Изобретение относится к приборостроению и может быть использовано для регистрации информации в графическом виде на носителе. Известно координатное устройство графопостроителя, содержащее основание с направляющими,, траверсу с каретками, установленными на направляющих и связанными с приводом гибкой СВЯЗЬЮ; вьшолненной в виде тро са, устаковленного на роликах, и механизм .коррекции, выполненный в виде разрезного барабана, сегменты которого взаимодейству от с конусной гайкой L13. Недостатком указанного устройства янпяется наличие циклической погpeuiiocTii, обусловленной постоянством радиусг1 сегментов при изменении диаметра Иг-шодного барабана. Наиболее близк1-гм к предлагаемому по технической сущности и достигаемому результату является графопостроитель, содержащий основание с направляющими, на которых установлена каретка с пш1гущ1м узлом, связанная с приводом гибкой связью, выполненной в виде троса, установленного на роликах, и механизм коррекции. MexaiiHSM коррекции выполнен- в виде поворотной планки и шарнирио закрепленного на калодой из кареток поднру/киненного рычага, одно плечо которого кинематическй связано с тросом, а j;p.yroe контактирует с планкой закрепленной на основании 2. Недостатками указанного устройства являются невысокие надежность и динамртческая точность при обработке координат. Это вызвано тем, что при повороте подпрухсиненных рычагов на своих осях происходит отклонение этой оси по дуге окружности. Так как это отклонение в большой степени зависит от величины хода каретки и неточности изготовления диаметров шкива и троса и может достигать несколь ких миллиметров, то при двюкении каретки значительно изменяется натяжение тросов, что приводит к их быстрой вытяжке, износу и замене, частой корректировке точности с помощью кор рекутир лощей планки. При этом какими бы ни были жесткими пружины рычагов и натяжных узлов, при реверсах элект родвигателей из-за разности.натяжения ведомой и ведущей ветвей троса появляется динамическая погрешность Кроме того, жесткость пружины узла натяжения влияет на износ тросов. Отклонение оси рычага по дуге окружности также вносит погрешность перемещения, которую надо учитывать при повороте корректирун)п5ей планки, и требует применения именно пружинного узла натяжения - компенсатора, работаЕощего в обе стороны по ходу движения каретки. Устройство конструктивно сложно. Необходи1 ость применения пружинного узла натяжения - компенсатора - заведомо снижает долговечность тросов и динамическую точность. Цель изобретения - повышение надежности и точности отработки координат. Поставленная цель достигается тем, что в графопостроителе, содержащем основание с направляюш.ими, на которых установлена каретка с пишущим узлом, связанная с приводом гибкой связью в виде троса, установленного на роликах, и механизм коррекции с поворотной планкой, ветвь троса, непосредственно связанного с кареткой, установлена на поворотной планке и закреплена на каретке с возможностью перемещения узла крепления относительно нее в направлении, перпендикулярном направляющей. Предлагаемое решениепозволяет значительно упростить кинематическую цепь механизма коррекции, исключить разность натяжения ведущей и ведомой ветвей троса, его интенсивный износ и колебания натяжения троса и пишущих узла, что в итоге обеспечивает повышение надежности, срока службы и точности отработки координат.. На фиг. 1 показан предлагаемьй графопостроитель (привод каретки); на фиго 2 -,схема коррекцииj на фиг. 3 - разрез А-А на фиг. 1. Графопостроитель содержит основание 1, на котором закреплены направляющая 2 и корректирующая планка 3. Планка 3 и ее ось 4 образуют механизм коррекции. На планке 3 установ-, лен электродвигатель 5 с барабаном 6, роликом 7 и тросом 8. Трос 8 связан с кареткой 9 узлом крепления в виде оси 10 с винтом 11. Ось 10 может перемещаться в пазу каретки 9 перпендикулярно направляющей 2. На каретке 9 установлен пингущий узел 12 с пером 13. Барабан 6 может смещаться
вдоль своей оси при наматывании троса 8. Конструкция шарнира в месте соединения троса 8 с кареткой 9 може быть любой и должна обеспечивать легкое его перемещение в пазу каретки в направлении, перпендикулярном направляющей 2. Электродвигатель 5 и барабан 6 образуют привод перемещения каретки 9..
Графопостроитель работает следующим образом.
