа бывают в какой-то степени известны глубина скважины, представляющие опасность ненужной остановки прибора. Такими значениями глубины являются забой и устье скважины, нижний конец обсадной колонны и т.д. Для более безопас ного прохождения таких мест в предусмотрено снижение скорости движения прибора при вхождении в район этих мест. Для этого в блок 16 управления вводятся значения глубин районов, представляющих опасность. На этот же блок поступают текущие значения глубины с датчика меток глу бины. При Совпадении текущего значения глубины со .значением, имеющимся, в блоке 16, последний изменяет установочное значение в сторону увеличения, на что система реагирует уменьшением скорости движения прибора. После прохождения опасного места сис тема возвращается в первоначальное состояние или останавливается. Подъем прибора из скважины начинается после команды Подъем . При этом направление вращения , нижнего ро лика 8, а, следовательно, и датчика 3скорости меняется на обратное. Бло 16 управления отреагирует на это изменение выработкой сигнала на подклвб чение выхода блока 16 управления через переключатель 18, схему 19 ИЛИ на исполнительный механизм 14 двигателя 9, подключением выхода датчика 4натяжения ко второму входу ан ши затора 17 и выработкой максимально возможного значения натяжения, поступающего на первый вход анализ ато-г ра 17. При этом сигнат рассогласования, вырабап ваемый блоком управления и . поступающий на испольнительный механизм 14, рарен разности между нощлм значением расчегного значения сигягтуставки и текущими значениями глубщного датчика натяжения.Новое же зна-« чение сигнал-уставки,вырабатываемое блоками 16 управления для режима подъема, определяется величиной статического натяжения прибора, находящёгося на заданной глубине, уменьшенной на величину выталкивающей силы и увеличенной на величину силы сопротивления, возникающей при требуемой скорости подъема, значение величины которой вводится в блок управления как параметр. Значение же максимально допустимой величины, вырабатывае ой блоком управления, должно определяться величиной несколько меньшей. при .которой может возникнуть разрыв кабеля 7 на устье скважины, причем эта величина зависит и .от глубины скважины (длины кабеля) и постоянно корректируется в процессе каротажа, При отклонении скорости движениякабеля относительно установочного значения в сторону увеличения (уменьшения) на выходе схемы появляется сиг- нсш рассогласования, воздействующий на исполнительный механизм 14 таким образом, чтобы уменьшать {увеличи,вать) подачу энергии на двигатель Э с тем, чтобы он уменьшил (увеличил) скорость вращения барабана 6 через редуктор 10. В случае, прихвата прибора в скважине скорость его уменьшается, следовательно уменьшается и скорость кабеля, на.что система ре&гирует действиями, сох.раняющими . необходимую скорость. Однако при этом возрастает натяжение кабеля, фиксиру|емое датчиком 4. Величина же этого натяжения контролируется анализатором, который при превышении предельно допустимого натяжения срабатывает. и через схемы 19 и 20 ИЛИ выдает на исполнительные механизмы 14 и 15 сигналы. При этом исполнительный механизм 14 прекращает подачу энергии-на двигатель 9 и ,он сбрасывает обороты, а исполнительный механизм 15 проводит в действие тормознуюсистему 11, которая останавливает барабан 6, и подъем прекращается. Также как при спуске прибора, при его подъеме происходит изменение скорости движения прибора в опасных местах. Описываемые процессы реакции системы на возмущения, отклоняющие ее от нормального состояния и принятие мер по устранению нежелательных от- . клонений от происходит практически мгновенно, поэтому удается сни-. зить до нуля вероятность образования петель на кабеле приспуске, мгновенно отреагировать на прихваты прибора при подъеме, не усугубляя нежелательного явления, кроме того. Снизить вероятность возникновения аварийной ситуации снижением скорости движения прибора в неблагоприятных местах скважины, что в совокупности повышает

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением скважинного прибора при каротаже | 1985 |
|
SU1312160A2 |
| Система дистанционного контроля безопасности при проведении геофизических исследований и работ в действующих газовых скважинах | 2022 |
|
RU2810668C1 |
| Каротажная станция | 1988 |
|
SU1749867A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЫЧАЖНОГО УСТРОЙСТВА ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ И СИЛЬНОНАКЛОННЫЕ УЧАСТКИ ОБСАЖЕННЫХ И НЕОБСАЖЕННЫХ СКВАЖИН | 2020 |
|
RU2739781C1 |
| Спуско-подъемное устройство каротажной станции | 1988 |
|
SU1544960A1 |
| УСТРОЙСТВО ДЛЯ СПУСКА И ПОДЪЕМА СКВАЖИННЫХ ПРИБОРОВ | 1994 |
|
RU2087668C1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖА СКВАЖИН, ОБСАЖЕННЫХ МЕТАЛЛИЧЕСКОЙ КОЛОННОЙ | 2011 |
|
RU2488852C1 |
| Устройство для каротажа скважин, обсаженных металлической колонной | 2011 |
|
RU2630991C1 |
| РЫЧАЖНОЕ УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ СКВАЖИНЫ И ЕГО УЗЕЛ ФИКСАЦИИ | 2020 |
|
RU2742922C1 |
| СПОСОБ НЕЙТРОННОГО АКТИВАЦИОННОГО КАРОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2073895C1 |
