11
Изобретение относится к электротехнике и мсржет быть использовано в эппектроприводах.
Целью изобретения является повышение .надежности путем уменьшения динамических нагрузок.
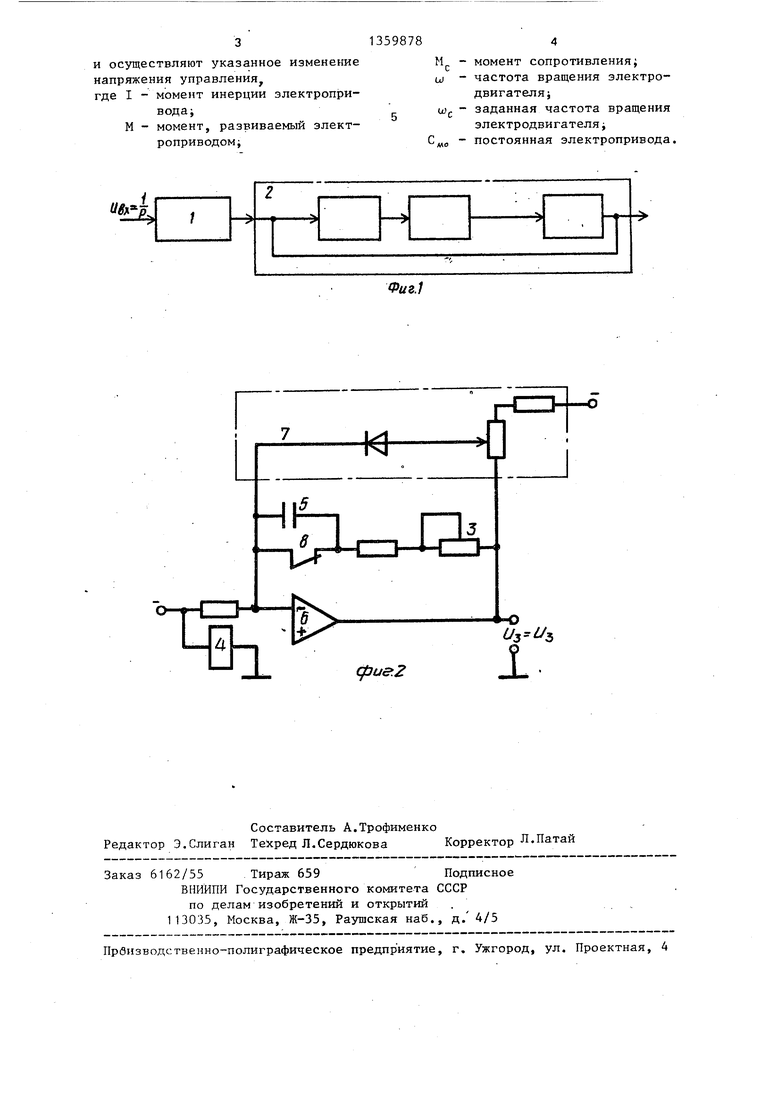
На фиг. 1 приведена схема электропривода, реализующая способ управления; на фиг, 2 - схема задатчика ин- тенсивности и временная диаграмма ег работы.
Электропривод, реализуюш 1й способ управления, содержит задатчик 1 интенсивности и систему 2 управления электроприводом, например подчиненного регулирования, включающую контуры регулирования скорости и тока электродвигателя.
Схема задатчика 1 интенсивности включает резистор 3, реле 4 времени, конденсатор 5, операционный усилитель 6 и блок 7 ограничения выходного напряжения. Блок 7 ограничения и последовательно соединенные резистор 3 и конденсатор 5 включены в цепь обратной связи операционного усилителя 6. Катушка реле 4 времени подключена параллельно входу операционного усилителя 6, а размыкающий кон- такт 8 реле 4 включен параллельно конденсатору 5,
Сущность способа управления заключается в том, что напряжение управления электроприводом увеличивают по линейному закону с последующим ограничением его величины при достижении скорости электродвигателя заданного значения, причем при подключени электродвигателя устанавливают вели- чину напряжения управления, пропорциональную , , через время
(J, -.
t
cJu)
Способ управления электроприводом
осуществляют изменение напряжения уп- 45 согласно которому напряжение управМ, равления, где I- момент инерции электропривода;
М - момент, развиваемый электроприводом
момент сопротивления; частота вращения электродвигателя;
заданная частота вращения электродвигателяj постоянная электропривода. Устройство, реализующее способ управления, работает cлeдyюIIlд м образом.
с
W
с«„Ленин электроприводом увеличивают по линейному закону с последующим ограничением его величины при достижении скоростью электродвигателя заданного
50 значения, отличающийся тем, что, с целью повышения надежности путем уменьшения динамических нагрузок при подключении электродвигателя устанавливают величину С на55 пряжения управления, пропорциональИУЮ
t
, через время
0,59 We
М - М,
dio
5
0 5 о
Q
5
При подаче напряжения U на вход задатчика 1 интенсивности в течение времени tj, контакт реле 4 шунтирует конденсатор и на выходе задатчика интенсивности напряжение U, постояно
ное и пропорционально параметру С 1/С, Затем контакт реле 4 времени размыкается и напряжение на выходе задатчика 1 интенсивности линейно увеличивается во времени до предельного напряжения Uj, определяемого блоком 7 ограничения.
