10
Изобретение относится к приборостроению и может быть использовано в устройствах вывода графической информации (графопос рроителях) .
Целью изобретения являет ся упрощение привода и повышение его точности.
На чертеже представлена кинематическая схема привода.
Привод каретки для графопостроителя содержит основание 1, на котором установлен двигатель 2, кинематически связанный с барабаном 3, соединенным с кареткой 4 посредством 15 троса 5, установленного на роликах 6 и 7, концы троса 5 жестко закреплены на основании 1, два Г-образных пово- ротных двуплечих рычага 8 и 9, оси 10-и 11 которых установлены на каретке 4. При этом одни плечи рычагов 8 и 9 шарнирно соединены между собой с помощью шарнира 12. На вторых плечах рычагов 8 и 9 имеются оси 13 и 14, на которых установлены связанные с тросом 5 ролики 6 и 7. Второе плечо рычага 9 соединено через серьгу 15, расположенную на оси 16 с тягой 17, которая размещена в стойке 18 и подпружинена пружиной 19.30 Элементы 8-19 образуют регулятор натяжения троса. Для монтажа троса 5 служат ролики 20, закрепленные на основании 1.
этом рычаг 9 поворачивается против часовой стрелки вокруг оси 10 и перемещает нижний ролик 6 вверх на величину ч, натягивая нижнюю ветвь троса 5. Одновременно рычаг 9 через шарнир 12 поворачивает рычаг 8 вокруг оси 11 по часовой стрелке. При этом верхний ролик 7 перемещается вниз также на величину ч. Следовательно, нижняя и верхняя ветви натягиваются одинаково, а каретка 4 при этом остается на месте.
Таким образом, в процессе регулирования усилия натяжения троса 5 сохраняется заданное положение каретки 4 и, следовательно, не увели- . чивается погрешность координатных перемещений.
Использование предлагаемого привода для каретки графопостроителя позволяет повысить точность графических построений в процессе эксплуатации графопостроителей в САПР, а также упростить конструкцию привода.
20
25
Формула изобрет-ения
Привод каретки для графопостроителя, coдepжaшJ й двигатель, установленный на основании и кинематически связанный с барабаном, соединенным с кареткой посредством троса, установленного на роликах и намотан.tJJDClJnrirl I «
Привод каретки работает следующим ного на барабан, и регулятор натяжеUIJ.CT ri.r.or ci п Т тт тг и Я m 1Г1 И И С Я
образом.
От двигателя 2 вращается барабан 3. При этом происходит наматывание на барабан 3 одной из ветвей троса 5 и сматывание другой ветви. Через ролики 6 и 7 перекатывается трос 5 и перемещает каретку 4. Заданная величина натяжения троса 5 обеспечивается взаимодействием пружины 19 с роликами 6 и 7 через тягу 17, серьгу 15 и рычаги В и 9. Регулирование усилия натяжения троса 5 в процессе работы привода произво- дится следующим образом. При уменьшении усилия натяжения троса 5 от его вытяжки и износа, а также износа роликов 6,7 и 20 пружина 19 перемещает тягу 17 и серьгу 15 вверх. При
40
45
50
ния троса, отличающийся тем, что, с целью упрощения привода и повьш ения его точности, регулятор натяжения троса выполнен в виде подпружиненной регулируемой тяги и двух Г-образных поворотных рычагов, оси поворота которых расположены на каретке в параллельной направлению ее перемещения плоскости, при этом одни плечи рычагов шарнирно соединены между собой, а на двух других параллельно друг другу установлены ролики, -связанные с тросом, концы которого жестко закреплены на основании, а подпружиненная регулируемая тяга расположена на каретке и соединена со свободным концом одного из рычагов.
10
15 .30 17452
этом рычаг 9 поворачивается против часовой стрелки вокруг оси 10 и перемещает нижний ролик 6 вверх на величину ч, натягивая нижнюю ветвь троса 5. Одновременно рычаг 9 через шарнир 12 поворачивает рычаг 8 вокруг оси 11 по часовой стрелке. При этом верхний ролик 7 перемещается вниз также на величину ч. Следовательно, нижняя и верхняя ветви натягиваются одинаково, а каретка 4 при этом остается на месте.
Таким образом, в процессе регулирования усилия натяжения троса 5 сохраняется заданное положение каретки 4 и, следовательно, не увели- . чивается погрешность координатных перемещений.
Использование предлагаемого привода для каретки графопостроителя позволяет повысить точность графических построений в процессе эксплуатации графопостроителей в САПР, а также упростить конструкцию привода.
