4::
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ запуска конвейера и устройство для его осуществления | 1988 |
|
SU1602823A1 |
| Способ управления ленточным конвейером | 1988 |
|
SU1666413A1 |
| Способ управления многодвигательным электроприводом | 1983 |
|
SU1200375A1 |
| Устройство для запуска конвейера | 1990 |
|
SU1708716A1 |
| Способ пуска двух групп гистерезисных электродвигателей | 1989 |
|
SU1758816A1 |
| Способ управления электроприводом | 1985 |
|
SU1359878A1 |
| Спиральный конвейер с управляемым натяжным устройством | 2014 |
|
RU2644075C2 |
| Устройство для управления электроприводом конвейера | 1985 |
|
SU1320137A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Способ подключения асинхронного электродвигателя к резервному преобразователю частоты | 1989 |
|
SU1683129A1 |
Изобретение относится к эЯект- ротехнике и может быть использовано в конвейерах. Целью изобретения является повьппение надежности путем предотвращения перегрузки двигате. лей и ограничения усилий в. конвейере. Согласно данному способу формируется закон управления, обеспечивающий оптимальные условия работы конвейера. В данном устройстве обес- печивается равная загрузка двигателей каждой группы сепаратных систем регулированием козффициента отрицательной обратной связи по моменту каждой сепаратной системы управления .2 ил. i СО
о а
Изобретение относится к электро- , технике и может быть использовано в механизмах с несколькими приводными двигателями, загрузка которых должна быть равномерной и ограниченной наперед заданной величиной, например, в ленточных- цепных, пластинчатых конвейерах.
Целью изобретения является повышение надежности путем прёдотвраще- .ния перегрузки двигателей и ограничения усилий конвейера.
На фиг. 1 представлена схема
конвейерной ленты, его поддержив на уровне, при котором моменты электродвигателей 6 недостаточны начала движения. В этот период вр ни блок 3 ограничения (фиг. 2) ог ничивает величину выходного напря ния регулятора 2 скорости на уров
Wwm.i ) определяемом из тех же у
Ш
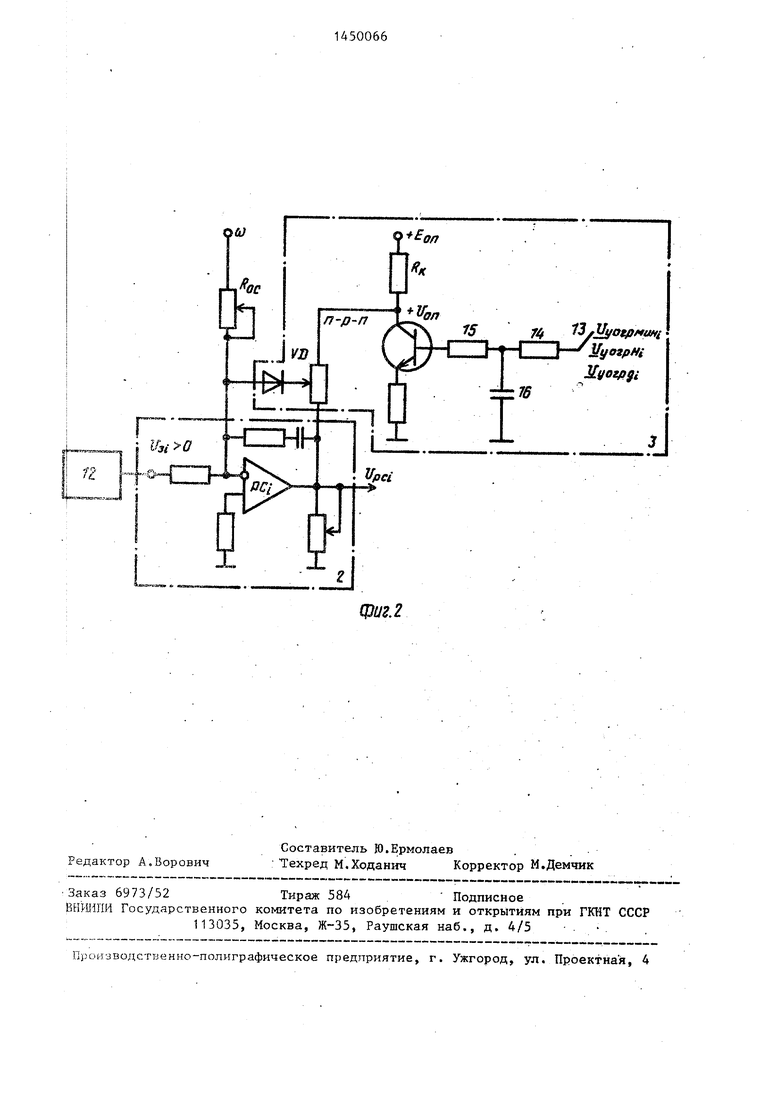
электропривода, на фиг. 2 - схема напряжения уставки
Ц
ВИЙ, что и U.np.i .
