Изобретение относится к электротехнике и может быть использовано при управлении различными исполнительными механизмами на базе электромагнитного исполнительного органа (ЭИО) пропорционального действия, когда требуется отработка управляюцих воздействий с высокой точностью.
Цель изобретения - упрощение устройства и.повышение его надежности.
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит электромагнитный исполнительный орган (ЭИО) 1, включаюпшй обмотку 2 управления, ; усилитель 3 с больпшм коэффициентом усиления, выход которого через датчик 4 тока соединен с обмоткой 2 управления, датчик 5 положения, связанный с подвижной частью ЭИО 1, дифференциатор 6, вход которого соединен, с выходом датчика 5 положения, линейный регулирующий блок 7, первый вход которого соединен с выходом датчика 5 положения, а второй - с выходом дифференциатора 6, причем на два других входа поданы сигнал 8 задания по положению и сигнал 9 задания по скорости подвижной части ЭИО 1, а его выход связан с одним из входов блока 10 суммирова1шя, другой вход которого соединен с выходом блока 11 нелинейности, вход которого подключен к выходу датчика 4 тока. Сигнал с выхода блока 10 суммирования подается на вход усилителя 3 с большим коэффициентом усиления.
Уравнение движения механической части ЭИО 1 имеет вид
dfr PgE . Ча
(1)
де J - момент инерции подвижной
части ЭИО;
9 - угол поворота (перемещение) подвижной части ЭИО, равный углу между осями подвижной и неподвижной полюсных систем ЭИ О и отсчитываемый от их несогласованного положения; ft - коэффициент вязкого трения;
М„ - момент, развиваемый испол- нительным органом;
Мц - момент нагрузки (например,
если нагрузкой является пружина с коэффициентом С жесткости, то .9).
Момент,, развиваемый ЭИО поворотного типа, или усилие ЭИО поступательного действия с линейной магнитной системой пропорционально квадрату тока, .протекающего в обмотке:
.Ми -К Р.
Уравнение, описьгааияцее электромагнитную систему ЭИО, может быть пред- ставлено в виде
.. iR+aWd S) .Q) 9 ,,ч и..--™ „ g-+-gg J-, (2)
где U,i и R - соответственно напряжение, ток и сопротив- , ление обмотки управления ЭИО;
((1,6) Lpi0- потокосцепление.
После подстановки в выражение (2) значения (| (i,6) получим:
u.iK..L,if|.
Учитьюая выражения (1) и (3), тему уравнений, описывающую ЭИО, но записать в форме
fl -W; м, Ki%
dC3 1
jrrjt
Будем использовать управление в виде
(4)
где i. и - i (,
(5)
де 1д - управляющий сигнал на выходе линейного регулирующего устройства;
- - коэффициент передачи усилите- ля с большим коэффициентом
усиления. Под .большим коэффициентом понимает 1 ся такое значение -, что величина
для всех значений по крайней
мере в десять раз меньше величины
J MU- %« « ° °
WOKC
случае изменение тока в обмотке ЭИО будет происходить значительно быстрее, чем изменение механических координат подвижной части ЭИО - (J и fl .
Подставив значение управляюцей величины в последнее уравнение системы (4), получим:
JH .
или
io-KP-6iR-6L iQ. (6)
Учитывая, что коэффициент передачи
усилителя ,т.е. , квазиуста- новившееся решение уравнения (6) в соответствии с теоремой Тихонова равно
io - КР.10
При подстановке в третье уравнение системы (4) полученного значения для тока в обмотке управления ЭНО:
Ъз. К
(7)
система (4) преобразуется в линейную систему дифференциальных уравнений второго Порядка;
(8)
Таким образом, применение квадратичной обратной связ-и по току в соответствии с (5) позволяет не только линеаризовать исходную нелинейную систему уравнений (4), но и понизить ее порядок на единицу. Физически управление (5) означает, что обмотка управления ЭИО получает питание от регулируемого источника тока с пара- болической характеристикой (7). Управлением для системы (8) является управляющий сигнал i.
Величину ig будем искать в виде линейной функции задающего си1 нала, сигнала обратной связи по положению и скорости подвижной части ЭИО:
,( -е)Лао(Ш,аА - -(J). (9)
где ад и ац коэффициенты обратных связей по положению и скорости подвижной части ЭИО соответственно.
После подстановки в систему (8)
значения i,, из выражения (9) получим
5 -п- dt
(9iaA-9)(W3C.A-W). (Ю) Таким образом, предлагаемое уст- ройство обеспечирает линеаризадою нелинейиостей, присуишх злектромаг- нитным исполнительным органам и за счет зтого дости1 ается повышение ди0
5
0
5
0
5
намических и статических характеристик данной системы управления.
Устройство работает следующим образом.
