4i
сл ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электромагнитным приводом | 1988 |
|
SU1617471A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935353A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
Изобретение относится к электротехнике и может быть использовано при управлении различными исполнительными механизмами на базе электромагнитного исполнительного органа пропорционального действия, когда требуется отработка управляющих воздействий с высокой точностью. Целью изобретения является повьшение качества управления электромагнитным исполнительным органом путем линеаризации его регулировочных характеристик. При управлении исполнительным органом 1 с обмоткой 2 используются сигналы, вырабатываемые датчиком 4 тока, датчиком 5 положения. Задающий сигнал 15 подается на вход линейного регулирующего блока 7. На вход сумма тора 12 подается сигнал производной нагрузочного момента электромагнитно го исполнительного органа. 2 ил. с (Л
Изобретение относится к электротехнике и может быть использовано при управлении различными исполнительными механизмами на базе электромагнит- кого исполнительного органа (ЭИО) пропорционального действия, когда требуется отработка управляющих воздействий с высокой точностью.
Целью изобретения является повьшение качества управления электромагнитным исполнительным органом путем линеаризации его регулировочных характеристик.
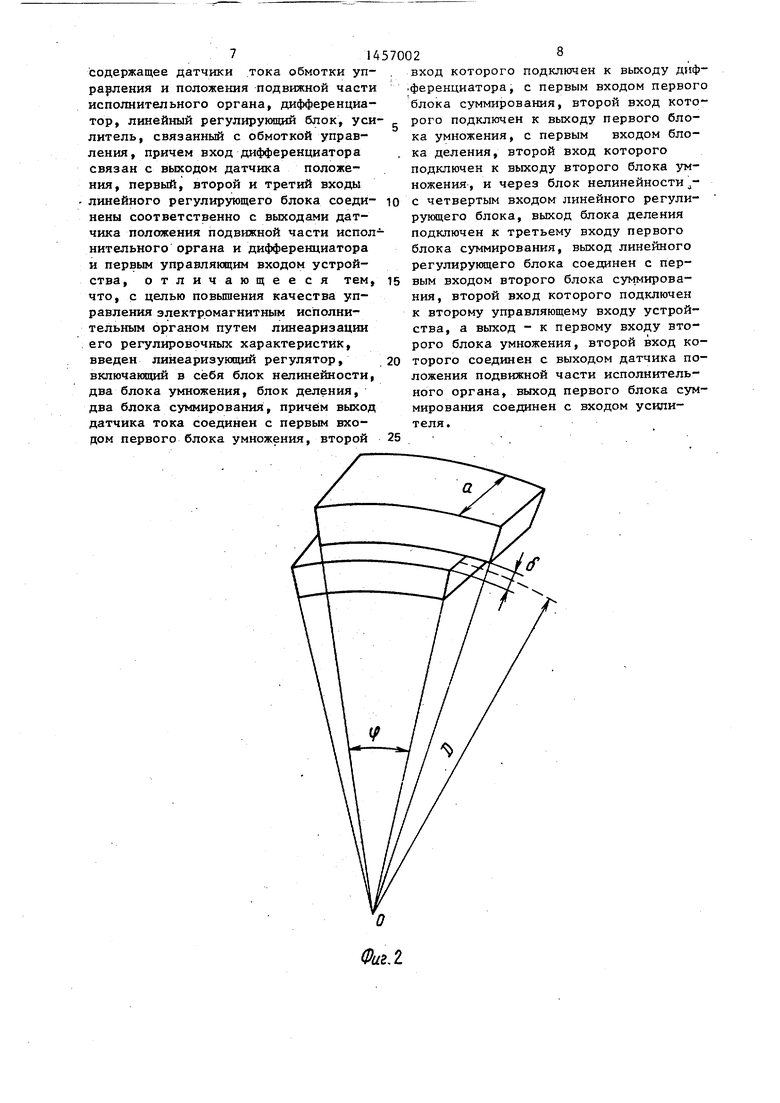
На фиг. 1 приведена функциональная схема устройства для управления ЭИО; на фиг. 2 - упрощенная конструктивная схема ЭИО.