Ключ 13 представляет из себя к мутатор, который через наперед за ные интервалы времени подключает зистор 14 к одному из трех уровне
гулятора .скорости и блока ограничения.
Электропривод содержит п групп сепаратных систем. Каждая группа состо
Через фиксированный момент вре ни, определяемый временным реле,
дающее напряжение с блока
увеличивают до величины Ц
12 плав и и.
VP- г-
rfT из устройства 1 сравнения, регуля-20 ), обеспечивающей трогание
30
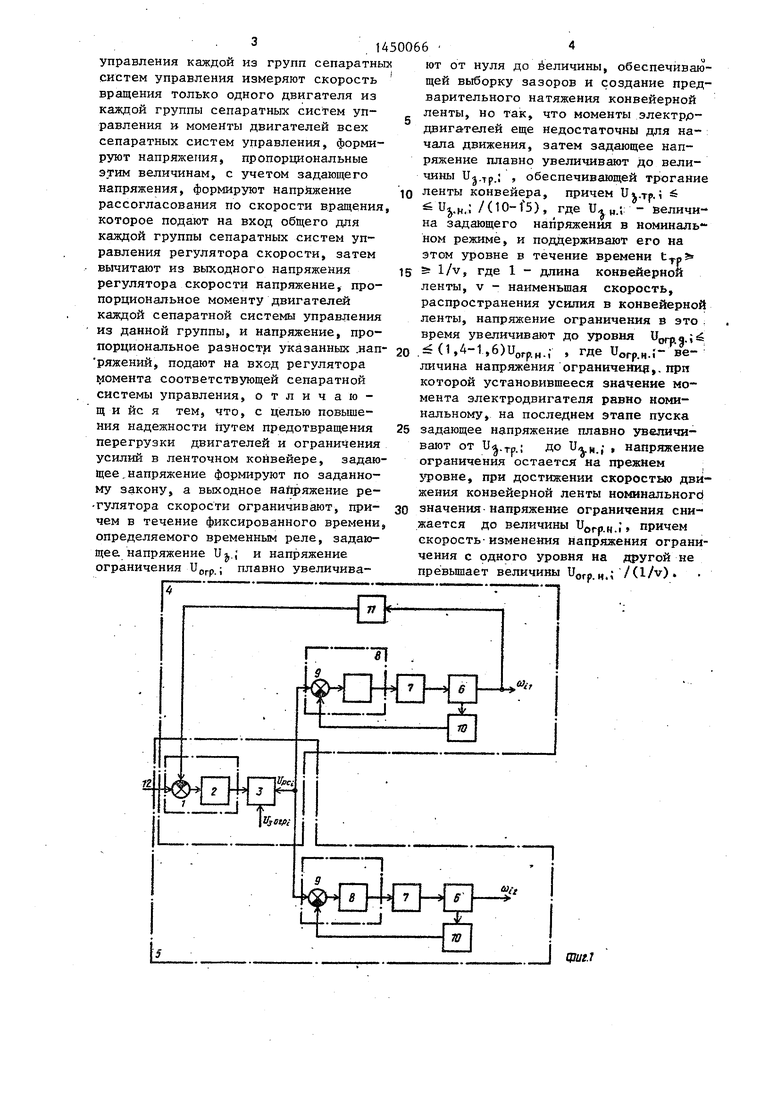
тора 2 скорости, блока 3 ограничения и нескольких (например, двух) сепа- ратных систем 4 и 5 управления, включающих в себя электродвигатель 6, тиристорный преобразователь 7, регу- 55 лятор 8 тока, сумматор 9, датчик 10 момента. Кроме того, одна из сепаратных систем группы снабжена .датчиком 11 скорости вращения электродвигателя 6, выход которого подключён к первому входу устройства 1 срав-г I нения. К второму входу устройства 1 j сравнения подключен выход блока 12 I задания скорости. Выход устройства 1 сравнения соединен с входом регулятора 2 скорости, выход которого че- ; рез блок 3 ограничения подключен к I первым входам всех сумматоров 9 се- : паратных систем. К второму входу I сумматора 9 в каждой сепаратно|й сист;еме подключается с обратным знаком выход датчика 10 момента электродвигателя 6. ,
Выход сумматора .9 соединен с вхо дом регулятора 8 тока. Выход регулятора 8 тока подключен на вход ти- ристорного преобразователя 7,,выход которого соединен с электродвигате- пец 6.
