Фиг.1
j Изобретение относится к средствам погрузки и транспортировки штучных Г1)узов в складах и на открытых площадках и предназначается для удержа- кия груза на грузоподъемнике при погрузке и перемещении,
Цель изобретения - новьшгение надежности зажимания груза.
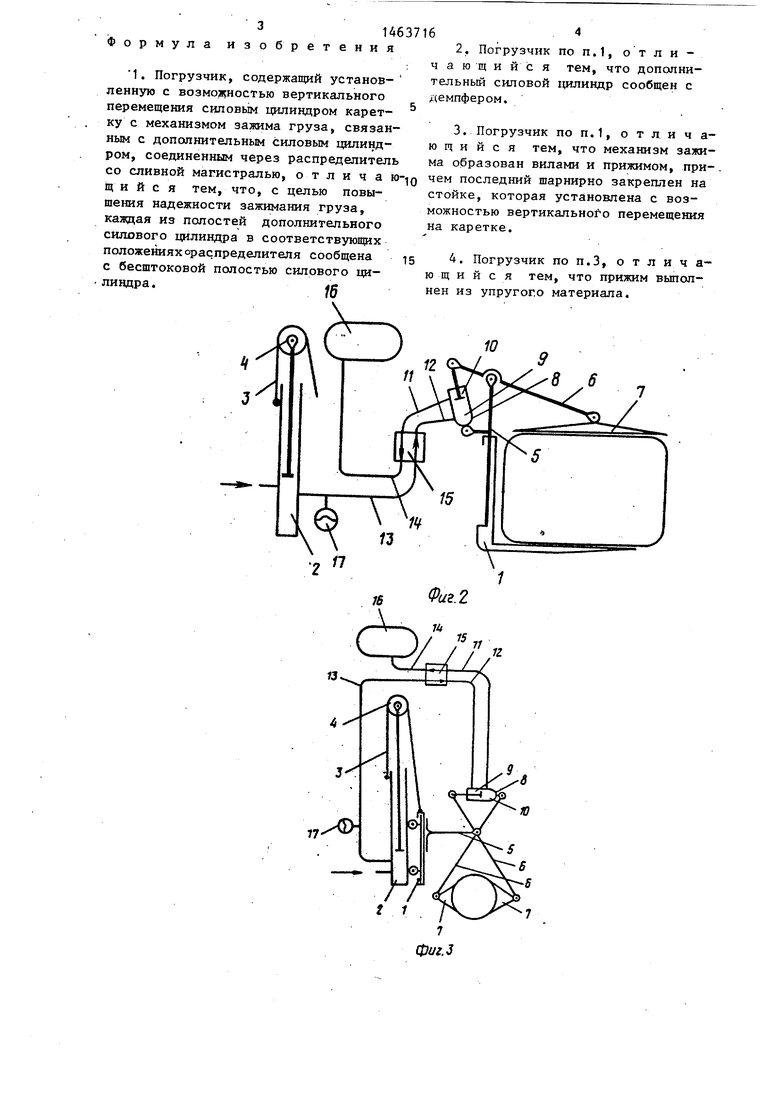
На фиг. 1 изображен погрузчик с вилочным захватом и прижимом в рас- фиксированном положении; на фиг. 2 - то же, прижим в рабочем положении, груз зафиксирован; на фиг. 3 - то же, грузоподъемник с вертикальным (при- жимом) механизмом зажима груза.
Погрузчик содержит каретку 1, силовой цилиндр 2 ее подъема с грузовой цепью 3 и роликом 4, механизм зажима груза, содержащий стойку 5, прикрепленную к каретке 1 с возможностью вертикального перемещения, с парниром в верхней части для установ- ф1 двуплечего рычага 6. К последнему вирнирно крепятся с одного конца приЛим 7, а с другого - дополнительный j:илoвoй цилиндр 8 (прижима) с рабочи- 1|ш полостями фиксации 9 и расфикса- 10.; Второй конец дополнительного илового цилиндра 8 шарнирно закреп- Лен на стойке 5. Полости дополнитель ;аого силового цилиндра 8 трубопроводами 11-14 соединены с распределителем 15 и с силовым цилиндром 2, а 1трубопровод 14 соединяет распредели- Тель 15 с гидробаком 16 (при использовании в качестве рабочей среды жид IKOCTH) , кроме того, в гидротрассе |установлен демпфер 17.