Барабан 6 приводится во вращение электродвигателем 5, на который поступает входная информация. Трос 8 наматывается на барабан 6 и перемещает с помощью оси 10 каретку 9 с пишущим узлом t2 и пером 13 по напраляющей 2. При наматывании троса 8 барабан 6 смешается вдоль своей оси и трос 8 не меняет своего положения относительно оси барабана 6. Ось 10 свободно перемещается в пазу каретки 9 и передает ей движение вдоль направляющей 2.
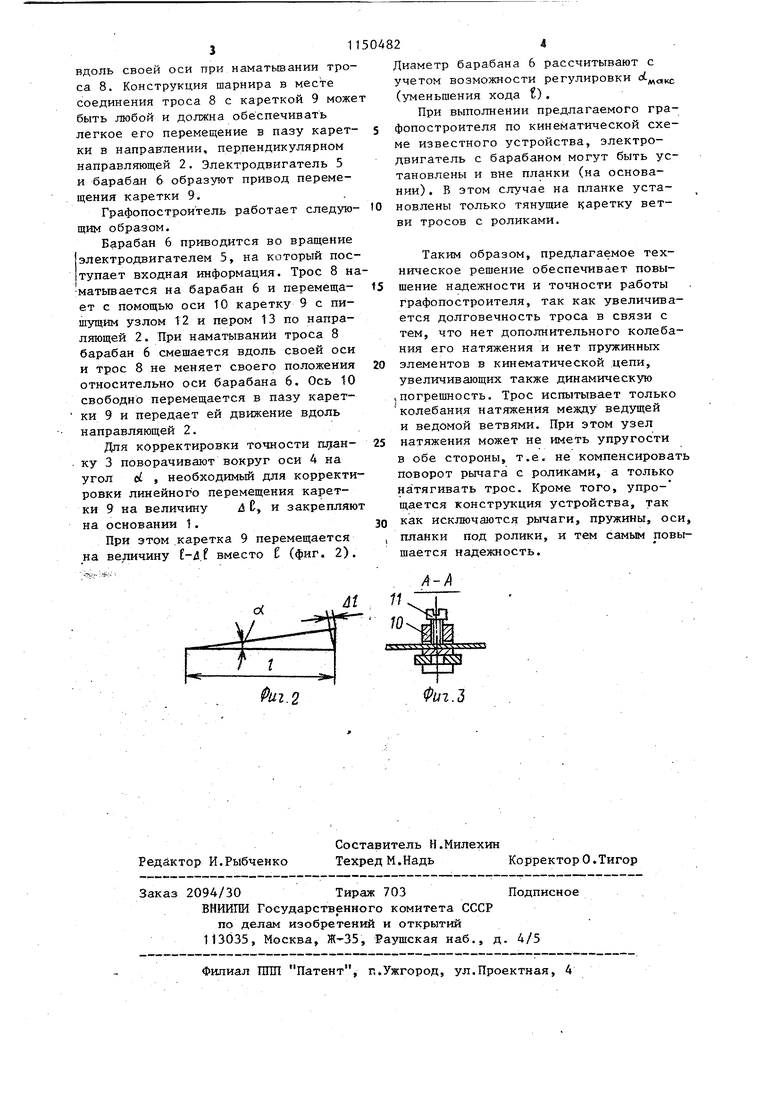
Для корректировки точности планку 3 поворачивают вокруг оси 4 на угол cL , необходимый для корректировки линейного перемещения каретки 9 на величину 4 С, и закрепляют на основании 1.
При этом .каретка 9 перемещается на величину t-&t вместо t (фиг. 2).
Диаметр барабана 6 рассчитывают с учетом возможности регулировки оС.
WOIKC (уменьшения хода f).
При выполнении предлагаемого графопостроителя по кинематической схеме известного устройства, электродвигатель с барабаном могут быть установлены и вне планки (на основании) . В этом случае на планке
устакаретку ветновлены только тянущие ви тросов с роликами.
Таким образом, предлагаемое техническое решение обеспечивает повышение надежности и точности работы графопостроителя, так как увеличивается долговечность троса в связи с тем, что нет дополнительного колебания его натяжения и нет пружинных элементов в кинематической цепи, увеличивающих также динамическую ,погрешность. Трос испытывает только колебания натяжения между ведущей и ведомой ветвями. При этом узел натяжения может не иметь упругости в обе стороны, т.е. не компенсироват поворот рычага с роликами, а только натягивать трос. Кроме того, упрощается конструкция устройства, так как исключаются рычаги, пружины, оси планки под ролики, и тем самым повышается надежность.
