Изобретение относится к области приборостроения и может быть использовано в графопостроителях для обеспечения координатных перемещений записывающей головки.
Известно координатное устройство графопостроителя 1, содержащее основание с направляющими, траверсу с каретками, связанными с тросовым приводом.
Недостатком указанного устройства является низкая точность, обусловленная накопленными погрещностями перемещения каждой из кареток. Эти погрешности возникают за счет износа троса и барабана привода, а также за счет ошибок при их изготовлении и монтаже.
Наиболее близким к предлагае.мому устройству по своей технической сушности и достигаемому результату является координатное устройство графопостроителя, содержащее основание с направляющими, траверсу с каретками, установленными на направляющих и связанными с приводом гибкой связью, выполненной в виде троса, установленного на роликах, и механизм коррекции, выполненный в виде разрезного барабана, сегменты которого взаимодействуют с конусной гайкой 2.
Недостатком указанного устройства является наличие циклической погрешности, обусловленной постоянством радиуса сегментов при изменении диаметра приводного барабана.
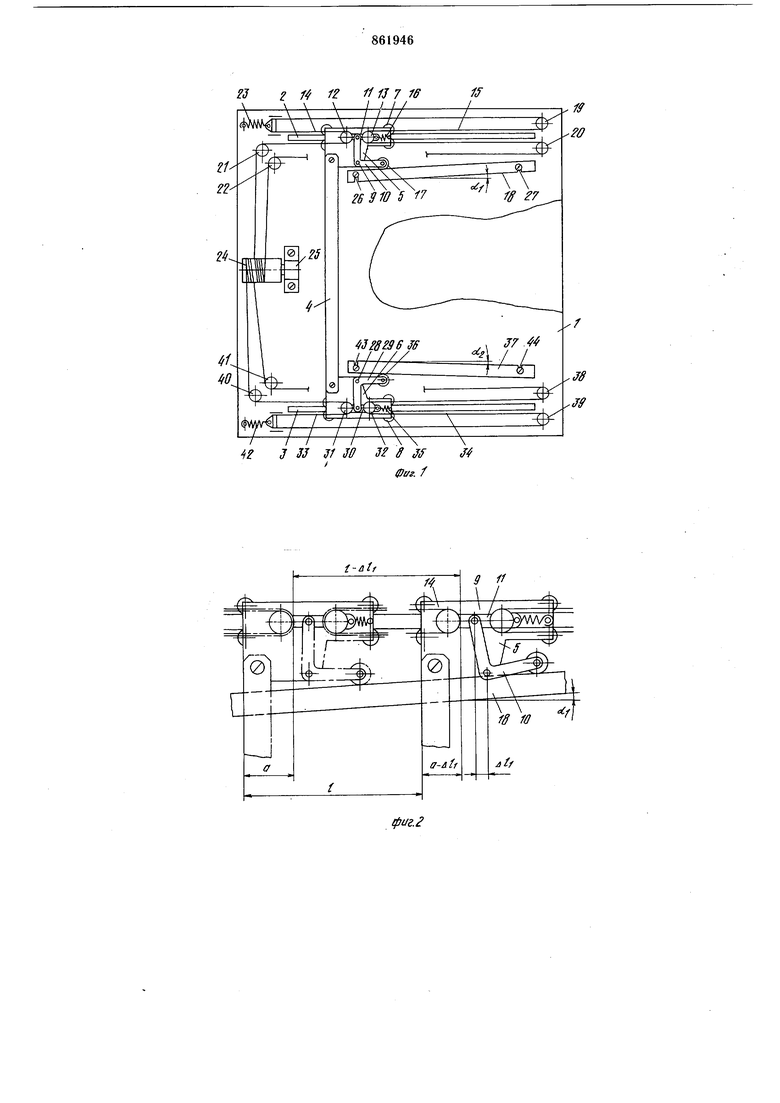
Целью изобретения является повыщение точности отработки координат. 5 Эта цель достигается тем, что механизм коррекции выполнен в виде планки и ша.рнирно закрепленного на каждой из кареток подпружиненного рычага, одно плечо которого кинематически связано с тросом, а дру10 гое контактирует с планкой, закрепленной на основании. Это обеспечивает дополнительное перемещение каретки и устранение суммарной погрешности ее перемещения. Предлагаемое координатное устройство содержит основание 1 (фиг. 1), укрепленные на нем направляющие 2 и 3, траверсу 4 с каретками 5 и 6, установленными в направляющих 2 и 3 с помощью роликов 7 и 8. На каретке 5 закреплена ось 9, на которой
20 с возможностью поворота установлен Г-образный двуплечий рычаг 10, имеющий на одном конце шарнирно соединенную с ним планку II, снабженную роликами 12 и 13, связанными с тросами 14 и 15, и подпру;25 жиненную пружиной 16. На втором конце
рычаг 10 имеет ролик 17, контактирующий
с корректирующей планкой 18 с помощью
пружины 16. Тросы 14 и 15 через роли:|КИ I9, 20, 21. и 22 связаны с натяжным
30 узлом 23 и с барабаном 24, приволимым