Электропривод работает, следующим образом.50
При пуске задающее напряжение и.,- , поступающее на второй.вход устройства 1 сравнения, каждой i группы сепаратных систем с блока 12 задания скорости плавно увеличивают от нуля 55 до величины Uvnp.; Это напряжение предназначено для выборки зазоров и создания предварительного натяжения
40
45
ленты конвейера, и поддерживают е на .этом уровне в течение времени tnp 1/V, где U l.v,,;. .- величина задающего напряжения в номинальном режиме, 1 - длина конвейерной лент V - наименьшая скорость распростра нения усилия в конвейерной ленте. ЭТО время ключ 13 подключает резис 14 к напряжению Uij.oip.g.; и напряжен ограничения регулятора скорости по держивают на уровне , ; (1,4- U6)Uofp.; , где ., - величина напряжения ограничения, при котор установившееся значение момента электродвигателя 6 равно номинальн W.
На последнем этаце пуска задающ напряжение плавно увеличивают от Ui.p.; до Ui,. Напряжение ограниче ния остается на прежнем уровне Пр достижении скорости двюкения конве ерной ленты номинального значения напряжение датчика скорости,вращен достигнет уровня достаточного для срабатывания реле, которое переклю ет ключ 13 и тем самьм подключает .зистор.14 к напряжению и.огр.н.. Пр этом напряжение ограничения сниясае .ся до величины УОГ. Н., Скорость из менения напряжения ограничения с кого уровня на другой определяется велич1 ной резисторов 14 и 15 и емкостью конденсатора 16,, -причем ока не должна превышать значения Uopf-H/d/v),.
Формула изоб-ретени
Способ управления многодвигат ейь ным электроприводом, при котором дл
конвейерной ленты, его поддерживают на уровне, при котором моменты электродвигателей 6 недостаточны для начала движения. В этот период времени блок 3 ограничения (фиг. 2) ограничивает величину выходного напряжения регулятора 2 скорости на уровнеWwm.i ) определяемом из тех же усло
Ц
ВИЙ, что и U.np.i .
Ключ 13 представляет из себя коммутатор, который через наперед заданные интервалы времени подключает резистор 14 к одному из трех уровней
напряжения уставки
Через фиксированный момент времени, определяемый временным реле, задающее напряжение с блока
увеличивают до величины Ц
12 плавно и и.
VP- ), обеспечивающей трогание
0 ), обеспечивающей трогание
0
5
0
0
5
ленты конвейера, и поддерживают его на .этом уровне в течение времени tnp 1/V, где U l.v,,;. .- величина задающего напряжения в номинальном режиме, 1 - длина конвейерной ленты, V - наименьшая скорость распространения усилия в конвейерной ленте. В ЭТО время ключ 13 подключает резистор 14 к напряжению Uij.oip.g.; и напряжение . ограничения регулятора скорости поддерживают на уровне , ; (1,4- U6)Uofp.; , где ., - величина напряжения ограничения, при которой установившееся значение момента электродвигателя 6 равно номинально W.
На последнем этаце пуска задающее напряжение плавно увеличивают от Ui.p.; до Ui,. Напряжение ограничения остается на прежнем уровне При достижении скорости двюкения конвей- ерной ленты номинального значения напряжение датчика скорости,вращения достигнет уровня достаточного для срабатывания реле, которое переключает ключ 13 и тем самьм подключает ре- .зистор.14 к напряжению и.огр.н.. При этом напряжение ограничения сниясает- .ся до величины УОГ. Н., Скорость из-- менения напряжения ограничения с од-- кого уровня на другой определяется велич1 ной резисторов 14 и 15 и емкостью конденсатора 16,, -причем ока не должна превышать значения Uopf-HJ/.
