сл
;о
со
СП
оо
состоит из телескопической направляющей, установленной на базовой машине основного канатного привода с полиспастом подъема каретки 11 с трамбовкой 15. Полиспаст подъема каретки 11 составляют блоки 12, установленные на каретке 11, блоки 13, установленные в обойме А, укрепленной на нижней части телескопической направляющей 5, и огибающий эти блоки канат 14. Канат 14 одним концом присоединен к лебедке основного подъема базовой машины, а другим прикреплен к нижнему концу верхней час- сти телескопической направляющей 3. Трамбовка 13 концентрично расположен
относительно нижней части телескопической направляющей 5, имеющей в своем основании подвижную пяту
10, соединенную дополнительным канатным приводом с полиспастом подъ- ема нижней части телескопической направляющей 5, который выполнен в виде установленных на осях в верхней
части телескопической направляющей 3 и в обойме 4 блоков 6 и 7, огибаемых канатом 8. Канат 8 крепится одним концом к барабану лебедки дополнительного подъема базовой машины, а другим - последовательно к оттяжному грузу 9 и пяте 10. 1 з.п. ф-лы, 6 ил.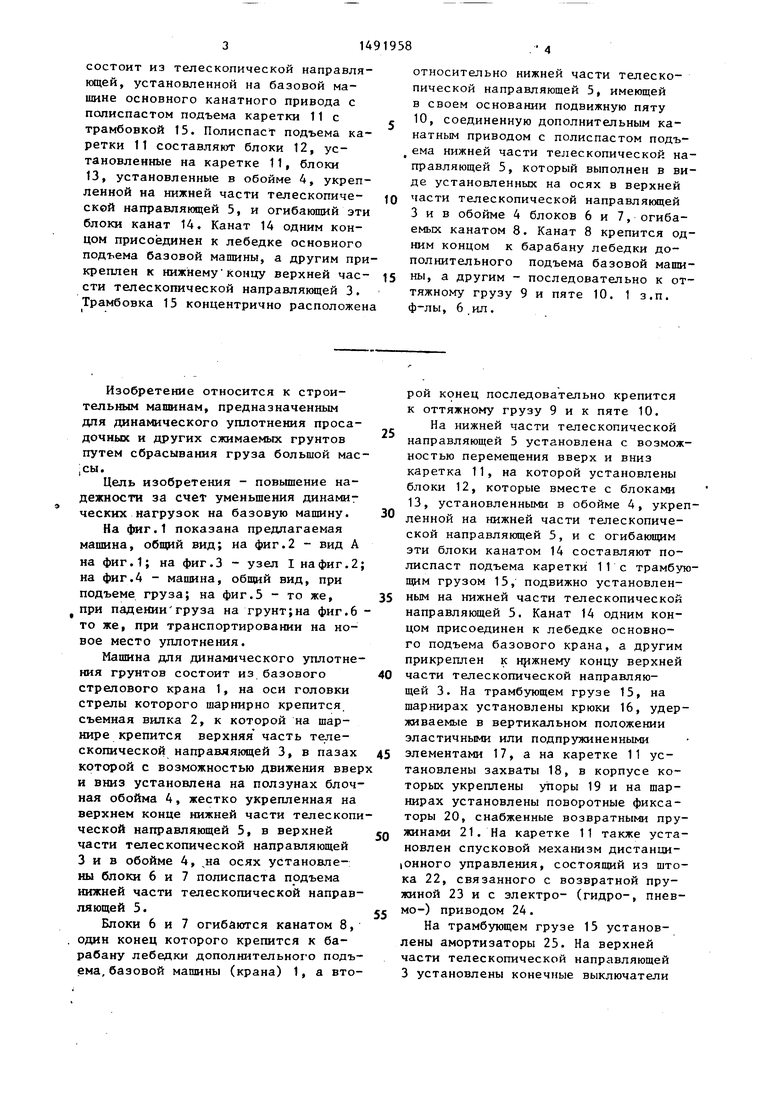
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического уплотнения грунтов | 1986 |
|
SU1469019A1 |
| Устройство для вытрамбовывания котлованов | 1990 |
|
SU1756458A1 |
| УСТРОЙСТВО ДЛЯ ВЫТРАМБОВЫВАНИЯ КОТЛОВАНОВ | 1991 |
|
RU2036270C1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1452881A1 |
| Устройство для уплотнения грунта | 1987 |
|
SU1470862A1 |
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1650874A1 |
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1634758A1 |
| БАШЕННЫЙ КРАН | 1966 |
|
SU179445A1 |
| КРАН-ТРУБОУКЛАДЧИК | 2014 |
|
RU2571312C1 |