I Погрузчик,работает следующим 1образоМо
Перед захватом груза необходимо прижим 7 перевести в верхнее положение. Для этого распределитель 15 переключают в положение расс мксации, обеспечивающее поступление рабочей среды, например жидкости, из силовог цилиндра 2 по трубопроводам 13 и 11 в полость 10 дополнительного силового цилиндра 8. При зтом жидкость из полости 9 по трубопроводам 12 и 14 вытесняется в гидробак 16. Для фиксации груза необходимо распределитель 15 перевести в положение фиксации, обеспечивающее изменение направления потока жидкости из силовог цилиндра 2 по трубопроводам 13 и 12 в полость 9 дополнительного силовог цилиндра 8, а по трубопроводам 11 и
14 из полости 10 в г.идробак 16. Перетекание жидкости продолжается до соприкосновения прижима 7 с поверхностью груза, находящегося на вилах, после этого происходит подъем груза в транспортное положение за счет дальнейшего нагнетания жидкости в силовой цилиндр 2. Усилие прижатия определяется соотношением диаметров силовых цилиндров 2 и В, соотношением плеч рычага 6 и величиной груза, находящегося на грузоподъемнике. При работе с вертикальным (прижимом) механизмом зажима (фиг.З) погрузчик подъезжает к обрабатьшаемому грузу и опускает каретку со.:стойкой 5, до- полнительйым силовым цилиндром 8 и прижимами 7, так чтобы они оказались на уровне груза. Распределитель 15 включают в положение фиксации и поднимают груз на требуемую высоту.
Освобождение захвата от груза осуществляется в зависимости от типа захвата в следующем порядке: груз подводят к месту назначения и включают распределитель 15 в положение расфиксации, при этом происходит некоторое опускание груза за счет перетекания жидкости из силового ци.- линдра 2 в полость 10, расфиксации если этого опускания недостаточно, то дополнительно опускают подвижную каретку. При нейтральном положении распределителя 15 каналы запираются и прижим остается в том положении, которое он имел в момент перевода распределителя 15 в нейтральное по- ложение. В нейтральное положение приспособление переводится при переездах без груза или когда нет необходимости груз фиксировать на грузд- подъемнике.
