Изобретение относится к измерительной технике и может быть использовано в судостроении для измерения несоосности при центровке валов судовых энергетических установок.
Цель изобретения - повьпление точности измерения за счет исключения поворота и осевого сдвига валов..
На фиг.I изображена схема приспособления для осуществления предлагаемого способа измерения несоосности валов; на фиг,2 - разрез А-А нафиг.1-;
На вал 1 с полумуфтой 2 на его
67572
Затем переставляют диск 9 на другую полумуфту 12 (положение 9 ) и вновь перемещают винтами 8 втулку 5 с дат.чиками 6 и 7 вдоль корпуса 3 до получения между рабочей поверхностью одного, из датчиков 7 и поверхностью диска 9 относительного нулевого зазора, после чего прекращают перемещение втулки 5, измеряют зазоры между рабочими поверхностями датчиков 6 и 7 и соответственно поверхностями полумуфты 12 в радиапь10
ном направлении и диска 9 в торцо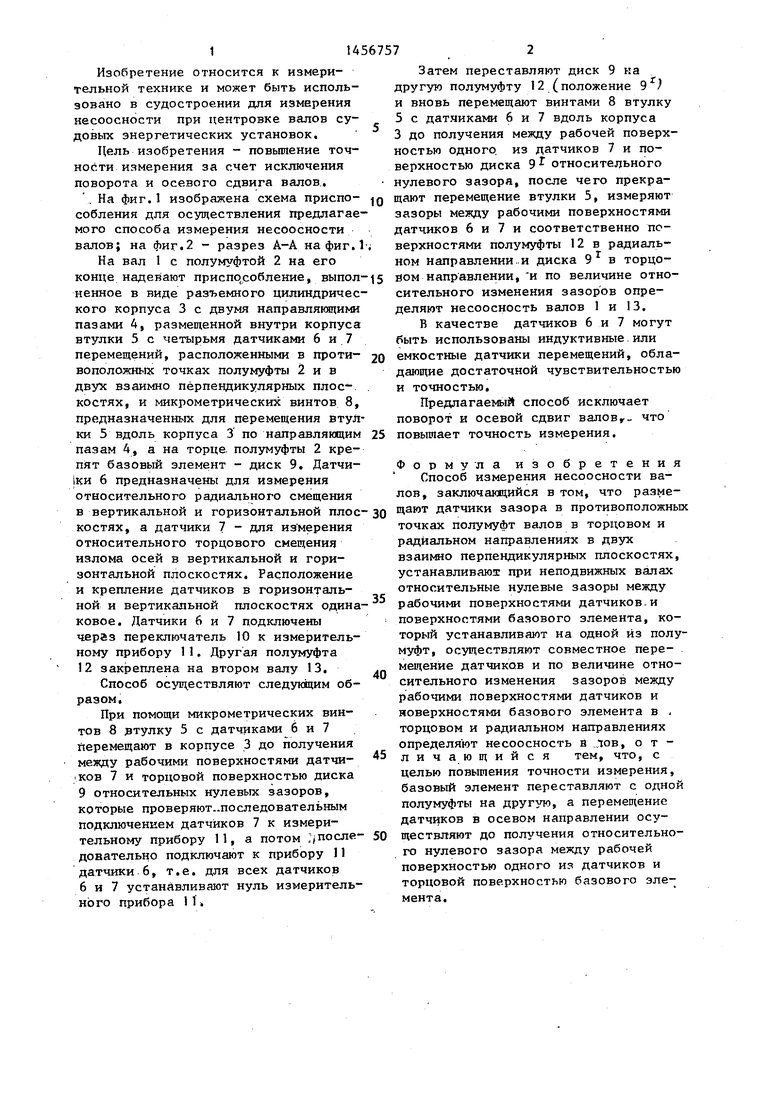
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения несоосности валов | 1989 |
|
SU1793203A1 |
| Способ измерения несоосности роторов турбоагрегатов | 1980 |
|
SU998855A1 |
| СПОСОБ КОНТРОЛЯ СООСНОСТИ ВАЛОВ МАШИН | 2003 |
|
RU2242708C1 |
| Прецизионная регулируемая опора | 1991 |
|
SU1799906A1 |
| Предохранительная фрикционная муфта | 1989 |
|
SU1762018A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2010 |
|
RU2431113C1 |
| Дисковый ротационный вискозиметр | 1988 |
|
SU1562771A1 |
| Упругопредохранительная муфта | 1986 |
|
SU1310536A1 |
| Устройство для центрирования изделия при зажиме | 1981 |
|
SU1000158A1 |
| Способ центровки турбоагрегата | 1989 |
|
SU1663390A1 |
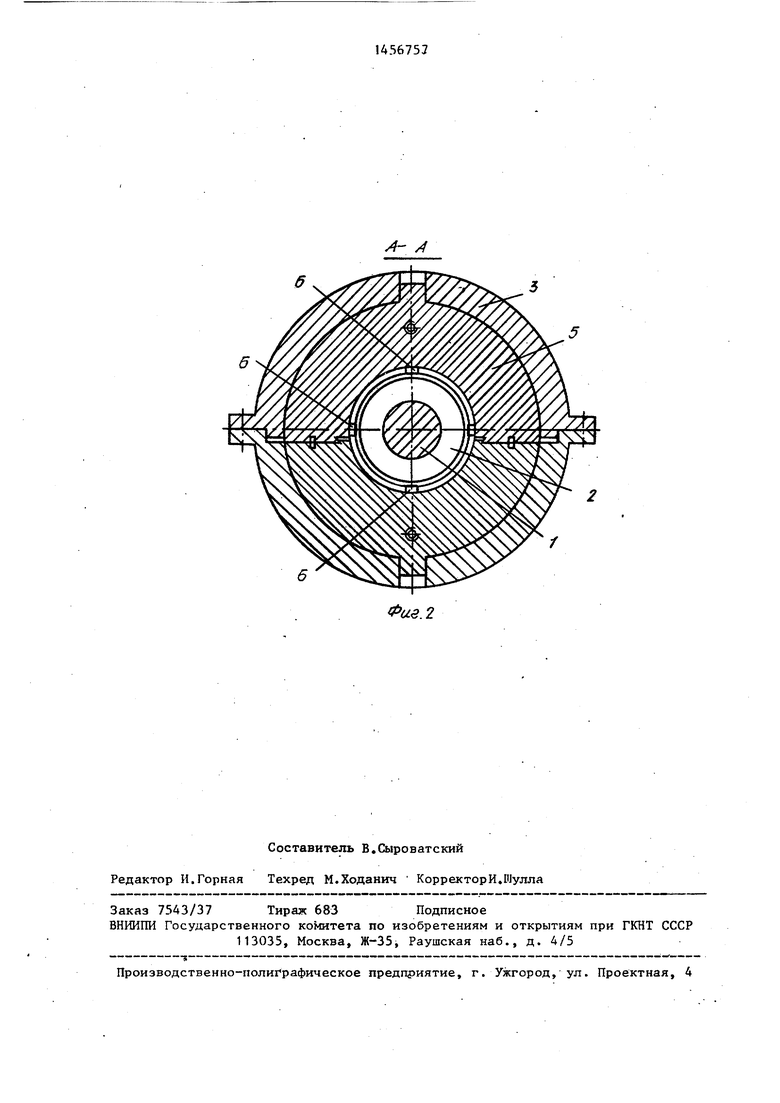