Изобретение относится к строительным машинам, предназначенным для динамического уплотнения просадочных и других сжимаемых грунтов путем сброса груза большой массы. Цель изобретения - повышение надежности за счет уменьшения динамических нагрузок на базовую машину. Машина для динамического уплотнения грунта состоит из телескопической направляющей, установленной на базовой машине основного канатного привода с полиспастом подъема каретки 11 с трамбовкой 15. Полиспаст подъема каретки 11 составляют блоки 12, установленные на каретке 11, блоки 13, установленные в обойме 4, укрепленной на нижней части телескопической направляющей 5, и огибающий эти блоки канат 14. Канат 14 одним концом присоединен к лебедке основного подъема базовой машины, а другим прикреплен к нижнему концу верхней части телескопической направляющей 3. Трамбовка 15 концентрично расположена относительно нижней части телескопической направляющей 5, имеющей в своем основании подвижную пяту 10, соединенную дополнительным канатным приводом с полиспастом подъема нижней части телескопической направляющей 5, который выполнен в виде установленных на осях в верхней части телескопической направляющей 3 и в обойме 4 блоков 6 и 7, огибаемых канатом 8. Канат 8 крепится одним концом к барабану лебедки дополнительного подъема базовой машины, а другим-последовательно к оттяжному грузу 9 и пяте 10. 1 з.п. ф-лы, 6 ил.
25
Изобретение относится к строительным машинам, предназначенным для динамического уплотнения проса- дочных и других сжимаемых грунтов путем сбрасывания груза большой массы.
Цель изобретения - повьппение надежности за счет уменьшения динамических нагрузок на базовую машину. 30
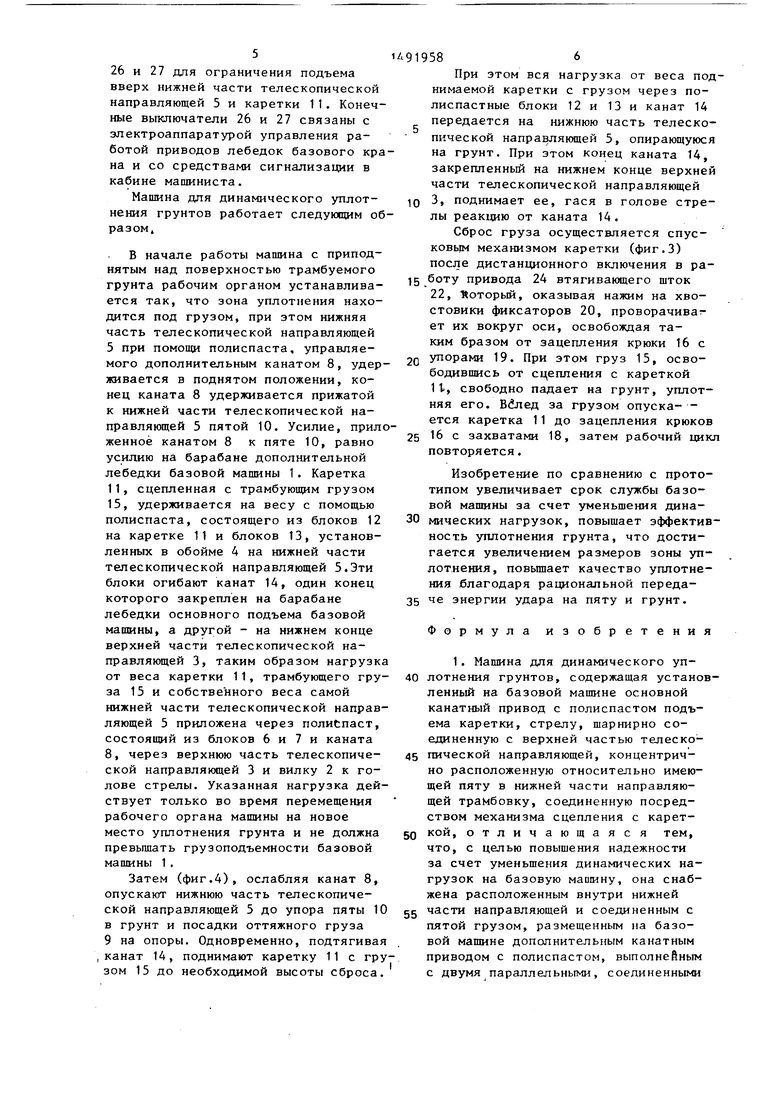
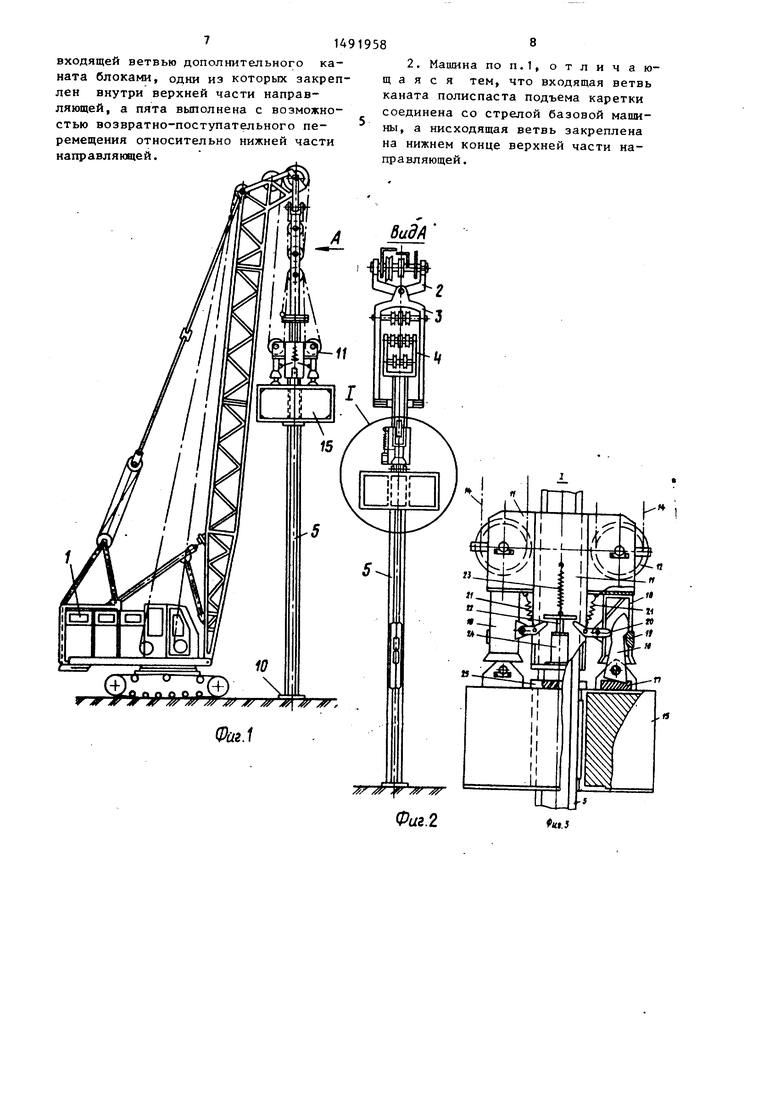
На фиг.1 показана предлагаемая машина, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - узел I на фиг.2; на фиг.4 - машина, общий вид, при подъеме груза; на фиг.З - то же, 35 при падении груза на трунт;на фиг.6 - то же, при транспортировании на новое место уплотнения.