Устройство управления ЭИО .(Фиг. I) содержит электромагнитный исполни- тельный орган 1 , включакяций обмотку 2 управления, усилитель 3, выход которого через датчик 4 тока соединен с обмоткой 2 управления, датчик 5 положения, связанный с подвижной частью ЭИО, дифференциатор 6, вход которого соединен с выходом датчика 5 положения, линейньй регулирующий блок 7,.первый вход которого соединен с выходом дифференциатора 6. ли- неаризирующий регулятор 8, включающий первый 9 и второй 10 блоки умножения, первый 11 и второй 12 блоки суммирования, блок 53 нелинейности, блок 14 деления. Причем выход диффе- ренциатора. 6 соединен также с первым входом первого блока 9 умножения, второй вход которого соединен с выходом датчика 4 тока, а выход - с . первым входом блока 11 суммирования. Выход датчика 4 тока соединен также с входом блока 13 нелинейности, пер- вым входом блока 14 деления и вторым входом блока 11 суммирования, а выход датчика 5 положения связан также с вторым входом линейного регулирующего блока 7 и первым входом второго блока 10 умножения, второй вход которого соединен с выходом второго блока 12 суммирования, а выход - с вхо- дом блока 14 деления. Третий вход линейного регулируннцего устройства 7 соединен с выходом блока 13 нелинейности, на четвертый вход подается задающий сигнал 15. Выход линейного регулируклцего блока 7 связан с первым входом второго блока 12 суммирования на второй вход которого подается сигнал 16 производной нагрузочного
момента электромагнитного исполнительного органа. Выход блока 14 деления связан с третьим входом первого блока 11 суммирования, выход которого соединен с входом усилителя 3.
Рассмотрим работу системы управления при отработке задающего сигнала..
JB исходном состоянии подвижная часть ЭИО 1 занимает некоторое на-, чальное положение (/ , ток в обмотке 2 управления, скорость и ускоре ние подвижной части равны 0.
При рассмотрении электромагнитного исполнительного органа как элемента системы автоматического управлени в нем могут быть вьщелены две подсистемы: электромагнитная и механическая, функциональное содержание которых составляют процессы преобразования электромагнитной энергии в механическую.
Уравнение движения механической части ЭИО имеет вид
+ -Vdq /dt - М„ - М„ О,
где Хц - момент инерции подвижной
. части ЭИО;
Lf - угол поворота (перемещение) подвижной части ЭИО, равный углу между осями подвижной и неподвижной полюсных систем ЭИО и отсчитываемый от их несогласованного положения (фиг.2);
) - коэффициент вязкого трения; Мц - момент, развиваемый исполнительным органом; М - момент нагрузки. Момент, развиваемый ЭИО поворотного типа, или усилие ЭИО поступательного действия определяют в соответствии с уравнением Максвелла
My dWj/di/,
где Wj - электромагнитная энергия.
Взаимосвязь между основными параметрами, определяющими величину электромагнитной энергии для линейной магнитной цепи, может быть установлена с помощью уравнений
Wj 4 F/2;
ф BS с IWG з;
F BSc/Gj IW;
Сэ HeSc/.(О
где Ф, В - магнитньй поток и индукция;
Gj - магнитная проводимость за- ; зора;
Sj, сГ - площадь и величина рабочего зазора;, I, W - ток и число витков обмотки управления; |Uo- магнитная постоянная. Определяя геометрические парамет- ры из упрощенной схемы ЭИО (фиг.2), выражения для электромагнитной энергии и момента, развиваемого исполнительным органом, составят
УЭ - B aDc V/4|Uo;(2)
My f/o HoaDI w .
20
25
Таким о.бразом, момент, развивае- мый ЭИО, пропорционален квадрату тока обмотки управления,что не учитывается в известной системе управления.