20
25
Формула изобрет-ения
Привод каретки для графопостроителя, coдepжaшJ й двигатель, установленный на основании и кинематически связанный с барабаном, соединенным с кареткой посредством троса, установленного на роликах и намотанного на барабан, и регулятор натяжеUIJ.CT ri.r.or ci п Т тт тг и Я m 1Г1 И И С Я
0
5
0
ния троса, отличающийся тем, что, с целью упрощения привода и повьш ения его точности, регулятор натяжения троса выполнен в виде подпружиненной регулируемой тяги и двух Г-образных поворотных рычагов, оси поворота которых расположены на каретке в параллельной направлению ее перемещения плоскости, при этом одни плечи рычагов шарнирно соединены между собой, а на двух других параллельно друг другу установлены ролики, -связанные с тросом, концы которого жестко закреплены на основании, а подпружиненная регулируемая тяга расположена на каретке и соединена со свободным концом одного из рычагов.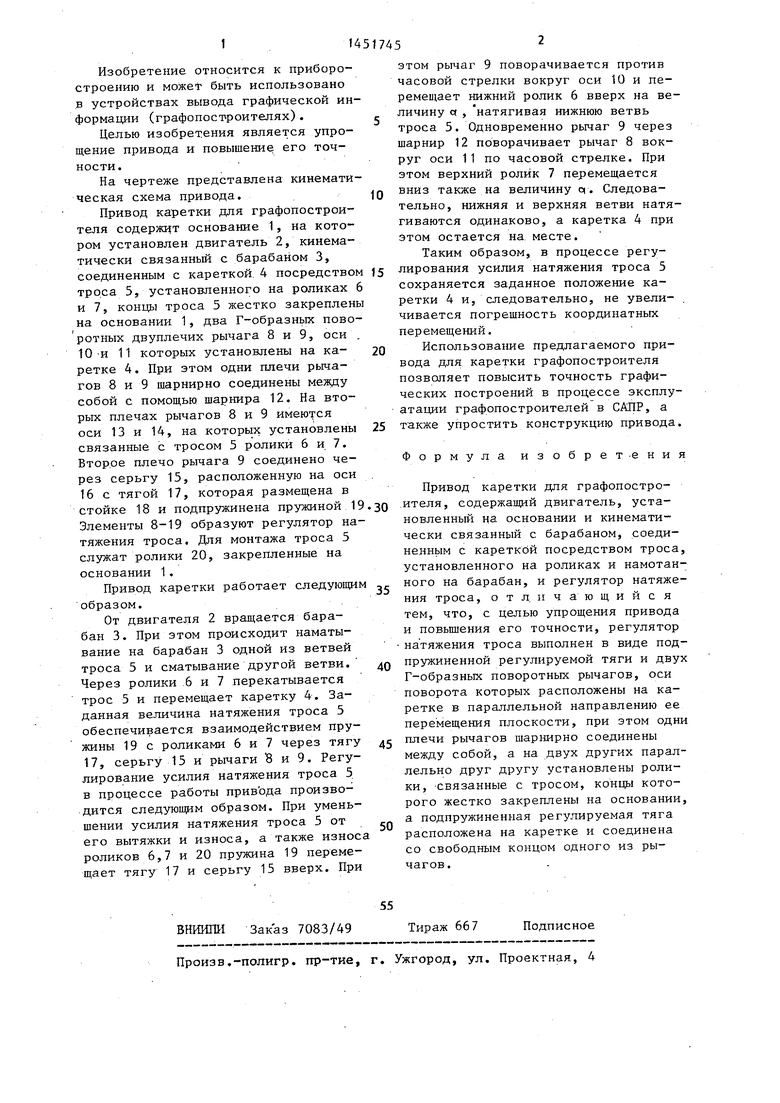
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатное устройство для графопостроителя | 1980 |
|
SU861946A1 |
| Графопостроитель | 1983 |
|
SU1150482A1 |
| Привод каретки графопостроителя | 1981 |
|
SU958858A1 |
| ОСНОВНЫЙ РЕГУЛЯТОР ТКАЦКОГО СТАНКА | 1991 |
|
RU2016935C1 |
| МЕХАНИЗМ ПЛАВНОГО ИЗМЕНЕНИЯ ДЛИНЫ ПЕТЕЛЬ ОДНОЦИЛИНДРОВОГО ЧУЛОЧНО-НОСОЧНОГО АВТОМАТА | 1991 |
|
RU2019595C1 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ НА ВЫСОТЕ | 1992 |
|
RU2018601C1 |
| Устройство для размотки рулонного материала | 1986 |
|
SU1315373A1 |
| Графопостроитель | 1982 |
|
SU1026014A1 |
| Регулятор скорости для прядильных и крутильных машин | 1960 |
|
SU141782A1 |
| КОМБИНИРОВАННЫЙ ТРЕНАЖЕР | 1998 |
|
RU2125902C1 |
Изобретение относится к области приборостроения и может быть использовано в устройствах вывода графической информации. Целью изобретения является упрощение привода и повышение его точности. Поставленная цель достигается тем, что в приводе каретки для графопостроителя, содержащем двигатель 2, установленньй на основании 1 и кинематически связан- ньш с барабаном 3, соединенным с кареткой 4 посредством троса 5, устаS новленного на роликах 6 и 7 и намотанного на барабан 3, и регулятор натяжения троса, последний выполнен в виде подпружиненной регулируемой тяги 17 и двух Г-образных поворотных рычагов 8 и 9, оси 10 и 11 которых расположены на каретке 4 в параллельной направлению ее перемещения плоскости, при этом одни плечи рычагов 8 и 9 шарнирно соединены между собой, а на двух других параллельно друг другу установлены ролики 6 и 7, связанные с тросом 5, концы которого жестко закреплены на основании 1, а подпружиненная регулируемая тяга 17 расположена на каретке 4 и соединена со свободным концом рычагов 9. Ре- .гулятор натяжения троса имеет прос тую конструкцию, в процессе регулирования усилия натяжения троса 5 сохраняется заданное положение каретки 4, следовательно, не увеличивается по- грешность координатных перемещений каретки 4. 1 ил. го (Л 01 | 4ih сл 
| КООРДИНАТОГРАФ | 0 |
|
SU364004A1 |
| Авторское свидетельство СССР № 759854, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