Изобретение относится к измерительной технике. Целью изобретения является повышение точности измерения. На вал 1 с полумуфтой 2 надевают приспособление, состоящее из корпуса 3, втулки 5 с четырьмя датчиками 6 и 7 перемещений, одинаково расположенными в противоположных полумуфты 2 в двух взаимно перпендикулярных плоскостях, и винтов 8, a на торце пoлvмycbты 2 крепят базовый диск 9. Датчики б и 7 под- к:тченн через переключатель 10 к из-мерительному приборз - 1 1. Вторая полумуфта 12 .закреплена нл валу 13, Винтами 8 перемещают втулку 5 с датчиками 6 и 7 до получения ме)сду рабочими поверхностями датчиков 6 и 7 и соответственно поверхностями полумуфты -2 и диска 9 относительных нулевых зазоров, которые проверяют последовательным подключением датчиков 6 и 7 к измерительному прибору П. Затем переставляют диск 9 на торец другой полумуЛты 12, перемещают втулку 5 с датчиками 6 и 7 до получения между одним из датчиков 7 и диском 9 относительного нулевого зазора, измеряют зазоры между всеми датчиками 6 и 7 и поверхностями полумуфты 12 и диска 9 по величине относительного изменения зазоров определяют несоосность валов I и 13. 2 ил. U5 fiia. 1
конце надевают приспо собление, выпол- з йом направлении, и по величине отноненное в виде разъемного цилиндрического корпуса 3 с двумя направлягадими пазами 4, размещенной внутри корпуса втулки 5 с четырьмя датчиками 6 и 7 перемещений, расположенными в проти- 20 воположных точках полумуфты 2 и в двух взаимно перпендикулярных плос- . костях, и микрометрических винтов 8, предназначенных для перемещения втулки 5 вдоль корпуса 3 по направляющим 25 пазам 4, а на торце полумуфты 2 крепят базовый элемент - диск 9, Датчи- 1ки 6 предназначены для измерения относительного радиального смещения
сительного изменения зазоров определяют несоосность валов 1 и 13.