Демпфер 17 сглаживает резкие коебания давления в полости фиксации дополнительного силового цилиндра 8, возникающие за счет динамических нагрузок при транспортировке.
Для обработки грузов с различными габаритами стойки 5 прижима 7 уста-. новлены на каретке 1 с возможностью закрепления на различной высоте.
Надежность закрепления различных грузов обеспечивается также сменными прижимами 7 с различной конфигурацией, соответствующей форме груза с различным коэффициентом трения и выполненными из. упругого материала.
10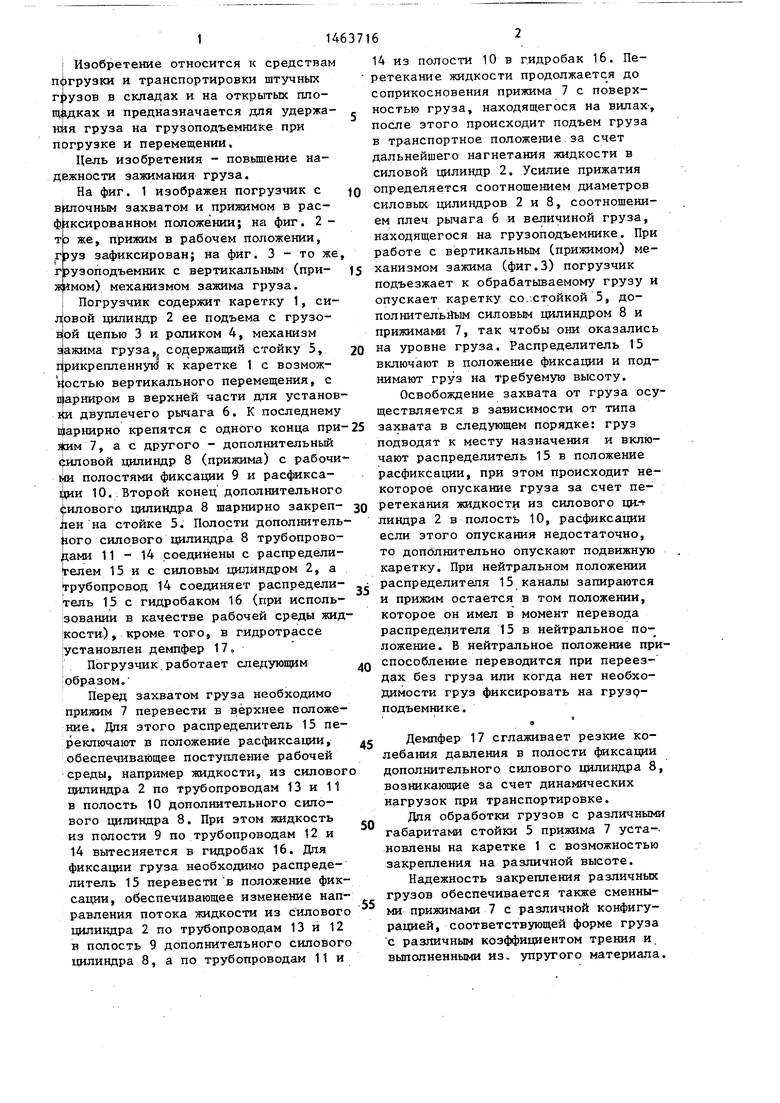
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь к погрузчику | 1985 |
|
SU1278295A1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| Захват погрузчика | 1987 |
|
SU1521713A1 |
| Погрузчик | 1984 |
|
SU1172878A1 |
| Челюстной захват погрузчика | 1985 |
|
SU1310332A1 |
| Бульдозерно-грейферный ковш к погрузчику | 1975 |
|
SU537945A1 |
| Грузозахватное устройство вилочного погрузчика | 1989 |
|
SU1699894A1 |
| Челюстной погрузчик | 1988 |
|
SU1562312A1 |
| Комбинированный захват к погрузчику | 1987 |
|
SU1512925A1 |
| Кантователь контейнеров к погрузчику | 1987 |
|
SU1418289A2 |
Изобретение относится к средствам погрузки и транспортировки штучных грузов. Цель изобретения - повышение надежности зажимания груза. f6 Она обеспечивается более надежным закреплением груза на грузоподъемнике и автоматической регулировкой величины прижимающего усилия пропорционально массе обрабатываемого груза. Это достигается путем соединения рабочих полостей дополнительного силового цилиндра 8, прижима 7 и напорной псшости силового цилиндра 2 подъема через распределитель 15, позволяющий чередовать подключаемые полости. Приспособление может найти применение на транспортных средствах в качестве автоматического фиксатора штучных грузов. При подаче рабочей среды дополнительный силовой цилиндр 8 воздействует на прижим 7. При достижении усилия на груз, пропорционального его массе, начинается подъем каретки 1 с грузом. 3 з.п. ф-лы, 3 ил. (Л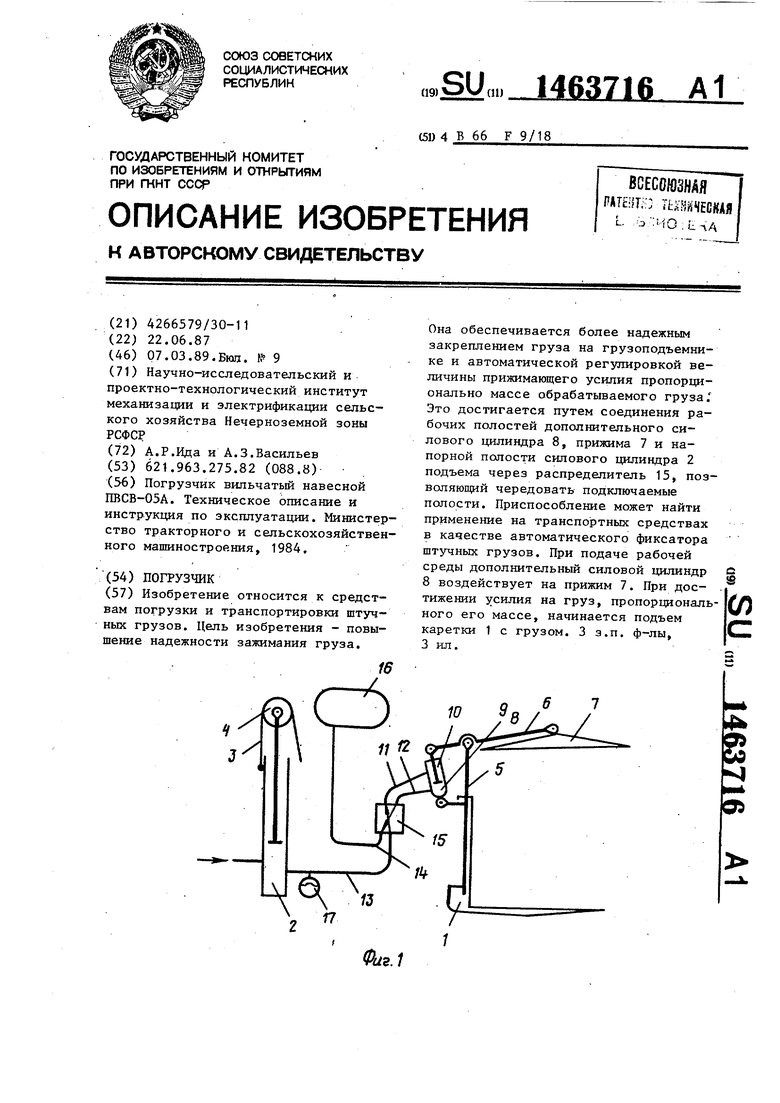
77W)l//v
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Техническое описание и инструкция по эксплуатации | |||
| Министерство тракторного и сельскохозяйственного машиностроения, 1984, | |||
