Изобретение относится к строительным машинам, предназначенным для динамического уплотнения просадочных грунтов путем сбрасывания на них трамбовки большой массы.
Целью изобретения является повышение надежности в работе машины.
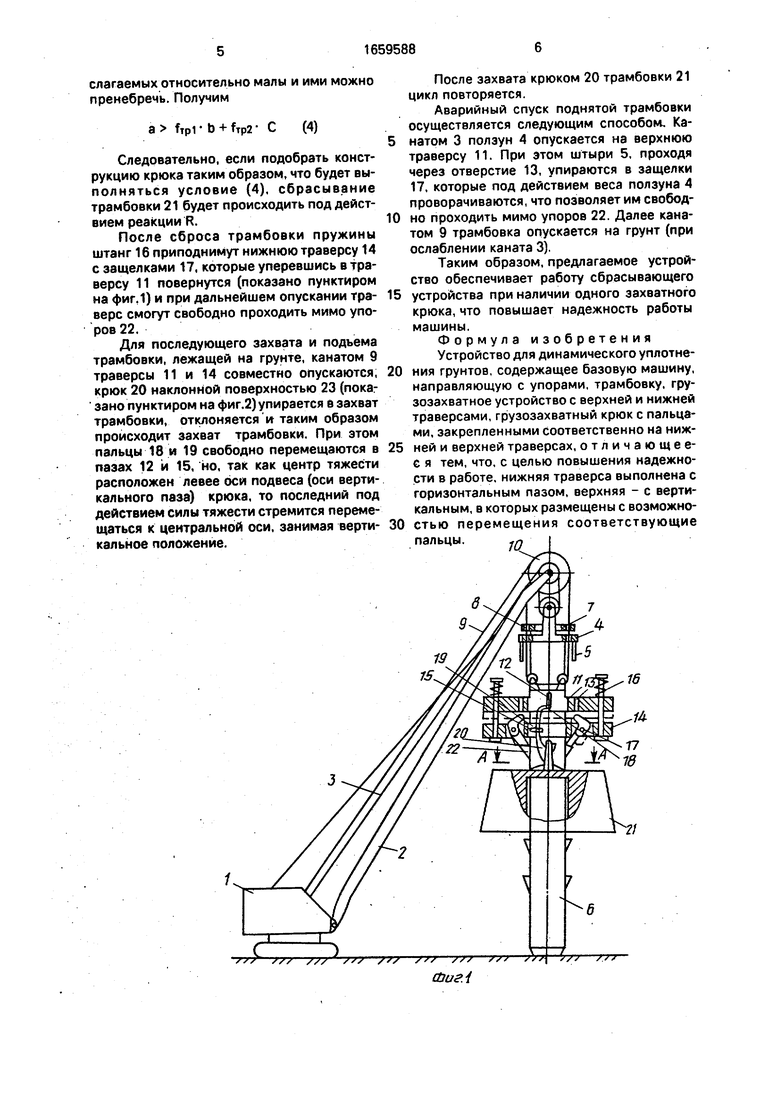
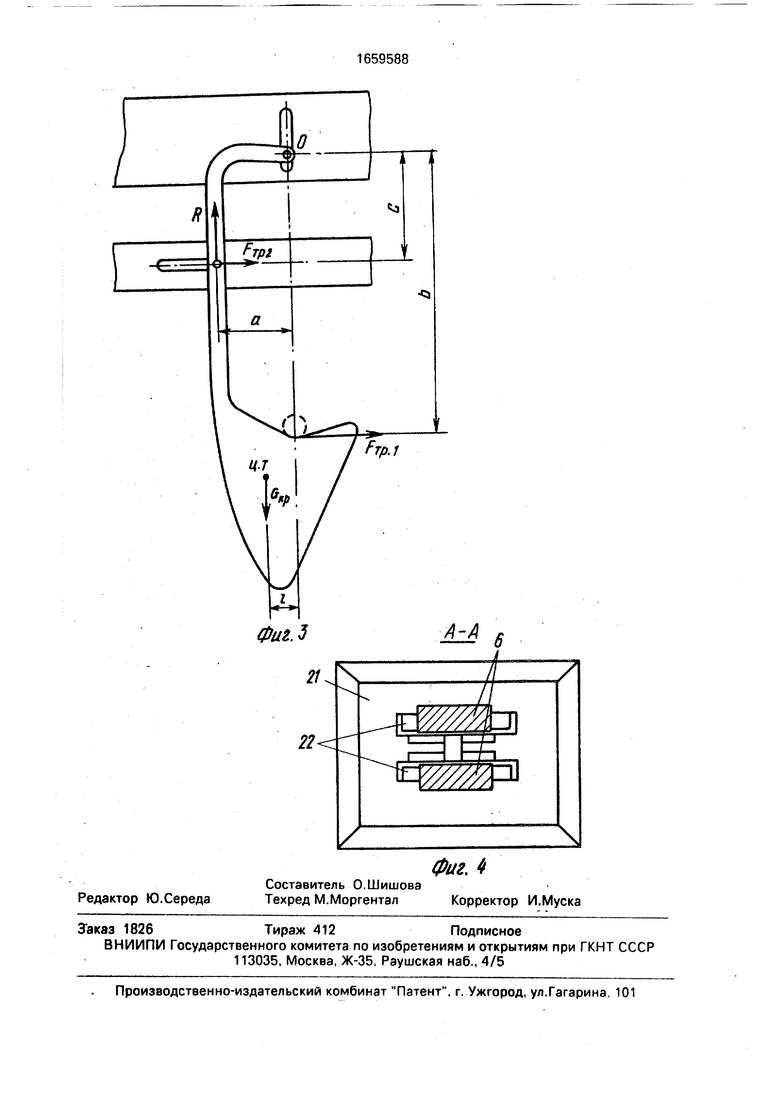
На фиг.1 схематично показано предлагаемое устройство; на фиг.2 - устройство и крепление грузоподъемного крюка; нафиг.З - силы, действующие на грузоподъемный крюк в момент сбрасывания; на фиг.4 - разрез А-А на фиг.1.
Машина для динамического уплотнения грунта состоит из базовой машины 1 со стрелой 2. На стреле 2 при помощи вспомо-1 гательного каната 3 подвешен ползун 4 со штырями 5, имеющий возможность перемещаться по направляющей стойке 6. Сверху на стойке закреплена плита 7. В ползуне 4 и плите 7 имеются отверстия 8, в которых расположены две ветви грузового каната 9, огибающего блоки 10 на стреле 2. Грузовой канат 9 связан с верхней траверсой которой имеются вертикальный паз 12 и отверстия 13.
Нижняя траверса 14, в которой имеется горизонтальный паз 16, связана с верхней траверсой 11 при помощи подпружиненных штанг 16. На нижней траверсе 14 шарнирно закреплены подпружиненные защелки 17. В вертикальном пазу 12 и горизонтальном пазу 15 расположены пальцы 18 и 19 грузоподъемного крюка 20, на котором Подвешена трамбовка 21. Направляющая стойка 6 имеет упоры 22 для фиксации траверсы 14 при помощи защелок 17, а крюк имеет наклонную поверхность 23.
Устройство работает следующим образом.
Направляющую стойку 6 с приподнятой над грунтом при помощи грузового каната 9 трамбовкой 21 вспомогательным канатом 3 и стрелой 2 устанавливают на грунт в месте уплотнения. При этом ползун 4 упирается в плиту 7 для подъема стойки 6, а грузовой крюк 20 с грузом висит на верхней траверсе, взаимодействуя пальцем 18 с основанием паза 12. При этом вес трамбовки 21 удерживает крюк 20 в вертикальном положении, сжав пружины штанг 16.