электродвигателем 25. Для крепления линейки 18 служат винты 26 и 27. На каретке 6 закреплена ось 28, на которой с возможностью поворота установлен Г-образный двуплечий рычаг 29, имеющий на одном конце шарнирно соединенную с ним планку 30, снабженную роликами 31 и 32, связанными с тросами 33 и 34 и подпружиненную пружиной 35. На втором конце рычаг 29 имеет ролик 36, контактирующий с корректирующей планкой 37 с помощью пружины 35. Тросы 33, 34 через ролики 38, 39, 40, 41 связаны с натяжным узлом 42 и с барабаном 24. Для крепления планки 37 служат винты 43 и 44.
Координатное устройство работает следующим образом.
Барабан 24 (фиг. 1) приводится во вращение двигателем 25. С помощью тросов 14, 15, 33 и 34 перемещаются каретки 5 и 6 и установленная на них траверса 4.
Для повыщения точности перемещения каретки 5 корректирующую нланку 18 поворачивают на угол Oi, необходимый для дополнительного перемещения каретки 5 с целью компенсации суммарной погрешности перемещения, закрепляют винтами 26 и 27. Например, если каретка переместилась на величину / - Л/1 (фиг. 2) вместо заданной величины /, то планку 18 поворачивают на угол а,. При этом планка 11 удерживается тросами 14 и 15, а рычаг 10 повора чивается и дополнительно перемещает в обратном направлении каретку 5 вместе с осью 9 на величину погрешности Л/,, изменяя расстояние а на а - А/, и обеспечивая каретке 5 заданное перемещение /.
Компенсация погрешности перемещения каретки 6 производится аналогичным образом.
При этом планку 37 (фиг. 1) поворачивают на угол а, необходимый для компенсации погрещности перемещения каретки 6. Таким образом, предлагаемое техническое
решение позволяет повысить точность координатного устройства путем индивидуальной регулировки точности координатных перемещений каждой из кареток траверсы независимо от погрешности изготовления диаметра барабана, диаметра троса, усилия его натяжения в различных ветвях и от погрещности расположения направляющих.
Формула изобретения
Координатное устройство графопостроителя, содержащее основание с направляющими, траверсу с каретками, установленными на направляющих и связанными с приводом гибкой связью, выполненной в виде троса, установленного на роликах, и механизм коррекции, отличающееся тем, что, с целью повыщения точности отработки координат, механизм коррекции выполнен в виде планки и шарнирно закрепленного на каждой
из кареток подпружиненного рычага, одно плечо которого кине.матически связано с тросом, а другое контактирует с планкой, закрепленной на основании.