В качестве датчиков 6 и 7 могут быть использованы индуктивные.или емкостные датчики перемещений, обладающие достаточной чувствительностью и точностью.
Предлагаемый способ исключает поворот и осевой сдвиг валов,-- что повышает точность измерения.
Формула изобретения
Способ измерения несоосности валов, заключакщийся в том, что размев вертикальной и горизонтальной плос-ЗО датчики зазора в противоположных
точках полумуфт валов в торцовом и радиальном направлениях в двух взаимно перпендикулярных плоскостях, устанавливают при неподвижных валах относительные нулевые зазоры между рабочими поверхностями датчиков.и поверхностями базового элемента, который устанавливают на одной из полумуфт, осуществляют совместное перемещение датчиков и по величине относительного изменения зазоров между рабочими поверхностями датчиков и иоверхностями базового элемента в . торцовом и радиальном направлениях
костях, а датчики 7 - для из мерения относительного торцового смещения излома осей в вертикальной и горизонтальной плоскостях. Расположение и крепление датчиков в горизонтальной и вертикальной плоскостях одинаковое. Датчики 6 и 7 подключены черйз переключатель 10 к измерительному прибору 11. Другая полумуфта 12 закреплена на втором валу 13,
Способ осущ ествляют следующим образом.
При помощи микрометрических винтов 8 втулку 5 с датчиками 6 и 7 перемещают в корпусе 3 до получения между рабочими поверхностями датчи- iKOB 7 и торцовой поверхностью диска 9 относительных нулевых зазоров, которые проверяют-.последовательным подключением датчиков 7 к измерительному прибору 11, а потом :;после довательно подключают к прибору 11 датчики 6, т,е, для всех датчиков 6 и 7 устанавливают нуль измерительного прибора 11
сительного изменения зазоров определяют несоосность валов 1 и 13.
В качестве датчиков 6 и 7 могут быть использованы индуктивные.или емкостные датчики перемещений, обладающие достаточной чувствительностью и точностью.
Предлагаемый способ исключает поворот и осевой сдвиг валов,-- что повышает точность измерения.
Формула изобретения
Способ измерения несоосности валов, заключакщийся в том, что разме5
0
5
0
точках полумуфт валов в торцовом и радиальном направлениях в двух взаимно перпендикулярных плоскостях, устанавливают при неподвижных валах относительные нулевые зазоры между рабочими поверхностями датчиков.и поверхностями базового элемента, который устанавливают на одной из полумуфт, осуществляют совместное перемещение датчиков и по величине относительного изменения зазоров между рабочими поверхностями датчиков и иоверхностями базового элемента в . торцовом и радиальном направлениях
определяют несоосность в лов, отличающийся тем, что, с целью повышения точности измерения, базовый элемент переставляют с одной полумуфты на , а перемещение датчиков в осевом направлении осуществляют до получения относительного нулевого зазора между рабочей поверхностью одного из датчиков и торцовой поверхностью базового элемента.
А- /
Фае.2