Уравнение, описывающее электромагнитную систему ЭИО, может быть представлено в следующем виде:
и IR-, + dv/dt,(3)
где и,1 и RY - напряжение, ток и сопротивление обмотки управления ЭИО; у - потокосцепление, опре- 30 линейную
деляемое выражениемdy/dt uj
V ф- V7, . или, учитывая уравнения (1), получим
4 IwVoaDl / Ky,,
где Кц, W aD/cf.
Тогда уравнение (3) примет вид
и Kv /dl/dt + K IdM /dt + IRy, отсюда
dl/dt (U - K dif/dt - 1К,,)/Кц,.
Учитывая также, что исходят из уравнения (2),
2K Idl/dt,
Однако пр ния в виде
и (Uj, + + Kyld4/dt
где KC 1Кц;
К Rj
нелинейная с
уравнений (4
dw/dt а dd/dt и
- IRi)/K
dM«/dt получим
dMy/dt (U -
Учитывая приведенные соотношения, ЭИО описывается нелинейной системой дифференциальных уравнений
dif/dt ы;(4)
dW/dt 0 ;
do(/dt (U - - - Ш,,)/1Кц,у- dM /dt/I - Vfl(/I,
где fl( (Ы w( - M H - b)) /I - ускорение
OK Определени равляющего си системе коорд добно как и жет производи
40 теории линейн ления.
При поступ регулировочно задания на ег
4g управляющий с в общем случа выбранных фаз ния, скорости части ЭИО 1, нала 15
50
Ue K.Uj
,, к
- Кзс,
где Ко, К
ее выбранному кр циенты обратн вующим коорди чальный момен -( Ч о , то Uo
7002
подвижной части ЭИО. Например, если нагрузкой является пружина с коэффициентов жесткости С, то
М,
dMrt/dt - - Clft of (KM - Ci/- Vw)/.
в известной системе управляющий сигнал ЭИО - напряжение обмотки управления фop иpoвaлcя на основании линейности функциональных зависимостей, описывающих ЭИО, что является неправомерным и приводит на практике к ухудщению качества управления ЭИО.
Однако при использовании уравнения в виде
линейную
и (Uj, + l/IdMj,/dt) Ч- + Kyld4/dt Ktl,(5)
где KC 1Кц;/2К
К Rj - коэффициенты пропорциональности;Ufl - величина управляющего сигнала в лц- неаризованной системе,
нелинейная система дифференциальных
уравнений (4) преобразовывается в
dy/dt uj
dw/dt а dd/dt и о - Vo(.
(6)
Определение закона изменения управляющего сигнала U , в выбранной системе координат в этом случае, подобно как и в известной системе, может производиться одним из методов
теории линейного оптимального управления.
При поступлении на вход линейного регулировочного блока 7 сигнала 15 задания на его выходе формируется
управляющий сигнал, который является в общем случае линейной функцией выбранных фазовых координат: положения, скорости и ускорения подвийной части ЭИО 1, а также задающего сигнала 15
Ue K.Uj - K,(L/- ) - (7)
,, к.
К - оптимальные по
- Кзс,
где Ко, К
е выбранному критерию качества коэффициенты обратных связей по соответствующим координатам. Но так как в начальный момент времени ы О, с О, -( Ч о , то Uo KoUj. В блоке 12
суммирования управляющий сигнал U суммируется с сигналом 16 производ- и ной нагрузочного момента, величина которого, например, для рассмотренно- с го случая, когда нагрузкой является пружина, пропорциональна скорости перемещения подвижной части.
Суммарный сигнал, поступая в блок 10 умножения, перемножается с сигна;- ю лом, пропорциональным (, который снимается с датчика 5 положения.
Результирующий сигнал с выхода блока 10 умножения поступает на один из .входов блока 14 деления. Здесь 15 величина этого сигнала делится на величину сигнала, поступающего на второй вход блока 14 умножения с выхода датчика 4 тока. Так как величина тока в начальный момент времени 20 равна О, то с выхода блока 14 деления будет сниматься сигнал максимально возможной, исходя из условий практической реализации, величины.
тока, протекающего через обмотку 2 управления.
