(46) 15.06.93. Бюл. Р 22
(21)4105175/09 .
(22)04.06.86
(72) Л.А.Воревич, М.Н.Григорьев, Р.П.Сеньченко, Г.С.Цеханович, В.С.Шебшаевич и Ю.Д.Шишнан
.
(56)Сетевые спутниковые радионавигационные системы. Под ред. П.П.Дмитриева и В.С.Шебтаевича. И.: Радио
и связь, 1982, с.91.
Шкирятов В.В.Радионавигационные системы и устройства,М. 1Радио и связь, 1984, с. 127-128.
(54) ИЗМЕРИТЕЛЬ СКОРОСТИ И ДАЛЬНОСТИ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
(57)Изобретение относится к радиотехнике. Цель изобретения - повышение точности измерения. Измеритель скорости и дальности содержит измеритель квазискорости и квапидальности.
семь сумматоров, два ключа, дна интегратора и датчик начала движения. При неподвижном положении объекта в точке с известными координатами данное устр-во, установленное на этом объекте, работает в режиме стоянка. При движении объекта - в режиме движение. Измеритель обеспечивает в любом из этих режимов оценку параметров сигнала космического аппарата, т.е. оценки квазискорости и ква- зидапьности, в результате обработки смеси сигнала космического аппарата с помехами, поступающей на сигнальный -вход измерителя. Цель достигается за счет обеспечения фop rapoвaния дифференциальных поправок непосредственно в самом устр-ве в режиме стоянка и использования их в режиме движение. Даны ил. выполнения устр-ва. 2 ил.
сл

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2564936C1 |
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ | 1992 |
|
RU2018861C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| Следящая система | 1986 |
|
SU1427327A1 |
Изобретение относится к радиотехнике. Цель изобретения - повышение точности измерения. Измеритель скорости и дальности содержит измеритель квазискорости и квазидальности, семь сумматоров, два ключа, два интегратора и датчик начала движения. При неподвижном положении объекта в точке с известными координатами данное устр-во, установленное на этом объекте, работает в режиме "стоянка". При движении объекта - в режиме "движение". Измеритель обеспечивает в любом их этих режимов оценку параметров сигнала космического аппарата, т.е. оценки квазискорости и квазидальности, в результате обработки смеси сигнала космического аппарата с помехами, поступающей на сигнальный вход измерителя. Цель достигается за счет обеспечения формирования дифференциальных поправок непосредственно в самом устр-ве в режиме "стоянка" и использования их в режиме "движение". Даны ил. выполнения устр-ва. 2 ил.
I
Изобретение относится к области радиотехники, в частности к радионавигации, и может использоваться в радионавигационной аппаратуре для измерения навигапионнмх параметров сигналов систем сверхдальней радионавигации с космическим базированием излучателей навигационного паля.
Цель изобрете1гия - повышение точности измерения.
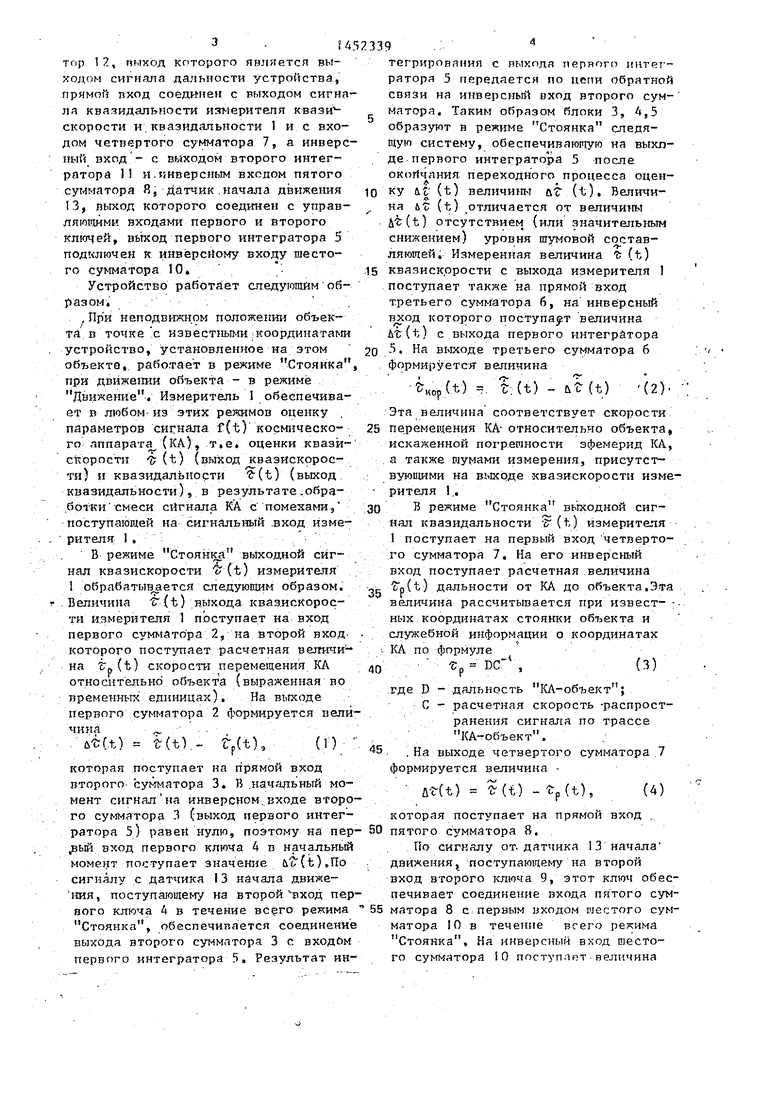
На фиг.1 и 2 показана структурная схема измерителя скорости и дальности диффбрснцилльяпй -мриглиионной системы.