Машина для динамического уплотнения грунтов состоит из базового 40 стрелового крана 1, на оси головки стрелы которого шарнирно крепится съемная вилка 2, к которой на шарнире крепится верхняя часть телескопической направляющей 3, в пазах 45 которой с возможностью движения вверх и вниз установлена на ползунах блочная обойма 4, жестко укрепленная на верхнем конце нижней части телескопической направляющей 3, в верхней д части телескопической направляющей 3 и в обойме 4, на осях установлены блоки 6 и 7 полиспаста подъема нижней части телескопической направляющей 3.55
Блоки 6 и 7 огибаются канатом 8, один конец которого крепится к барабану лебедки дополнительного подъема, базовой машины (крана) 1, а вто5
0
5
0 5
рой конец последовательно крепится к оттяжному грузу 9 и к пяте 10.
На нижней части телескопической направляющей 5 установлена с возможностью перемещения вверх и вниз каретка 11, на которой установлены блоки 12, которые вместе с блоками 13, установленными в обойме 4, укрепленной на нижней части телескопической направляющей 5, и с огибающим эти блоки канатом 14 составляют полиспаст подъема каретки 11 с трамбующим грузом 15, подвижно установленным на нижней части телескопической направляющей 3. Канат 14 одним концом присоединен к лебедке основного подъема базового крана, а другим прикреплен к Щ1жнему концу верхней части телескопической направляющей 3. На трамбующем грузе 15, на шарнирах установлены крюки 16, удерживаемые в вертикальном положении эластичными или подпружиненными элементами 17, а на каретке 11 установлены захваты 18, в корпусе которых укреплены упоры 19 и на шарнирах установлены поворотные фиксаторы 20, снабженные возвратными пружинами 21. На каретке 11 также установлен спусковой механизм дистанци- (Онного управления, состоящий из штока 22, связанного с возвратной пружиной 23 и с электро- (гидро-, пнев- МО-) приводом 24.
