I
Изобретение относится к строительным машинам, предназначенньм для динамического (ударного) уплотнения просадочньк и других сжимаемых грунтов путем сбрасывания грузов большой массы.
Целью изобретения является снижение трудоемкости.эксплуатации.
На фиг.1.показана предлагаемая машина, общий вид; на фиг„2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фигЛ| на фиг.4 - разрез В--В на фиг о 2,
Машина состоит из самоходного крана 1 со стрелой 2 грузового полиспаста 3 и вспомогательного канала 4, На стреле подвешена обойма 5,, в которой установлен верхний конец штанги 6 с закрепленными на ней упорами 7 и кронштейном 8, Канат 4 соеi
динен с остановом 9, имеющим штьфи 10с приспособлениями 11 для регулировки их длины. Крюковая обойма грузового полиспаста 3 соединена с гру- зозахватом 12, состоян1 1м из верхней плиты 13 и нижней плиты 14 с шар- нирно закрепленным на последней рычажным сцепным механизмом. На верхней плите 13 закреплены зинты 15 с. приспособлениями 16 регулирования их длины, стойки 17 с двуплечк ми рычагами 18 и пружинами: 19, причем Стойки имеют буртик 20, Рычажный сцепной механизм выполнен в виде рычажных захватов 21 с пружинами 22 и направляющими скосами 23, защёлок 24 с пружинами 25, рычагов 26, Верхняя 13 и нижняя 14 плиты стянуты пружинами 27 Груз 28 имеет пальцы 29
0
5
0
5
0
5
Машина работает .следуюш м образом.
В начале работы груз устанавливается над лиспом грунта. При этом штанга 6 опу1Г1ена на грунт, грузозах- ват 12с помощью подпружиненных ры- чажных захватов 21 удерживает груз 28 в нижнем положении (фиг.1, положение I). Защелки 24 под дейс.твием пружин 25 повернуты (фиг.З, положение II) и могут беспрепятственно проходить мимо упоров 7.
Величина требуемой высоты сбрасывания устанавливается с помощью останова 9, Для этого канатом 4 он поднимается до отметки, соответствующей требуемой высоте сбрасывания. После этого грузозахват 12 с грузом 28 поднимается полиспастом 3 до тех пор, пока.штыри 10 останова 9 не упрутся в защелки 24. Последние под действием веса останова 9 поворачи- ваются (фиг.З, положение III) и канат 4 ослабляется В. это время оператор останавливает подъем полиспаста 3 на заданной высоте сбрас1 ;вания.
Перенавеска груза на штангу 6, последующее сбрасывание груза со штанги, снятие грузозахвага 12 со штанги 6 и опускание грузоз ахвата 12 для стыковки с упавшим грузом 28 осуществляются путем включения грузового пэлиспаста 3 на опускание. При этом все опера ции осуществляются автоматически при ослабленном канате 4,
. Сначала грузозахват 12 садится на штангу 6 путем опирания повернутых защелок 24 на упоры 7. При этом вес груза 28 передается ал штангу 6 и стрела 2 разгружается.
.Нижняя плита 14 с грузом 28 останавливается на штанге 6, а верхняя плита 13 продолжает двигаться вниз до тех пор, пока двуплечие рычаги 18 не упрутся в плечи рычажных захватов 21. При дальнейшем опускании верхней плиты 13 двуплечие рычаги 18 под действием веса верхней плиты и пружин 27 поворачивают рычажные захваты 21 (фиг.4, положение IV) и груз 28 начинает свободное падение
на грунт.
После сбрасывания груза 28 пружины 27 несколько приподнимают нижнюю плиту 14, двуплечие рычаги 18 занимают положение V ( фиг.4), а рычажны захваты 21 под действием пружин 22 - первоначальное положение.
Одновременно освобождаются защел- ки 24 от контакта с упорами 7, а винты 15 через рычаги 26 поворачивают защелки 24 (фиг.З, положение VI) в исходное состояние, при котором защелки не контактируют с упорами 7, приподняв при этом останов 9. Регулировка штырей 10 и винтов 15 осуществляется приспособлениями 11 и 16. При дальнейшем опускании полиспаста 3 с грузозахватом 12 он свободно проходит мимо упоров 7, а останов 9 зависает на канате 4.
Когда грузозахват 12 достигает лежащего на грунте груза 28, рьиаж- ные захваты 21 за счет контакта направляющих скосов 23 с пальцами 29 отклоняются, а затем пружинами 22 захватывают пальцы 29. В этот момен опускание полиспаста 3 прекращается и груз 28 готов для подъема с помощ грузозахвата 12.
При подъеме полисп аста 3 под действием веса груза 28 растягиваются пружины 27. Верхняя плита 13 со стойками 17 поднимается. Двуплечие рычаги 18, контактируя с рычажными захватами 21, свободно поворачивают растягивая пруткины 19, и занимают исходное положение VII (фиг.4). Нижняя плита 14 зависает на буртиках 20 стоек 17. В таком положении груз 28 поднимается и далее цикл повторяется
При уплотнении грунта происходит некоторая его просадка под штангой 6 и ее опускание в обойме 5,
Для перемещения машины на новое место уплотнения груз 28 поднимается и удерживается полиспастом 3 над
е
, 10
поверхностью грунта, а штанга 6 приподнимается над грузом. Для зтого вспомогательным канатом 4 останов 9 поднимается, упирается в кронпггейн 8 на штанге 6, и штанга приподнимается над грунтом, перемещаясь в обойме 5. Далее машина перемещаетс я на новое место уплотнения, штанга 6 опускается на грунт и машина готова для работы.