Измсрптгль скорости и дальности :11аержит итмернт ль кпязискорости и
квазидал.ьности 1, последовательно соединенные первъй сумматор 2, второй сумматор 3, первый ключ 4 и первый интегратор 5, третий сумматор 6, выход которого является выходом сигнала скорости устройства, прямой вход соединен с выходом сигнала ква- зи корости измерителя квазискорости и квазидальности 1 и входом первого сумматора 2, а инверсный вход - с выходом первого интегратора 5 и инверсным входом второго сумматора 3, последовательно соедннен л 1е четпер- тый сумматор 7, пятый сумматор 8, второй ключ 9, шестой сумт-ьттор 10 и второй интегратор 1 1 , седьмой сумм-чФь
СП
to
00 со
со
тор 12, пыход которого является выходом сигнала дальности устройства, прямоГ5 вход соед1-тен с выходом сигналя квазидальности иямеритепя квази - скорости и.квазидальности 1 и с входом четвертого сумматора 7, а инверсный вход - с выходом второго интегратора П и.инверсным входом пятого сумматора Я, датчик.начал а движе1шя 13, выход которого соединен с управляющими входами первого и второго ключей, вьтход первого интегратора 5 подключен к инвёрсИому входу шестого cy {мaтo.pa 10,
Устройство работает следующим ofi- разом. . . .
Пр и неподвитагом положении объекта в точке с известньми :Koopдинaтa tи устройство, установленное на этом объекто, работает в режиме Стоянка при движении объекта - в режиме Движетше. Измеритель 1 обеспечивает R любом-из этик режимов оценку параметров сигнала f(t) космического аппарата(КА), т.е. оценки квазискорости Ь (t) (выход квазискорости) и квазидальности S Ct) (выход квазидальности), в результате .обработки -смеси сигнала КА с помехами, поступающей на сигнальный .вход изме- рителя 1. :, .
в режиме Стоянка выходной сигнал квазискорости «J (t) измерителя 1 обрабатывается следующим образом. .Величина cr(t) .выхода кваз.искорос- ти измерителя 1 п.Ьступает на вход первого сумматора 2, на второй вход которого поступает расчетная величина ir (t) сзсоростк перемещения КА относительно об7зект а (выраженная во временных единицах). На выходе первого cyMf-iaTopa 2 формируется величина
ut:(.t) t(t ).- t,(t), (Г)
которая поступает на прямой вход второго- сумматора 3. В .начальный момент сигнал на инверсном входе второго cyNiMaTopa 3 (выход первого интегратора 5) равей нулю, поэтому на пер- ;вьй вход первого ключа 4 в начальный момент поступает значение u 2 (t).no сигналу с датчика 13 начала движе- 1ШЯ, поступающему на второй вход первого ключа
..и
В
течение режима 55 матора 8 с.первым входом шестого сум Стоянка, обеспечивается соединение выхода второго сумматора 3 с входим первого интегратора 5. Результат инматора 10 в течение всего режима Стоянка. На инверсный вход шестого сумматора iO поступ;шт величина
тегрирования с иыхпда перного интет - раторя 5 передается по цепи обратной связи на инверсны вход второго сумматора. Таким образом блоки 3, А,5 образуют в режиме Стоянка следящую систему, обеспечивающую на выхл- де первого интегратора 5 после окончания переходного процесса оценку it (t) величины й Г (t). Величина ь/С (t) отличается от величи гы ut:(t) отсутствием (или значительным снижением) уровня шз,гмовой составляющей. Измеренная величина & (t) квязискррости с выхода измерителя 1 поступает также на прямой вход третьего сумматора 6, на инверсный вдсод которого поступает величина ht (t с выхода первого интегратора 5, На выходе третьего су1- матора 6 формируется величина
«op(t) .
t;(t) - bt (t)
с;
C2).
Эта величина соответствует скорости перемещения КА- относительно объекта, искаженной погрешности эфемерид КА, а также шумами измерения, присутст- вуюпщми на выходе квазискорости изме- рителя 1,,
В режиме Стоянка вьЬсодной сигнал квазидальности (t) измерителя 1 поступает на первый вход четвертого сумматора 7. На его инверсный вход поступает расчетная величина
о( Ь) дальности от КА до объекта.Эта г
величина рассчитьгоается при извест- :
ных координатах стоянки обтзекта и служебной информации о координатах КА по формуле
-ггр - DC
,
(3)
- дальность КА-объект ;
- расчетная скорость -распространения сигнала по трассе КА-объект.
