; .. 1
: Изобретение относится к измери- |тельной технике пространственного (ориентирования с использованием гра |витационного поля, а именно к устрой- ствам измерения углов наклона объ- екта.
Цель изобретения - улучшение эксплуатационных характеристик за счет обеспечения возможности точного измерения углов наклона объекта в двух взаимно перпендикулярных плоскостях. На чертеже представлена структурная схема двухкоординатного маятникового наклонометра.
На чертеже обозначено: 1 - основание, внешняя рамка кардана; 2 - статор первого преобразователя угла поворота в-электрический, сигнал; 3 - ротор первого преобразователя угла поворота в электрический сигнал; 4 - ось вращения статора первого преобразователя угла поворота в электрический сигнал; 5 - внутренняя рамка кар- дана, стержень маятника; 6 - опоры оси вращения статора второго преобразователя угла поворота в электрический сигнал; 7 - статор второго преобразователя угла поворота в электри- ческий сигнал; 8 - ротор второго преобразователя угла поворота в электрический сигнал; 9 - основная масса маятника; 10 и 11 - шарниры поводка; 12 - шаровая опора; М - ось маятника; 0, - шарнирный параллелограмм; ОХ и OY - оси координат.
Q 5
0 5 0
5
Двухкоординатный маятниковый наклономер содержит основание 1, с которым посредством карданового подвеса связана основная масса маятника 9, между внешней рамкой 1 кардана-.и внутренней рамкой 5 кардана установлен первьй преобразователь угла поворота в электрический сигнал, причем ось ег.о статора 4 вращается относительно внешней рамки 1 кардана, а его ротор 3 вращается вместе с внут-. ренней рамкой 5 кардана, статор второго преобразователя угла поворота в электрический сигнал 7 установлен в осевых опорах 6, а его ротор 8 жестко связан с шарниром 10, которьтй при помощи шарнира 11 и шаровой опоры 12 связан с основанием 1. Оси ротора и статора первого и второго преобразователей пересекаются с осью маятника NM Соответственно в точках 0 и 0.
Устройство работает следующим образом.
При наклоне основания 1 ось. маятника NM автоматически занимает отвесное положение, а взаимно перпендикулярные оси роторов первого и второго преобразователей угла поворота в электрический сигнал горизонтальное положение. Ротор первого преоб- разователя 3 поворачивается вместе с внутренней рамкой 5 кар.дана на угол, точно соответствующий углу на- , клона основания 1 в плоскости NOY. При помощи шарнирного параллелограммного поводка 0,, состоящего из шарниров 10 и 11 и шаровой опоры 12, ротор второго преобразователя угла поворота в электрический сигнал 8 поворачивается на угол, точно соответствующий углу наклона основания 1 в плоскости NOY.
Таким образом, двухкоординатный маятниковый наклономер выполняет точное измерение углов наклона объекта, жестко связанного с основанием 1, в двух взаимно перпендикулярных плоскостях.
HaKjjoHOMep, изготовленный по предложенной структурной схеме, в котором в качестве преобразователей углов поворота в электрический сигнал применены потенциометры типа ПТП2 К-01-10 кОм ±0,3%, при длине маятника 250 мм и основной массе 0,3 кг, позволяет измерять углы наклона в двух взаимно перпендикулярных плоскостях в диапазоне ±60° с погрешностью ± 1 ° .