Затем трамбовка 21 канатом 9 поднимается до требуемой высоты сброса. При этом стойка 6 свободно опирается на грунт и удерживается в вертикальном положении благодаря натянутым ветвям каната 9, проходящим в отверстиях 8. а подпружиненные защелки 17, свободно отклоняясь, прощел- кив ают по упорам 22.
Сбрасывание трамбовки 21 осуществляется следующим образом. При отпускании трамбовки с траверсами 11 и 14 канатом 9 защелки 17 упираются в упоры 22. Вестрамбовки передается на стойку 6, чем исключается динамическое воздействие на базовую машину в момент сброса.
При дальнейшем ослаблении грузового каната 9 верхняя траверса 11 начинает
сближаться с нижней траверсой 14 благодаря воздействию силы тяжести траверсы 11 и подпружиненных штанг 16. Верхний палец 18 перемещается вверх по вертикальному пазу 12 траверсы 11. В результате этого
трамбовка 21 остается подвешенной на грузоподъемном крюке 20 только при помощи пальца 19. В точке подвеса возникает вертикальная реакция R Хс(фиг.З), раёная весу трамбовки 21. Момент R -а этой реакции
отклоняет крюк 20, освобождая при этом трамбовку 21. Падая на грунт, трамбовка производит его уплотнение.
На фиг.З изображены силы, действующие на грузоподъемный крюк 20 в момент
перед началом сбрасывания трамбовки 21. Условно будем считать силу тяжести крюка Gup приложенной в центре тяжести крюка на расстоянии I от оси подвеса, реакция R, равная весу трамбовки 21, приложена вточке подвеска крюка 19 к нижней траверсе 12 на расстоянии а от центра вращения крюка. В этой же точке приложена сила трения FTp2. вызванная сопротивлением перемещению пальца 18 по горизонтальному пазу 14, сила
создает вращающий момент относительно центра вращения крюка 0 на плече С. Сила FTpi, вызванная взаимным перемещением трамбовки 21 и грузоподъемного крюка 20, создает момент относительно центра вращения крюка 0 на плече Ь.
Грузоподъемный крюк 19 будет перемещаться, освобождая трамбовку 21 при условии:
R -а FTpi о + FTP2 С+ Окр I. (1) где
R Gip; Frp1 Grp frp1 I Frp2 - (GTP + ) f p2
frpi и frp2 - коэффициент трения, т.е. GTp -a GTp- tVpi Ы 6тр-К5кр)тР2 С + Gup I
(2)
Разделим правую и левую части на а fTpi b + fTp2 С +
+Ј тР2-С+Ј . (3) отригр
В виду того, что все трамбовки значительно больше веса крюка, последние два
слагаемых относительно малы и ими можно пренебречь. Получим
а frpi b + frp2 С (4)
Следовательно, если подобрать конструкцию крюка таким образом, что будет выполняться условие (4), сбрасывание трамбовки 21 будет происходить под действием реакции R.
После сброса трамбовки пружины штанг 16 приподнимут нижнюю траверсу 14 с защелками 17, которые уперевшись в траверсу 11 повернутся (показано пунктиром на фиг.1) и при дальнейшем опускании тра- вере смогут свободно проходить мимо упоров 22.
Для последующего захвата и подъема трамбовки, лежащей на грунте, канатом 9 траверсы 11 и 14 совместно опускаются, крюк 20 наклонной поверхностью 23 (пока- зано пунктиром на фиг.2) упирается в захват трамбовки, отклоняется и таким образом происходит захват трамбовки. При этом пальцы 18 и 19 свободно перемещаются в пазах 12 и 15, но, так как центр тяжести расположен левее оси подвеса (оси вертикального паза) крюка, то последний под действием силы тяжести стремится перемещаться к центральной оси, занимая верти- кальное положение.
После захвата крюком 20 трамбовки 21 цикл повторяется.