А-А
Г Ю Q
к
S
Qia. 7 У ..
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Координатное устройство для графопостроителя | 1980 |
|
SU861946A1 |
| Графопостроитель | 1983 |
|
SU1150483A1 |
| Графопостроитель" | 1978 |
|
SU779807A1 |
| Графопостроитель | 1990 |
|
SU1723439A1 |
| Привод каретки для графопостроителя | 1987 |
|
SU1451745A1 |
| Графопостроитель | 1981 |
|
SU1016675A1 |
| Привод каретки графопостроителя | 1981 |
|
SU958858A1 |
| Привод каретки графопостроителя | 1974 |
|
SU602781A1 |
| Графопостроитель | 1982 |
|
SU1026014A1 |
| Графопостроитель | 1979 |
|
SU877587A1 |
ГРАФОПОСТРОИТЕЛЬ, содержащий основание с направляющими, на которых установлена каретка с пишущим узлом, связанная с приводом гибкой связью в виде троса, установленного на роликах, и механизм коррекции с поворотной планкой, отличающийся тем,- что, с целью повышения надежности и точности отработки координат, ветвь троса с роликами, непосредственно связанного с кареткой, установлена на пово-ротной планке и закреплена на каретке с возможностью перемещения узла крепления относительно нее в направлении, перпендикулярном направляющей . Л |СЛ 4 00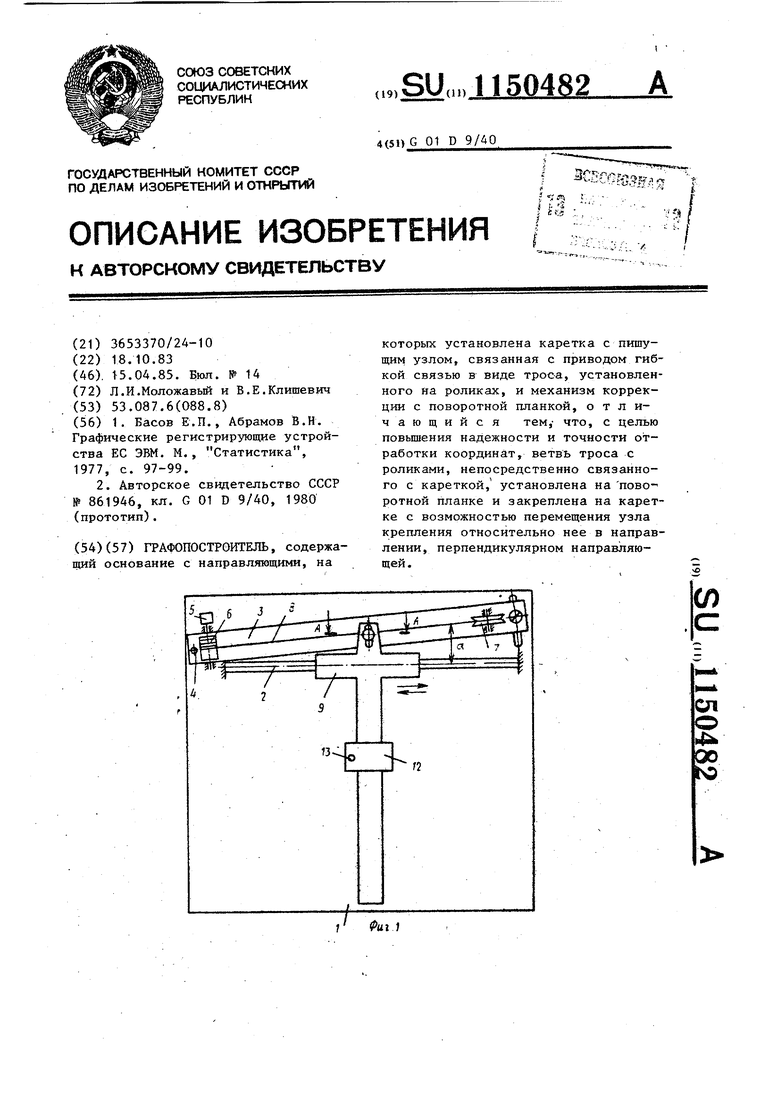
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Басов Е.П., Абрамов В.Н | |||
| Графические регистрирующие устройства ЕС ЭВМ | |||
| М., Статистика, 1977, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Координатное устройство для графопостроителя | 1980 |
|
SU861946A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