выходе четвертого сумматора 7
формируется величина - (t) (t) - tp(t),
(4)
50
которая поступает на прямой вход . пятого сумматора 8,
По сигкялу от- датчика 13 начала движения поступающему на второй вход второго ключа 9, этот ключ обеспечивает соединение входа пятого сумматора 10 в течение всего режима Стоянка. На инверсный вход шестого сумматора iO поступ;шт величина
u.i:(t) с яыхода первого интегратора 5. На пыхпде шестого сумматора 10 образуется алгебраическая сумма величин itr (t) и ul; (t), которая интегрируется далее во втором интеграторе 1 1 , сигнал с выхода которого поступает на инверсный вход пятого сумматора 8. Таким образом, блоки (8,9, 10,11) образуют в режиме Стоянка следующую систему, обеспечивающую на выходе второго интегратора 1 после ок нчания переходного процесса оценку uf (t) величины trCt).
Измеренная величина С (t) квазидальности выхода измерителя 1 поступает на прямой вход седьмого сумматора 12, на выходе которого формируется сигнал
C(t (t.) - ut- (t).
кор
(5)
U)
В режиме Стоянка величина хор на втором выходе устройств а отражает (с точностью до погрешности эфемерид КА и шумовой составляющей вь1- хода (t) измерителя .1) расстоя-; нне от перемещающегося КА до непод- . Бижного объекта. Это достигнуто за счет использования дополнительной . информации oPi истинных координатах.
и скорости объётчта на стоянке. .
В начале режима Движение с датчика 13 по команде, поступающей на - вторые выходы ключей 4 и 9,.в течение всего режима движение первый ключ 4 отклт чает выход второго сумматора 3 от Еыхода первого интегратора 5, а второй ключ 9 отключает выход пятого сумматора 8 от прямого входа шестого сумматора 10, Тем самым разрывается прямая связь в следящих системах, формирующих оценку (t) выхода квазискорости измерителя 1 и оценку (t) квазидальности измерителя 1. Указанный разрыв прямой связи в следящих системах обеспечивает. .сохранениа в памяти ,пе-рвого интегратора 5 величины
.); формирование в режиме Движение на выходе второго интегратора 1 I велтгины . л 1 а - u(t) u(tj) + лг (tf)(t -,
.AB , . д.В
о Лв
- to ); t 5: t
(6)
где t - момент перехода из режима Стоянка в режим Движение,
Сигнал i; (t) с выхода измерителя I поступает н режиме Движение . на прямой вход третьего сумматора-6,
нл ei o ииверспьпЧ г:остун: ет и. топинля величина Z (t ) с пыхоп.; первого интегратора 5, В резул1 та7е на выходе третьего cy fмaтopa fi или на выходе сигнала скорости устройства формируется величина
J.op() (t) - A(tf), tvt.
Г (7)
Сигнал t (t) с выхода сигнала
квазидальности измерителя I поступает в режиме Движение на прямой вход седьмого сумматора 12, на ин- версньй вход которого поступает величида U сГ (t). На выходе седьмого
сумматора 12 (на выходе сигнала дальности устройства) формируется величина.
( Ь) (t) - ьг (t), ti t;J
op
о
(a)
Пред1{ожвнное решение позволяет
по сравнению с прототипом формировать дифференциальные поправки непосред- 25 ственно в самом устройстве в режиме
Стоянка и использовать в режиме . Движение, что обеспечивает авто- номность функционирования устройот- .ва измерения навигационных парамет- Q ров сигналов спутниковой РНС при работе с дифференциальными поправками.
о р м у л а изобретения
Измеритель скорости и дальности дифференциальной навигационной системы, включающий измеритель квазиско- , рости и квазидальности, отличаю Р1 и и с я тем, что, с целью
ловьш1ения точности измерения, введены песледова тельно соединенные первый сумматор, второй сумматор, первый ключ и первый интегратор, третий
сумматор, выход которого является
выходом сигнала скорости устройства,; прямой вход соединен с. выходом сигнала квазискорости измерителя квазискорости и кваякдальности и входом
первого сумматора, а инверсный вход -
с выходом интегратора и инверсным
входом второго сумматора, последовательно соединенные четверть й сумматор, пятый сутатор, второй ключ, шестой сумматор и второй интегратор, седьмой сумматор, выход которого является выходом сигнала дальност1г уст- . ройства, пряной вход соедин гн с пы- ходом сигнала квазидальнос- и измери71452339
теля квазискоростн и квяяидальностивыход которого -соединен с упрявляю- и с входом четвертого сумматора, я- Щими входами первого и второго клю- инверсный вход - с выходом второгочей, выход первого интегратора под- интегратора и инверсным входом пято-ключей к инверсному входу шестого го сумматора, датчик начала движения,.сумматора.
яшл
1
6