Аварийный спуск поднятой трамбовки осуществляется следующим способом. Канатом 3 ползун 4 опускается на верхнюю траверсу 11. При этом штыри 5, проходя через отверстие 13, упираются в защелки 17, которые под действием веса ползуна 4 проворачиваются, что позволяет им свободно проходить мимо упоров 22. Далее канатом 9 трамбовка опускается на грунт (при ослаблении каната 3).
Таким образом, предлагаемое устройство обеспечивает работу сбрасывающего устройства при наличии одного захватного крюка, что повышает надежность работы машины.
Формула изобретения
Устройство для динамического уплотнения грунтов, содержащее базовую машину, направляющую с упорами, трамбовку, грузозахватное устройство с верхней и нижней траверсами, грузозахватный крюк с пальцами, закрепленными соответственно на нижней и верхней траверсах, отличающее- е я тем, что, с целью повышения надежности в работе, нижняя траверса выполнена с горизонтальным пазом, верхняя - с вертикальным, в которых размещены с возможностью перемещения соответствующие пальцы.JQ
в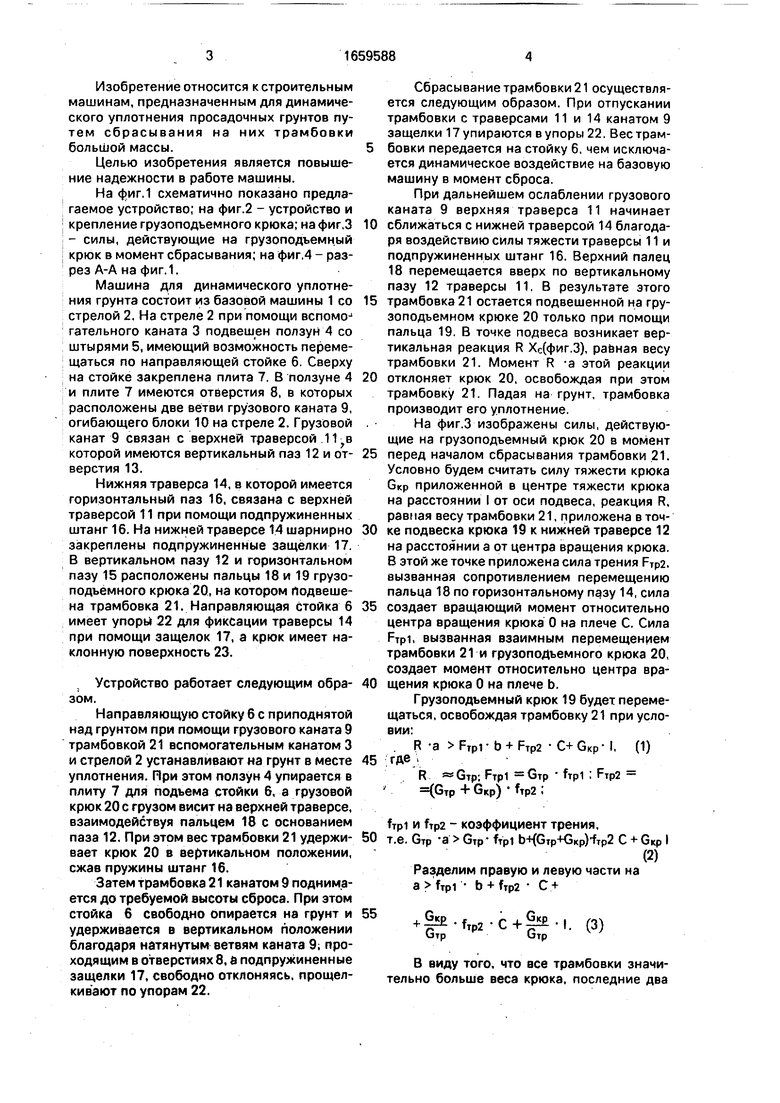
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1977 |
|