Сформированные на выходах датчика 5 положения, дифференциатора 6 и 6jio ка 10 нелинейности сигналы поступают на входы линейного управляющего устройства 7, С помощью последнего согласно выражению (7) вырабатывается управляющий сигнал. Причем ускорение подвижной части ЭИО 1 при реализации линейного управлякщего алгоритма определяется косвенным путем по следую щей функциональной зависимости:.
d - М„/1 - Vw/I,
практическая реализация которой не представляет затруднений.
Полученный с выхода линейного управляющего устройства 7 управляклций сигнал Ue, просуммированный в блоке 12 суммирования с сигналом производной момента нагрузки, умножается в блоке 10 умножения на величину, проВ блоке 11 суммирования получен- 25 порциональную перемещению подвижной
ный с выхода блока 14 деления сигнал суммируется с сигналами, снимаемыми с выхода датчика 4 .тока и выхода блока 9умножения,
Так как в начальный момент време- ни ток в обмотке 2 управления и ускорения подвижной части равны О, то величина последних двух сигналов равна О и на вход усилителя 3 поступает сигнал, величина которого пропорцио- нальна величине ограниченного выходного сигнала блока 14 деления,
С выхода усилителя 3 усиленное результирующее напряжение поступает на обмотку 2 управления. При этом через обмотку 2 управления ЭИО 1 начинает протекать ток, а на выходе датчика 4 тока формируется сигнал, пропорциональный этому току.
Вследствие протекания тока через обмотку 2 управления возникает момент ЭИО 1, который приводит к перемещению подвижной части ЭИО 1, При этом на выходе датчика 5 положения формируется сигнал, пропорциональный положению подвижной части ЭИО 1, который, проходя через дифференциатор 6, преобразуется в сигнал, пропорциональный скорости перемещения подвижной части ЭИО 1.
Сигнал, пропорциональный моменту ЭИО 1, формируется на выходе блока 13 нелинейности, реализующем квадратичную зависимость момента ЭИО от
тока, протекающего через обмотку 2 управления.
Сформированные на выходах датчика 5 положения, дифференциатора 6 и 6jio- ка 10 нелинейности сигналы поступают на входы линейного управляющего устройства 7, С помощью последнего согласно выражению (7) вырабатывается управляющий сигнал. Причем ускорение подвижной части ЭИО 1 при реализации линейного управлякщего алгоритма определяется косвенным путем по следующей функциональной зависимости:.
d - М„/1 - Vw/I,
практическая реализация которой не представляет затруднений.
Полученный с выхода линейного управляющего устройства 7 управляклций сигнал Ue, просуммированный в блоке 12 суммирования с сигналом производной момента нагрузки, умножается в блоке 10 умножения на величину, прочасти ЭИО 1, а затем в блоке 14 деления делится на величину, пропорциональную току обмотки 2 управления.
Величина сформированного на выходе блока 14 деления сигнала алгебраически суммируется в блоке 11 суммирования с величиной сигнала -с выхода датчика 4 тока и величиной сигнала с выхода блока 9 умножения, которая равна произведению величин сигналов с выхода датчика 4 тока и дифференциатора 6, а затем через усилитель 3 подается на обмотку 2 управления ЭИО 1 ,
Так как величины напряжения на обмотке 2 управления, полученные согласно описанному, определяются выражением (5), то это приводит к линеаризации регулировочных характеристик и, следовательно, к повьщгению по сравнению с прототипом качества управления электромагнитным исполни- тельным органом. Перемещение подвижной части ЭИО 1 осуществляется по оптимальной, согласно выбранному критерию качества, траектории.
Реализация предлагаемой системы управления ЭИО значительно упрощаетс при использовании микропроцессорных управляющих устройств.
Формула изобретения
Устройство для управления электромагнитным исполнительным органом.
| Электромагнитный исполнительныйОРгАН | 1978 |
|
SU832606A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Йопович Н.Г | |||
| и др | |||
| Быстродействующий электромагнитиьй привод | |||
| - Вестник КПИ Электроэнергетика, 1981, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
