9
00 00
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделированияСиНХРОННОгО гЕНЕРАТОРА | 1979 |
|
SU805360A1 |
| Способ управления виброприводом манипулятора | 1986 |
|
SU1493458A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство слежения за дорожкой дискового носителя информации | 1987 |
|
SU1614031A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Устройство для измерения диэлектрических параметров материалов | 1982 |
|
SU1302213A1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |
| Устройство для моделирования синхронного генератора | 1982 |
|
SU1068952A2 |

Изобретение относится к электротехнике и может быть использовано для управления исполнительными органами автоматических систем и роботов. Цель изобретения состоит в повьшении точности позиционирования. На две фазы 3 и 4 синхронного двигателя 5 поочередно подают импульсы постоянной полярности, имекщие-либо различную амплитуду, либо различную длительность, что определяется выполнением модулятора 2. Частоту генератора 1 выбирают такой, при которой момент трения в опорах двигателя имеет наименьшее значение. 3 ил. S (Л с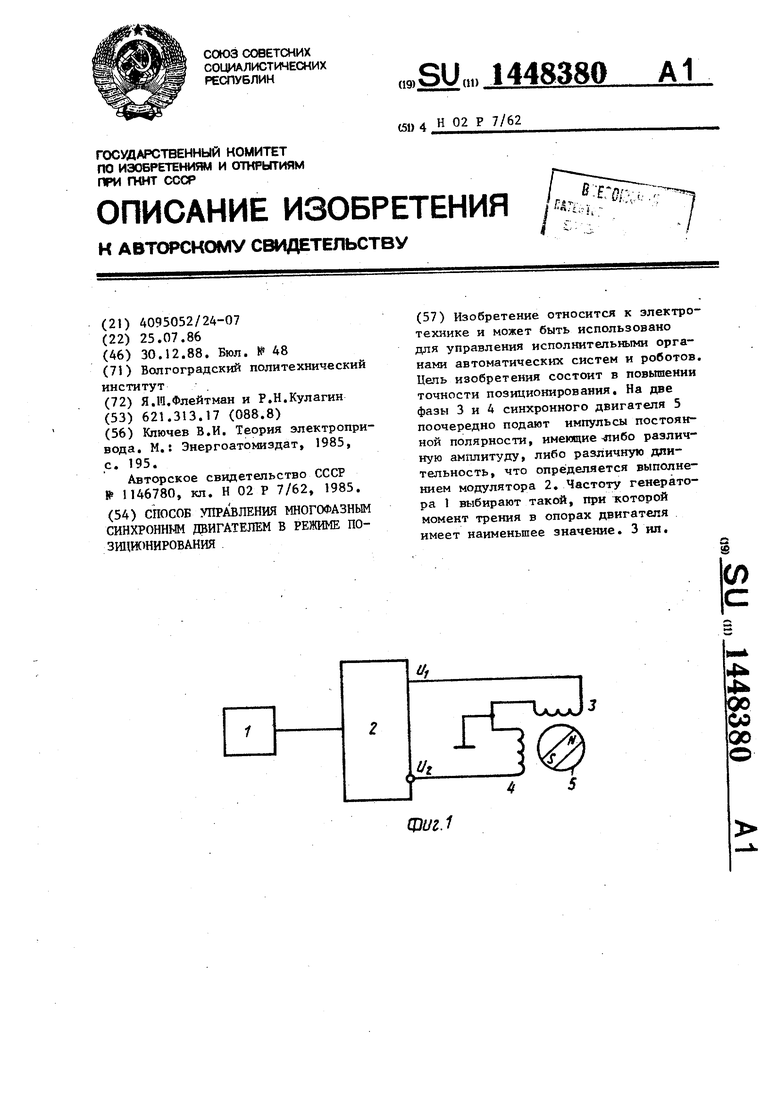
(DUt.1
Изобретение относится к управле- йию электрическими машинами и может быть использовано для управления исполнительными органами автоматичеких систем и роботов.
Цель изобретения состоит в повышении точности позиционирования.
На фиг,1 показана схема устройства для осуществления предлагаемого способа; на фиг,2 - временные диаграммы при изменении амплитуды импульсов постоянной полярности; на фиг.З - временные диаграмм. гфи изменении скважности импульсов постоянной полярности.
Устройство содержит генератор 1 импульсов регулируемой частоты, модулятор 2 импульсов, прямой и инверсный выходы которого соединеШ) с двумя фазами 3 и 4 двигателя 5,
Модулятор 2 импульсов может быть либо амплитудным с заданием ра личной амплитуды на прямом и инверсном выходах, либо широтнотгимпульсны модулятором с переключением напря зсения на прямом и инверсном выходах Способ осуществляется следующим образом.
От генератора импульсов 1 сигнал поступает на модулятор 2 импульсов, в котором осуществляется амплитудна или широтно-импульсная модуляция сигнала, С выходов модулятора 2 на фазы 3 и 4 синхронного двигателя 5 поочередно подают импульсы постоянного напряжения U и U соответственно. На третью фазу может быть подано постоянное напряжение. Это возбуждает угловые колебания вала двигателя 5. Изменяют частоту генератора 1 и, измеряя момент трения в опорах двигателя 5, определяют частоту, при которой этот момент минимален. Эта частота фиксируется. Затем изменяют разность средних зна
0
5
0
5
чений токов обмоток (3 и 4) изменением амплитуды импульсов постоянного напряжения или их скважности. За счет инерционности вал 5 дискретно поворачивается на заданный угол с малым моментом трения. Это существенно снижает момент сопротивления, примерно на 60% относительно статического момента сопротивления. Таким образом исключается нелинейность типа сухого трения. Это позволяет повысить точность позиционирования вала синхронного двигателя. Остаточные колебания вала в установквшемся режиме значительно меньшие, чем требуемая погрешность позиционирования.
Проводилось управление синхронным двигателем марки СД10-У42. На частоте i,5 кГц обеспечивалось позиционирование в диапазоне 0-90 с точностью 5 . Такая точность недостижима для базового объекта и прототипа.
Достоинством предлагаемого способа является простота реализации, так как может быть использован серийный синхронный двигатель. Диапазон угловых перемещений определяется конструкцией двигателя и ограничен обычно 90 . Предлагаемый способ может найти широкое применение в следящих системах технологических мащин и роботов
0
35 Формула изобретения
Способ управления многофазным синхронным двигателем в режиме пози- циони роваиия, включающий питание двух фаз попеременно импульсами постоянной полярности, отличающий- с я тем, что, с целью повьшения точности позиционироваиия, импульсы на фазы подают с частотой, соответ- с твующей наименьшему моменту трения в опорах.
и,
Ui
Ui
ot
JL
Фиг, г
JL
ГП
Фиг.З
| Ключев В.И | |||
| Теория электропривода | |||
| М.: Энергоатоютэдат, 1985, с | |||
| Регулятор давления для автоматических тормозов с сжатым воздухом | 1921 |
|
SU195A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