Источники информации,
принятые во внимание при экспертизе
1.Патент США № 4.071.690, кл. 178-18, опублик. 1979.
2.Басов Е. П. и Абрамов В. Н. Графические регистрирующие устройства ЕС ЭВМ.
М., Статистика, 1977, с. 97-99 (прототип).
40
fJ г f4 Tf ///7 1в ff
III//
г1
222
L
w
.fg
20
,J8 ,Jff
I I I I I
f J // J/ 30 32 ff jf J
фаг. /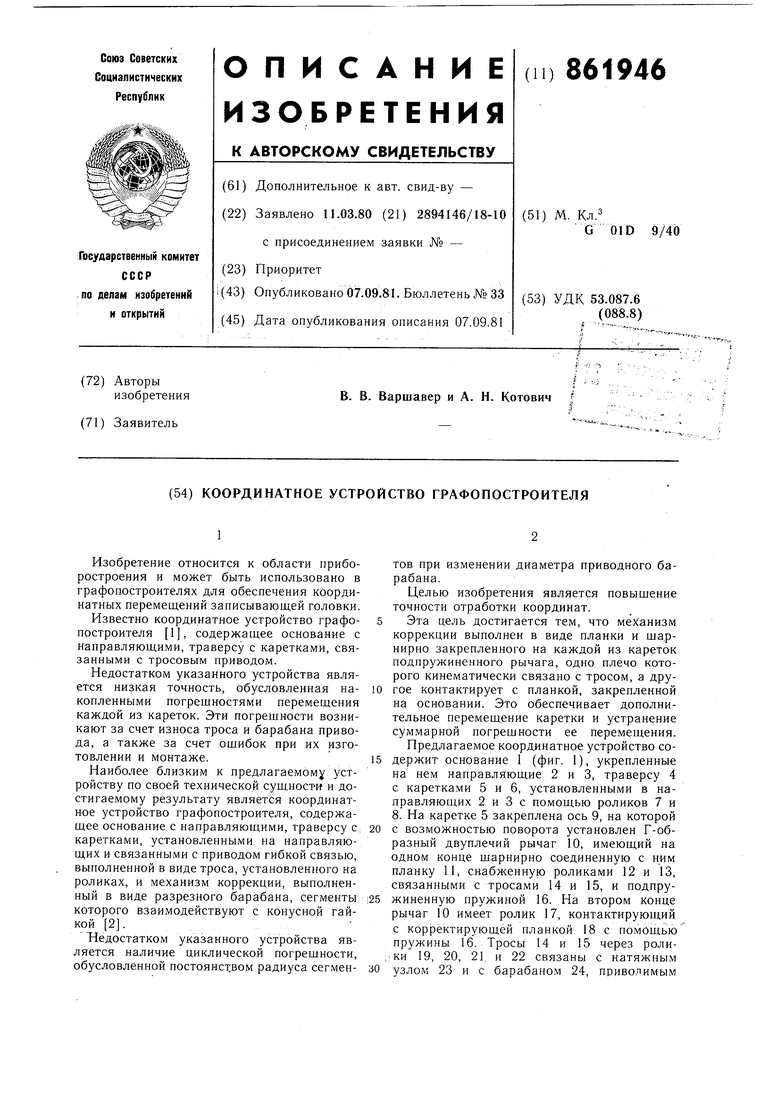
| название | год | авторы | номер документа |
|---|---|---|---|
| Графопостроитель | 1983 |
|
SU1150482A1 |
| Привод каретки для графопостроителя | 1987 |
|
SU1451745A1 |
| Графопостроитель | 1982 |
|
SU1026014A1 |
| Графопостроитель | 1979 |
|
SU838347A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1136193A1 |
| ГРАФОПОСТРОИТЕЛЬ | 1989 |
|
RU1743303C |
| Станок портального типа | 1982 |
|
SU1060418A1 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Узел прижимного ролика графопостроителя | 1989 |
|
SU1749709A1 |