СП ю
со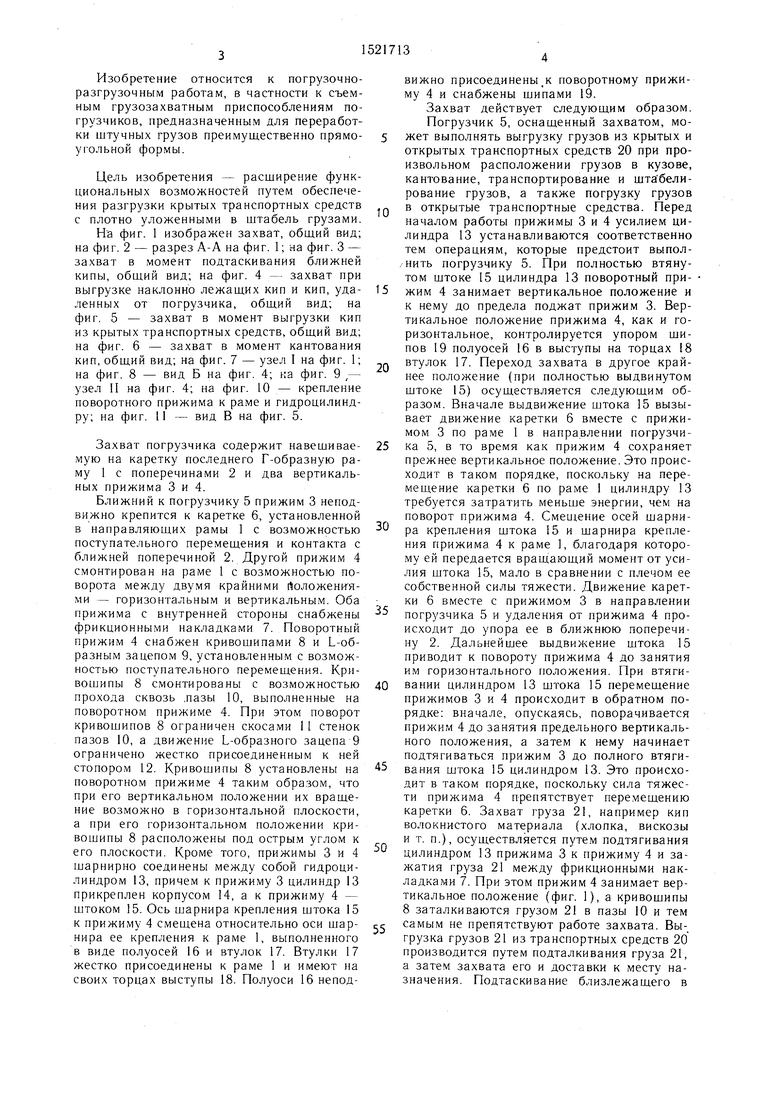
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство укладки и разборки штабеля штучных грузов | 1985 |
|
SU1397405A1 |
| Погрузчик | 1984 |
|
SU1172878A1 |
| Погрузчик для кантования,транспортировки и укладки изделий | 1974 |
|
SU540817A1 |
| Захват-кантователь к погрузчику | 1985 |
|
SU1278295A1 |
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| Грузозахватное устройство вилочного погрузчика | 1989 |
|
SU1699894A1 |
| Грузозахватное устройство к погрузчику | 1987 |
|
SU1532540A1 |
| Погрузчик для плодов | 1981 |
|
SU1024416A2 |
| Навесное оборудование к передвижным погрузчикам | 1976 |
|
SU587094A2 |
| Захват-кантователь для бочек к погрузчику | 1986 |
|
SU1428688A1 |
Изобретение относится к погрузочно-разгрузочным работам, конкретно к съемным грузозахватным приспособлениям погрузчиков, предназначенным для переработки штучных грузов преимущественно прямоугольной формы. Цель изобретения - расширение функциональных возможностей путем обеспечения разгрузки крытых транспортных средств с плотно уложенными в штабель грузами. Захват погрузчика содержит консольно укрепленную раму 1, к которой подвешены прижимы 3 и 4. Прижим 3 имеет возможность возвратно-поступательного перемещения, а прижим 4 - вращательного перемещения между двумя крайними положениями - горизонтальным и вертикальным. Оба прижима с внутренней стороны снабжены фрикционными накладками 7, а поворотный прижим 4 дополнительно снабжен кривошипами L=образным зацепом 9, установленным с возможностью поступательного перемещения. Груз 21 захватывается погрузчиком 5 по ближней и дальней сторонам при помощи прижимов 3 и 4 и таким образом транспортируется. Выгрузка груза 21 из транспортных средств производится путем подтаскивания его к погрузчику 5 с последующим захватом груза 21 и доставкой его к месту назначения. Груз 21 подтаскивается кривошипами или краем прижима 4. В первом случае прижим 4 приводится в горизонтальное положение, во втором-в вертикальное. Кантование груза 21 производится с помощью L-образного зацепа 9 путем подведения его под нижнюю кромку груза 21 и последующего подъема рамы 1. 1 з.п. ф-лы, 11 ил.