На трамбующем грузе 13 установлены амортизаторы 23. На верхней части телескопической направляющей 3 установлены конечные выключатели
26 и 27 для ограничения подъема вверх нижней части телескопической направляющей 5 и каретки 11. Конечные выключатели 26 и 27 связаны с электроаппаратурой управления работой приводов лебедок базового крана и со средствами сигнализации в кабине машиниста.
Машина для динамического уплотнения грунтов работает следующим образом.
В начале работы машина с приподнятым над поверхностью трамбуемого грунта рабочим органом устанавливается так, что зона уплотнения нахоится под грузом, при этом нижняя часть телескопической направляющей 5 при помощи полиспаста, управляемого дополнительным канатом 8, удерживается в поднятом положении, конец каната 8 удерживается прижатой к нижней части телескопической направляющей 5 пятой 10. Усилие, приложенное канатом 8 к пяте 10, равно усилию на барабане дополнительной ебедки базовой машины 1. Каретка 11, сцепленная с трамбующим грузом 15, удерживается на весу с помощью полиспаста, состоящего из блоков 12 на каретке 11 и блоков 13, установенных в обойме 4 на нижней части телескопической направляющей 5.Эти блоки огибают канат 14, один конец которого закреплен на барабане ебедки основного подъема базовой машины, а другой - на нижнем конце верхней части телескопической направляющей 3, таким образом нагрузка от веса каретки 11, трамбующего груза 15 и собственного веса самой нижней части телескопической направяющей 5 приложена через полиспаст, состоящий из блоков 6 и 7 и каната 8, через верхнюю часть телескопической направляющей 3 и вилку 2 к голове стрелы. Указанная нагрузка действует только во время перемещения рабочего органа машины на новое место уплотнения грунта и не должна превьш1ать грузоподъемности базовой машины 1 .
Затем (фиг.4), ослабляя канат 8, опускают нижнюю часть телескопической направляющей 5 до упора пяты 10 в грунт и посадки оттяжного груза 9 на опоры. Одновременно, подтягивая канат 14, поднимают каретку 11 с груом 15 до необходимой высоты сброса.
При этом вся нагрузка от веса поднимаемой каретки с грузом через по- лиспастные блоки 12 и 13 и канат 14 передается на нижнюю часть телескопической направляющей 5, опирающуюся на грунт. При этом конец каната 14, закрепленный на нижнем конце верхней части телескопической направляющей
Q 3, поднимает ее, гася в голове стрелы реакцию от каната 14.
Сброс груза осуществляется спусковым механизмом каретки (фиг.З) после дистанционного включения в ра5 боту привода 24 втягивающего шток 22, Ноторый, оказывая нажим на хвостовики фиксаторов 20, проворачива:- ет их вокруг оси, освобождая таким бразом от зацепления крюки 16 с
Q упорами 19. При этом груз 15, освободившись от сцепления с кареткой It, свободно падает на грунт, уплотняя его. В(лед за грузом опуска- - ется каретка 11 до зацепления крюков
5 16 с захватами 18, затем рабочий цикл повторяется.
Изобретение по сравнению с прототипом увеличивает срок службы базовой машины за счет уменьшения дина0 мических нагрузок, повышает эффективность уплотнения грунта, что достигается увеличением размеров зоны уплотнения, повьшает качество уплотнения благодаря рациональной переда5 че энергии удара на пяту и грунт.
Формула изобретения
5 части направляющей и соединенным с пятой грузом, размещенным на базовой машине дополнительным канатным приводом с полиспастом, выполнейным с двумя параллельными, соединенными
1А91958
входящей ветвью дополнительного каната блоками, одни из которых закреплен внутри верхней части направляющей, а пята вьшолнена с возможностью возвратно-поступательного перемещения относительно нижней части направляющей.
W
8
Вид А
/ / ir/ 9У :fy
Фаг.2
«.5
/// И ///
Фиг.
Составитель О.Шишова Редактор О.Головач Техред А.Кравчук Корректор М.Самборская
Заказ 3838/31
Тираж 589
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фм.6
Подписное
| Авторское свидетельство СССР № 1184902, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