Изобретение обеспечивает снижение трудоемкости эксплуатации. При этом -не требуется дополнительный ручной 15 механизм для сбрасывания груза со штанг. Вся система управления процессом упрощается за счет использования вспомогательного каната как для остановки груза на заданной высоте, так и для подъема штанги при переходе машины на новое место уплотнения.
Формула изобретения
20
5
0
5
0
5
0
5
1, Машина для динамического уплотнения грунтов, содержащая подвешенную к стреле базовой машины обойму, на- пpaвJ яющy o штангу, верхний конец которой установлен в обойме, трамбовку, связанную канатным приводом со стрелой базовой машины, грузозахват с верхней и нижней плитами и шарнир- но закрепленным на последней рычажным сцеп.ным механизмом, отличающаяся тем, что, с целью снижения трудоемкости зксплуатации, она снабжена сгибающим блок стрелы вспомогательным канатом и смонтированным на нем остановом, имекндим штьфи с приспособлением регулирования их длины, размещенным над грузозахватом, закрепленными на штанге порами, расположенными на верхней плите стойками с подпружиненными двуплечими рычагами, шарнирно установ- ленньгми на нижней плите подпружиненными защелками, рычажный сцепной механизм выполнен в виде подпружиненных и обращенных в противоположные стороны рычажных.захватов с кулач- , ками в верхней части и направляющими скосами в нижней, контактирующих с пoдпp Dкинeнными двуплечими рычагами, а подпружиненные защелки контактируют с упорами на направляющей штанге и штырями останова, причем верхние и нижние плиты грузозахвата соединены между собой посредством упругих элементов, .
514528816
2, Машина по п,1, о.т л.и ч а ю -кронштейном, контактирующим с остано;щ а я с я тем, что она снабжена за-вом.
крепленным,, на направляющей штанге

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1659588A1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1491958A1 |
| Устройство для уплотнения грунта | 1985 |
|
SU1323657A1 |
| Устройство для уплотнения грунта | 1985 |
|
SU1234520A1 |
| Устройство для вытрамбовывания котлованов | 1984 |
|
SU1260442A1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092656C1 |
| Устройство для вытрамбовывания котлованов | 1982 |
|
SU1148952A1 |
| ГРЕЙФЕРВ Г1 Т 5«•^-г^^пгОТй^ а !if=:jLJ 11ч | 1972 |
|
SU414374A1 |
| Устройство для уплотнения грунта | 1987 |
|
SU1470862A1 |
| Штанговый токоприемник | 1976 |
|
SU770868A1 |


Изобретение относится к строительным машинам, предназначенным для динамического уплотнения преимущест- йенно просадочных и других сжимаемых грунтов путем сбрасьгаания груза большой массы. Цель изобретения - снижение трудоемкости эксплуатации устройства. Устройство состоит из базо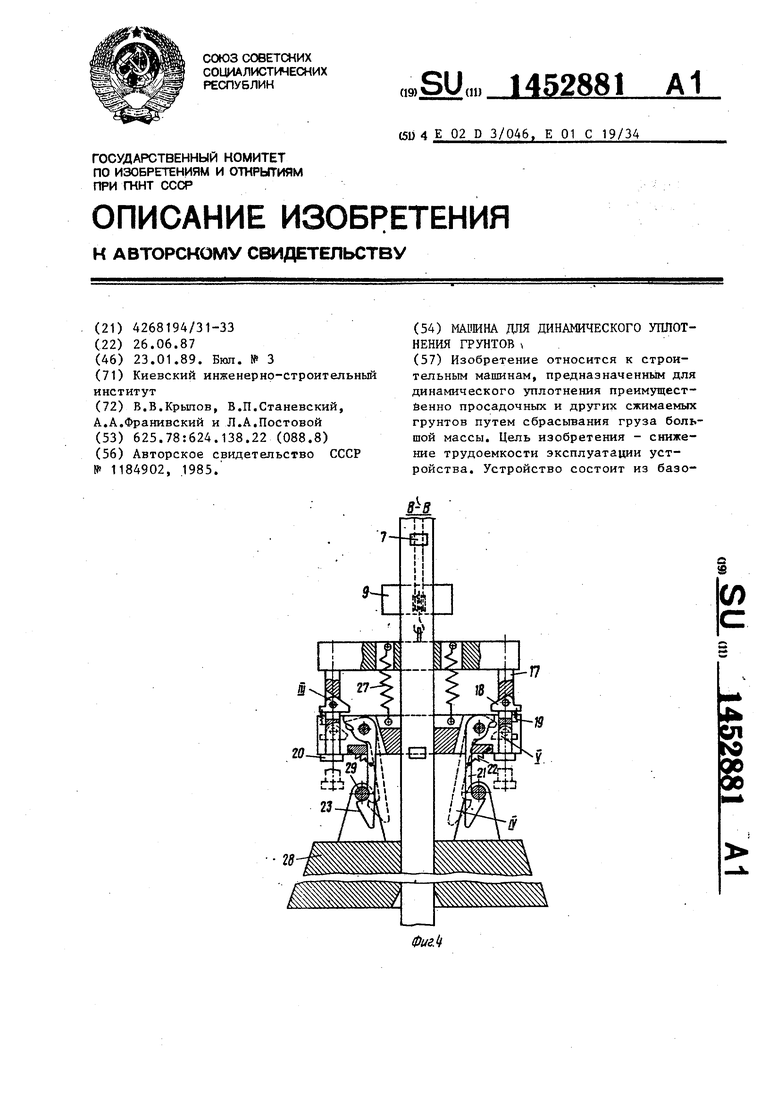
/ // // /// / / / / / / / / / / / / / Х х
Фь/гЛ
S7
Я
| Авторское свидетельство СССР № 1184902, .1985. |