Рассмотрим работу системы управления ЭИО 1 при изменении сигнала зада- ния по положению от б, р,о Qy
В исходном состоянии подвижная часть ЭИО 1 занимает положение 9 - . при этом ;(0-СОрд 0, а в линейном управляющем регулирующем блоке 7 согласно выражению (9) вырабатывается сигнал io, С9. Ток, протекаю- щнй в обмотке 2 управления, равен
Г-
i Coэдaвae «й этим током мо- 1
мент уравновешивается моментом сопротивления.
Пусть изменение положения от S, до 0g должно происходить с постоянной скоростью, то1 да:
9,; и,, при
6,,+CO,t;CJwA(i)f, при б MA .. при t %--.
При изменении сигнала 8 задания 110 положению и сигнала 9 по скорости, на выходе линейного регулирующего блока / появляется управляющий сиг- , нал, величина которого определяется из выражения
«JagCQ, fG)ct-9)() .
В блоке 10 суммирования, который может быть выполнен по известной схеме, управлягаций сигнал i суммируется с сигналом, поступающим с выхода блока 11 нелинейности, который реализует квадрал ичную зависимость и может быть выполнен на аналоговом перемножителе К 525 ПС2 но известной схеме.
Так как усилитель 3 обладает большим коэффициентом усиления, ток в обмотке 2 упрапления практически мгновенно отрабатывает все изменения упраялякщего сигнала и равен i
10 г,
--. При превышении движущегося моN
мента исполнительного органа над моментом сопротивления подвижная часть ЭИО 1 приходит в движение. Движение подвижной ЭИО 1 части будет происходить так, чтоб стремится к9у,, а CJ стремится кОЗаддДо тех пор, пока она не займет положения 0 , при этом управляющий си1 нал
станет пропорционален моменту i Cdj сопротивления.
Ток в обмотке 2 управления будет
равен
Рассмотрим работу системы управления в статическом режиме, -const. Пусть сигнал с выхода блока 11 нелинейности по абсолютной величине будет меньше, чем управляющий сигнал ip, тогда на выходе блока 10 суммирования будет присутствовать положительный сигнал ошибки, а к обмотке 2 управления через усилитель 3 будет приложено максимальное напряжение, в результате чего ток в обмотке 2 управления ЭИО 1 начнет возрастать до тех пор, пока сигнал на выходе блока 11 нелинейности не станет больше управляющего сигнала i. В этот момент усилитель 3 отключит обмотку 2 управления от источника питания. Под действием ЭДС самоиндукции через обмотку 2 управления, обратньш диод усилителя 3 и датчик 4 тока будет протекать ток до тех пор, пока сигнал на выходе блока 11 нелинейности не станет меньше i,,. После этого на выходе усилителя 3 снова появится напряжение и описанные процессы повторятся.
Таким образом, с учетом реального ограничения напряжения усилителя 3, к обмотке 2 управления ЭИО 1 будет прикладываться напряжение sign(ijj -К1),где и - напряжение ограничения усилителя 3. Среднее значение тока будет поддерживаться за счет поочередного подключенгч обмотки 2 управления к источникам U. Возникающий при этом скользящий режим характеризуется тем, что ток в обмотке управления определяется из выражения
где
Р
переменная составлягсщая, обусловленная переключением усилителя 3.
Частота возникаищих колебаний будет стремиться к бесконечности, а амплитуда - к нулю. Для снижения час- . тоты переключения в усилителе 3 с большим коэффициентом усиления ввеле- на положительная обратная связь. За счет изменения глубины положительной обратной связи можно регулировать
5
0
5
30
35
45
50
55
амплитуду и частоту переменной составляющей тока i так, чтобы ее амплитуда оставалась пренебрежимо малой, а частота переключений могла быть практически реализуемой.
Таки| образом, предлагаемое устройство обеспечивает линеаризацию нелинейностей, присущих электромагнитным исполнительным органам и за счет этого достигается улучшение динамических и статических характеристик системы управления ЭИО 1.
Расчет и реализация алгоритма управления по сравнению с прототипом благодаря понижению порядка описывающих систему дифференциальных уравнений упрощается.