На первом этапе разгона в течение заданного параметрами электропривода времени величину напряжения управления (напряжение задания скорости на выходе задатчика интенсивности) поддерживают постоянной и пропорциональной параметру ,р . На этом этапе, т.е, при трогании и пуске, обеспечивается ограничение динамических усилий, что особенно важно в электроприводах с существенными упругостями и большими моментами инерции, например в электроприводах . конвейерных лент,
Длительность этого этапа строго определена заданной скоростью и параметрами электропривода. После обработки первого этапа задатчик интенсивности формирует напряжение управления (напряжение задания скорости) , линейно изменяющееся во времени с ограничением на максимально допус- , ТИМОМ уровне. Способ управления электроприводом с жестко заданньши параметрами режима трогания и пуска позволяет повысить надежность электропривода в целом.
Формула изобрегения
-
Способ управления электроприводом,
5 согласно которому напряжение управЛенин электроприводом увеличивают по линейному закону с последующим ограничением его величины при достижении скоростью электродвигателя заданного
значения, отличающийся тем, что, с целью повышения надежности путем уменьшения динамических нагрузок при подключении электродвигателя устанавливают величину С напряжения управления, пропорциональ / мв
t
, через время
0,59 We
М - М,
dio
и осуществляют указанное изменение
напряжения управления,
где I - момент инерции электропривод а j
М - момент, развиваемый электроприводом;
I
-I ГПз
.j-M
- ДрДЧГГЬ-ЧГЭмомент сопротивления;
частота вращения электродвигателя;
заданная частота вращения
электродвигателя; постоянная электропривода.
Г
(ие.2
6(
1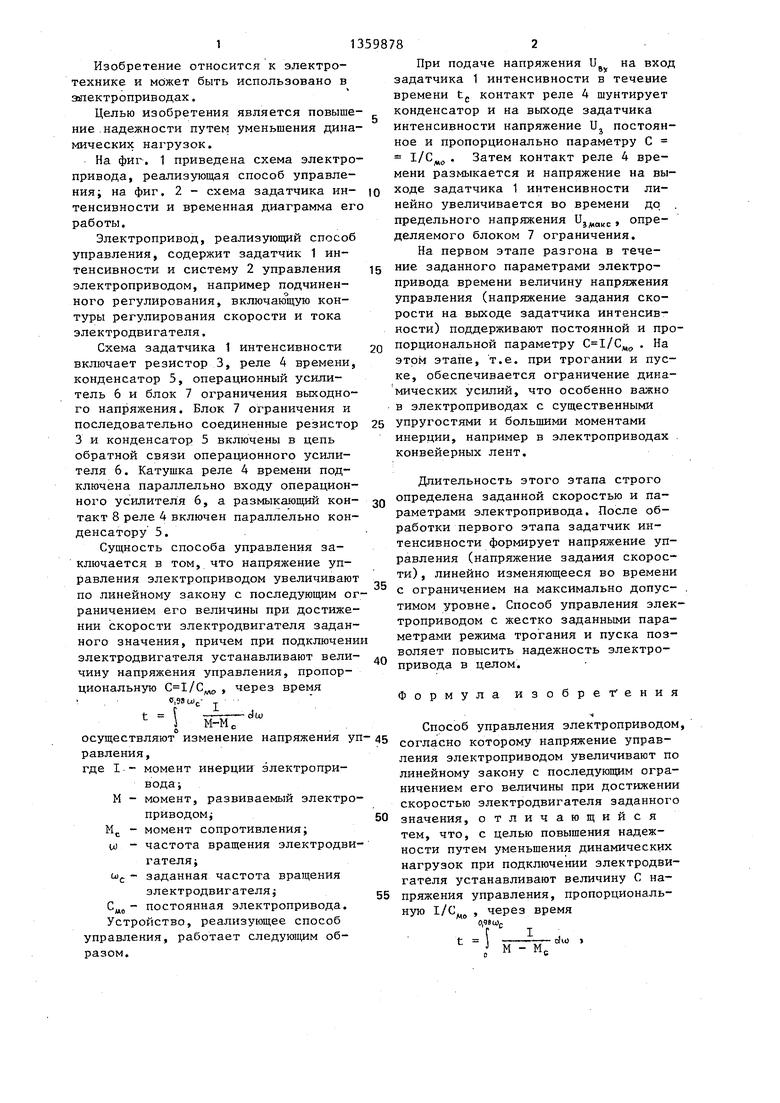
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ленточным конвейером | 1988 |
|
SU1666413A1 |
| Устройство для задания режима движения шахтной подъемной установки | 1986 |
|
SU1444265A2 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Способ пуска малоинерционного асинхронного электродвигателя | 1983 |
|
SU1108589A1 |
| Устройство для задания скорости электропривода | 1982 |
|
SU1026266A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для регулирования напряжения тягового генератора тепловоза | 1984 |
|
SU1219425A1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2538907C1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к электротехнике и может быть использовано в ленточньж конвейерах, в шахтньпс. подъемных машинах. Целью изобретения является повышение надежности путем ограничения динамических нагрузок. По данному способу управления формируют на выходе задатчика интенсивности постоянное напряжение С После окончания переходного процесса при достижении электродвигателем частоты We суммируют выходной сигнал, равный С, с сигналом, линейно изменяющимся во времени. При достижении скоростью электродвигателя заданного значения, выходную величину задатчика интенсивности поддерживают постоянной. 2 ил. (Я со ел со 00 СХ)
| Задатчик управляющего напряжения для электроприводов подъемно-транспортных механизмов | 1976 |
|
SU600680A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Башарин А.В | |||
| Управление электроприводами | |||
| Л.: Энергоиздат,1982, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