Формула изобретен.ия
Двухкоординатный маятниковый наклономер, содержащий основание, маятник, два преобразователя угла поворота в электрический сигнал с соответствующими роторами, статорами и осями вращения и карданный подвес, между внутренней и внешней рамками которого установлен первый преобразователь угла поворота в электрический сигнал, отличающийся тем, что, с целью улучшения эксплуатационнь х характеристик за счет равноточного и йерения углов наклона основания в двух взаимно перпендикулярных плоскостях, статор второго преобразователя угла поворота в электрический сигнал установлен во введенных опорах, его ось вращения совмещена с геометрической осью маятника, а ось его ротора расположена перпендикулярно этой оси и связана с основанием через
введенньй шарнирный поводок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Устройство для определения углов наклона подвижных объектов | 1976 |
|
SU727992A1 |
| ГИРОСКОП АДАПТИВНОГО РОБОТА НОВИНЬКОВА | 2001 |
|
RU2221689C2 |
| Устройство для измерения малых углов наклона объекта | 1977 |
|
SU617675A1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2012 |
|
RU2504735C1 |
| Способ тарировки наклономера | 1985 |
|
SU1520339A1 |
| Способ определения углового положения объекта | 1990 |
|
SU1760317A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
Изобретение относится к измерительной технике пространственного ориентирования с использованием гравитационного поля, а именно к устройствам измерения углов наклона объекта. Целью изобретения является улучшение эксплуатационных характеристик за счет обеспечения возможности точного измерения углов наклона объекта в двух взаимно перпендикулярных плоскостях. Устройство состоит из маятника 9 с основной массой, прикрепленного при помощи карданного подвеса к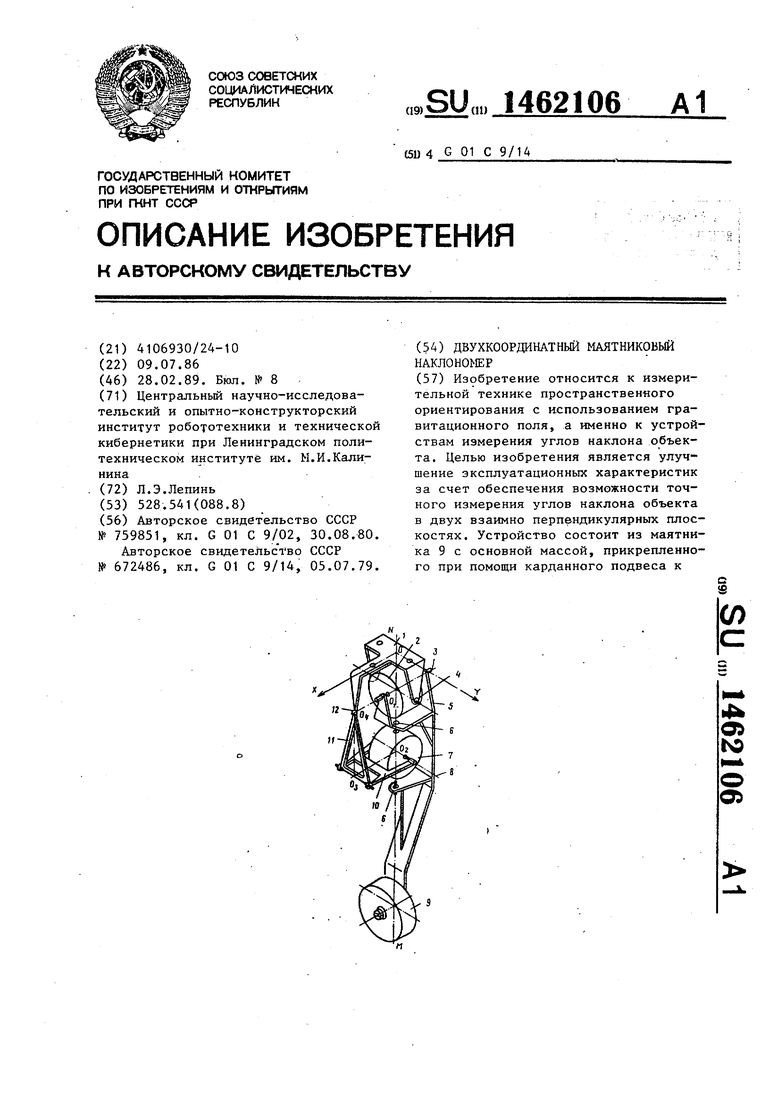
| Авторское свидетельство СССР № 759851, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1977 |
|
SU672486A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