SU691378A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Устройство для разрушения высокопрочных материалов | 1983 |
|
SU1105574A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Машина для динамического уплотнения грунтов | 1987 |
|
SU1452881A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1984 |
|
SU1194818A1 |
| Устройство для динамического уплотнения грунтов | 1989 |
|
SU1650874A1 |
Изобретение относится к строительным машинам, предназначенным для динамического уплотнения просадочных грунтов путем сбрасывания на них трамбовки большой массы Цель изобретения - повышение надежности работы Устройство содержит базовую машину, направляющую с упорами, трамбовку, грузозахватное устройство с верхней 11 и нижней 14 траверсами, грузозахватный крюк На нижней и верхней траверсах выполнены соответственно, горизонтальный 15 и вертикальный 12 пазы, в которых размещены с возможностью перемещения кольца 18 и 19, закрепленные на грузозахватном крюке 4 ил 18 Ё О ел о ел со 00 Я Фиг. 2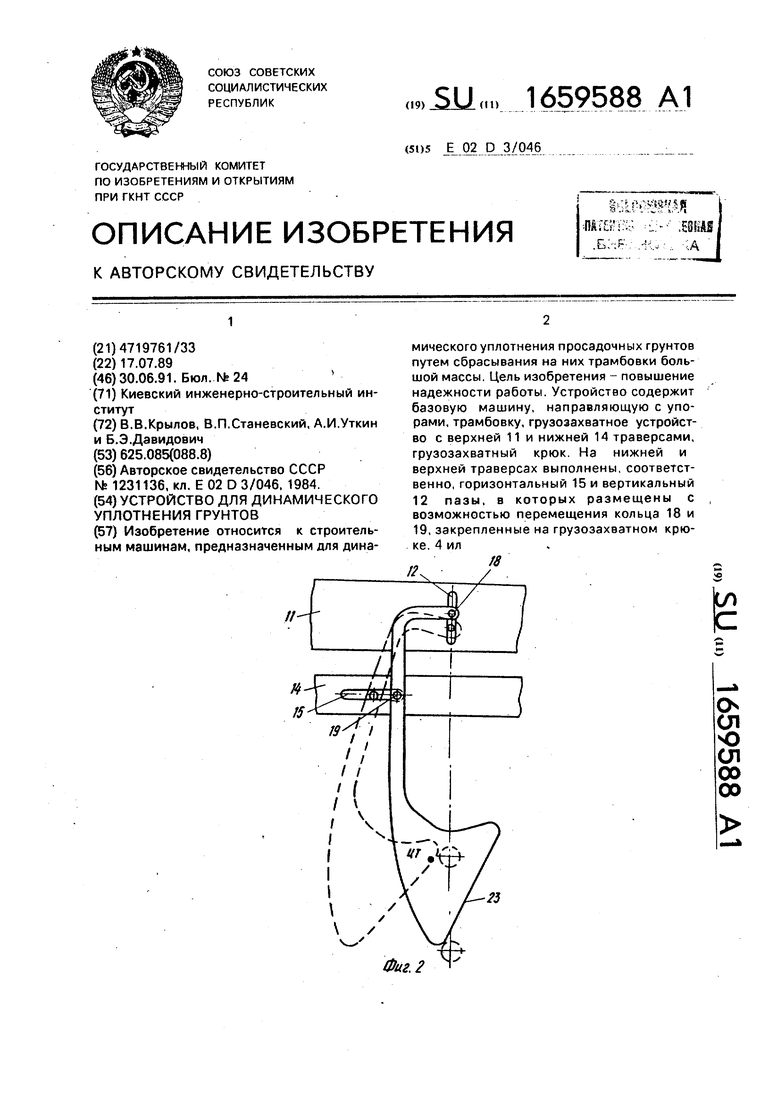
Фиг.З
22
А-А
| Устройство для уплотнения грунта | 1984 |
|
SU1231136A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