/d/v),.
Формула изоб-ретения
Способ управления многодвигат ейь- ным электроприводом, при котором для
управления каждой из групп сепаратных систем управления измеряют скорость вращения только одного двигателя из каждой группы сепаратных систем управления и моменты двигателей всех сепаратных систем управления, формируют напряжения, пропорциональные этим величинам, с учетом задающего напряжения, формируют напрйжение рассогласования по скорости вращения, которое подают на вход общего для каждой группы сепаратных систем управления регулятора скорости, затем вычитают из выходного напряжения регулятора скорости напряжение, пропорциональное моменту двигателей каждой сепаратной системы управления из данной группы, и напряжение, проют от нуля до величины, обеспечиваю щей выборку зазоров и создание предварительного натяжения конвейерной ленты. Но так, что моменты электрр- двигателей еще недостаточны для начала движения, затем задающее напряжение плавно увеличивают до величины Uj.p.; , обеспечивающей трогание
10 ленты конвейера, причем и.тр. S и.„.; /(10-15), где U „.; - величина задающего напряжения в номинальном режиме, и поддерживают его на этом уровне в течение времени t
15 1/V, где 1 - длина конвейерной ленты, V - наименьшая скорость, распространения усилия в конвейерной ленты, напряжение ограничения в это время увеличивают до уровня Uoraf.i
порциональное разности указанных .нап- 2о . (1,4-1,6)иогр.„.,- , где Uorp.H.f-
ПСТ ЙГОи М ЙГ m TTQtnn U S e-Vr rr -«Q Птт1-г -1-гт лтч ft f
ряжений, подают на вход регулятора момента соответствующей сепаратной системы управления, отличаю- щ и йс я тем, что, с целью повышения надежности путем предотвращения перегрузки двигателей и ограничения усилий в ленточном конвейере, задающее, напряжение формируют по заданному закону, а выходное натфяжение ре- гулятора скорости ограничивают, причем в течение фиксированного времени, определяемого временным реле, задающее напряжение U.j и напряжение ограничения ; плавно увеличиваf
личина напряжения ограничен,, при которой установившееся значение момента электродвигателя равно номинальному, на последнем этапе пуска
25 задающее напряжение плавно увеличивают от и.тр,; до .; напряжение ограничения остается на прежнем уровне, при достижении скоростью движения конвейерной ленты номинального
30 значения напряжение ограничения снижается до величины и, „.;, причем скорость-изменения напряжения ограничения с одного уровня на другой не прёвьш1ает величины Uorp. н.( /С1/)«
ют от нуля до величины, обеспечивающей выборку зазоров и создание предварительного натяжения конвейерной ленты. Но так, что моменты электрр- двигателей еще недостаточны для начала движения, затем задающее напряжение плавно увеличивают до величины Uj.p.; , обеспечивающей трогание
ленты конвейера, причем и.тр. S и.„.; /(10-15), где U „.; - величина задающего напряжения в номинальном режиме, и поддерживают его на этом уровне в течение времени t
1/V, где 1 - длина конвейерной ленты, V - наименьшая скорость, распространения усилия в конвейерной ленты, напряжение ограничения в это время увеличивают до уровня Uoraf.i
(1,4-1,6)иогр.„.,- , где Uorp.H.f-
f
личина напряжения ограничен,, при которой установившееся значение момента электродвигателя равно номинальному, на последнем этапе пуска
5 задающее напряжение плавно увеличивают от и.тр,; до .; напряжение ограничения остается на прежнем уровне, при достижении скоростью движения конвейерной ленты номинального
0 значения напряжение ограничения снижается до величины и, „.;, причем скорость-изменения напряжения ограничения с одного уровня на другой не прёвьш1ает величины Uorp. н.( /С1/)«
Uff
.J
Л7
QlUt.7
tJ Otfffflfffl
Луолрт
Hyoeffgi
Щи г, 2
| Способ автоматического распределения нагрузок в многодвигательном электроприводе технологического пресса | 1980 |
|
SU972645A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Способ управления многодвигательным электроприводом | 1984 |
|
SU1259464A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