Формула изобретения
Устройство для управления электромагнитным приводом, содержащее выводы для подключения обмотки управления, датчики тока обмотки управления и положения подвижной части исполнительного органа, дифференциатор, вход которого связан с выходом датчика положения, блок нелинейности, реализующий квадратич1Р-то зависимость ,y током обмотки управле1:ия и моментом элект- ромагнитно1-о исполнительного привода, вход которого связан с выходом датчика тока, и линейный регулирующий блок, входы которого соединены соответственно с выходами датчика положения, дифференциатора и выводами для подключения источников задающих сигналов по положению и скорости, отличающееся тем, что, с целью упрощения и повышения надежности, в устройство введен усилитель с боль- щим коэффициентом усиления, (5, 1 Де - U и суммируюи(ий блок, выход усилителя, через датчик тока соединен с обмоткой управления, его вход подключен к выходу блока суммирования, первый вход которого связан с блоком нелинейности, а второй вход подключен к выходу линейного регулирующего блока, которое вырабатывает управляющий сигнал согласно выражению:
ig(C-Jag)0+ (0-,Ta)(I)-t-JaQ еадд +
+ Jay ,
где ig управляющий сигнал;
С - коэффициент жесткости нагРУ
304ной пружины; J - момент инерции подвижной
части;
91617471- О
«г
а( и а -коэффициенты обратных связей Ж- коэффициент вязкого трения; по положению и скорости Q
подвижной части ЭИО соответ- , „ - задание по положению и ско- ственно;рости соответственно,
Ы и (О - соответственно положение и
скорость подвижной части 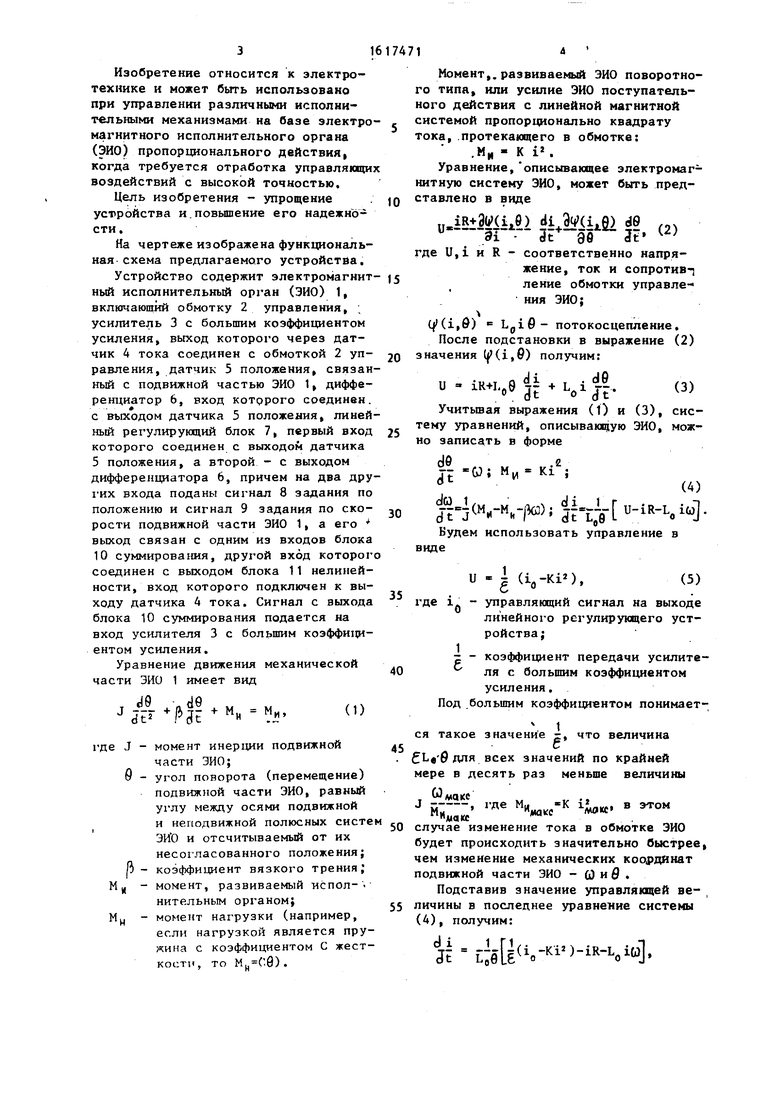

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электромагнитным исполнительным органом | 1987 |
|
SU1457002A1 |
| Устройство для регулирования температуры | 1979 |
|
SU840837A1 |
| Система регулирования | 1981 |
|
SU954933A1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| ЭЛЕКТРОМАГНИТНЫЙ СЛЕДЯЩИЙ ПРИВОД | 2003 |
|
RU2278465C2 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
Изобретение относится к электротехнике и может быть использовано при управлении различными исполнительными механизмами на базе электромагнитного исполнительного органа пропорционального действия, когда требуется отработка управляющих воздействий с высокой точностью. Целью изобретения является упрощение устройства и повышение надежности. Устройство содержит электромагнитный исполнительный орган 1, включающий обмотку 2 управления, датчики тока 4 обмотки управления и положения 5 подвижной части исполнительного органа, дифференциатор 6, вход которого соединен с выходом датчика положения, блок 11 нелинейности, вход которого связан с выходом датчика тока, линейный регулирующий блок 7, на входы которого подаются сигналы с датчика положения, дифференциатора и задающие сигналы. Введен усилитель 3 с "большим" коэффициентом усиления K = 1/ε, где ε →0. Предложенное устройство обеспечивает лианеризацию нелинейностей, присущих электромагнитным исполнительным механизмам, за счет чего достигается улучшение динамических и статических характеристик устройства. 1 ил.

| Электромагнитный привод | |||
| Вести | |||
| Киев, политехн | |||
| ин-та | |||
| Электроэнергетика, 1981, вьт.4, с.53-5.6 | |||
| Устройство для управления электромагнитным исполнительным органом | 1987 |
|
SU1457002A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