V// ////// ////////////////// /
(pus. i
Изобретение относится к погрузочно- разгрузочным работам, в частности к съемным грузозахватным приспособлениям погрузчиков, предназначенным для переработки штучных грузов преимущественно прямоугольной формь.
Цель изобретения - расширение функциональных возможностей путем обеспечения разгрузки крытых транспортных средств с плотно уложенными в штабель грузами.
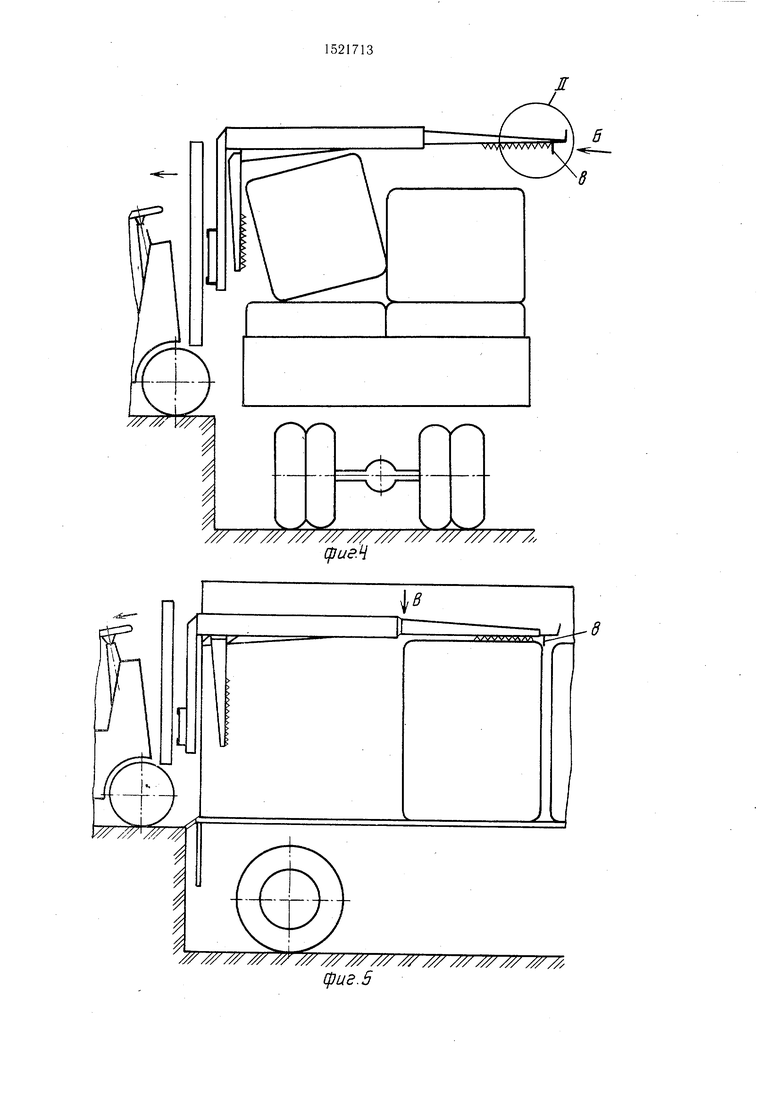
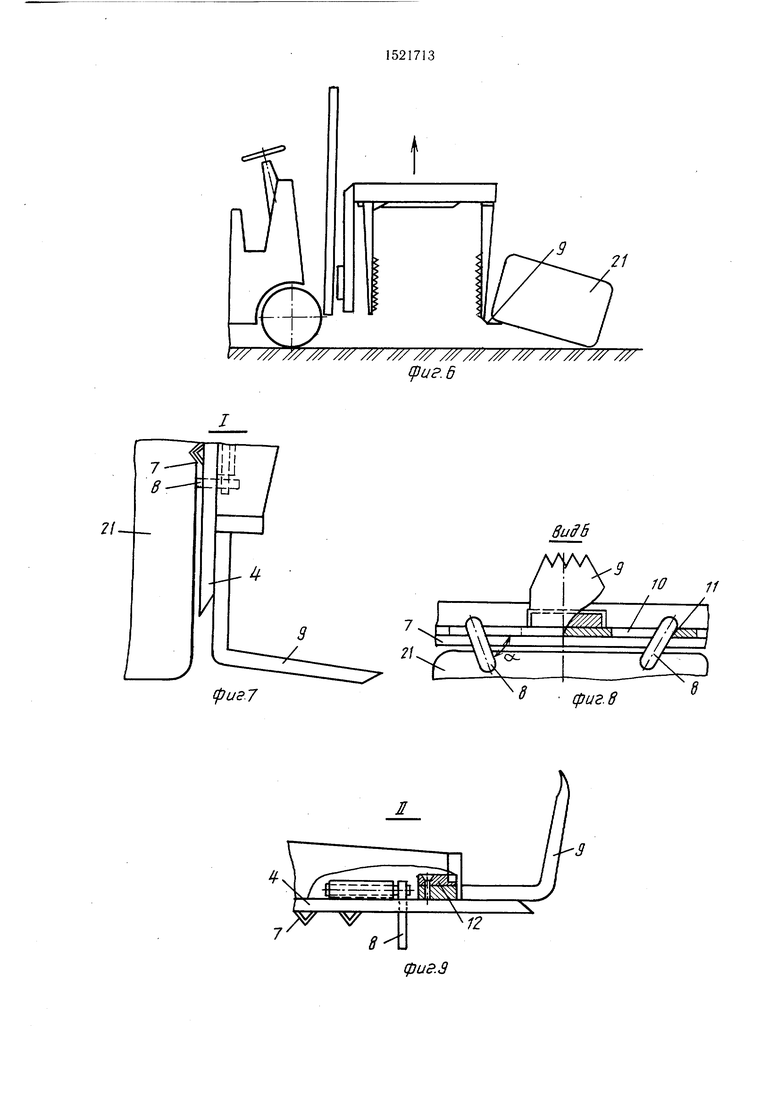
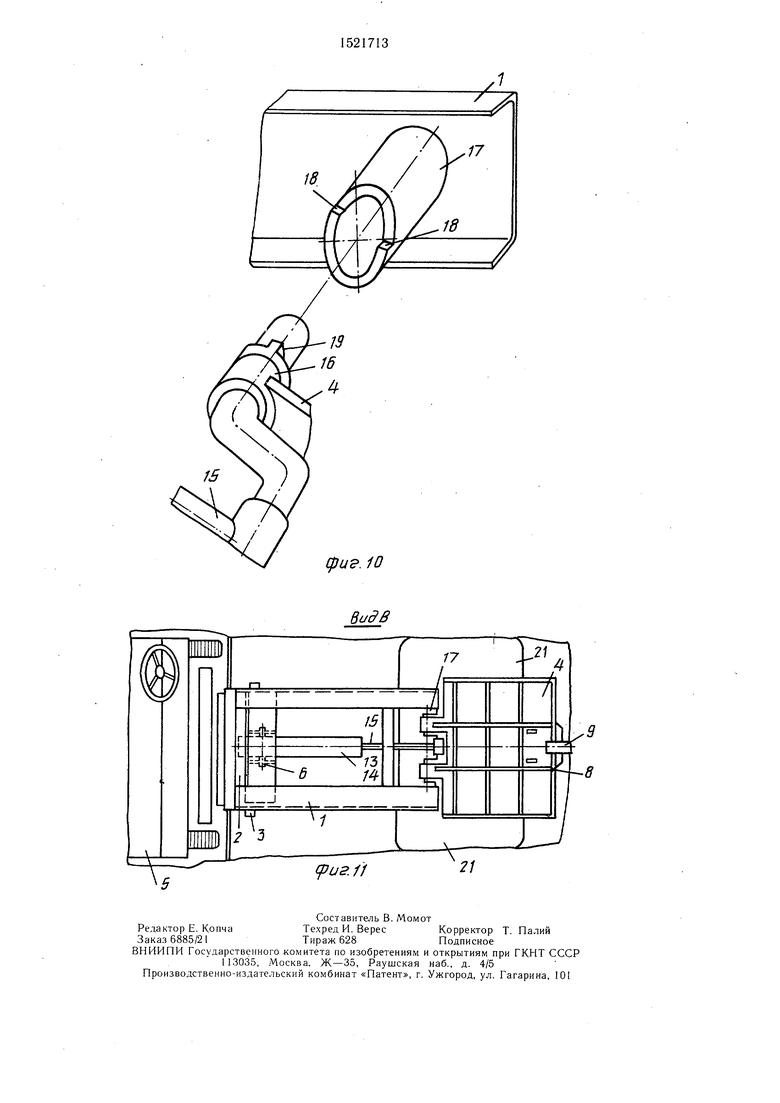
Н а фиг. 1 изображен захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захват в момент подтаскивания ближней кипы, общий вид; на фиг. 4 - захват при выгрузке наклонно лежаших кип и кип, удаленных от погрузчика, общий вид; на фиг. 5 - захват в момент выгрузки кип из крытых транспортных средств, общий вид; на фиг. 6 - захват в момент кантования кип, общий вид; на фиг. 7 - узел I на фиг. 1; на фиг. 8 - вид Б на фиг. 4; ка фиг. 9 ,- узел II на фиг. 4; на фиг. 10 - крепление поворотного прижима к раме и гидроцилиндру; на фиг. И - вид В на фиг. 5.
Захват погрузчика содержит навешиваемую на каретку последнего Г-образную раму 1 с поперечинами 2 и два вертикальных прижима 3 и 4.
Ближний к погрузчику 5 прижим 3 неподвижно крепится к каретке б, установленной в направляющих рамы 1 с возможностью поступательного перемещения и контакта с ближней поперечиной 2. Другой прижим 4 смонтирован на раме 1 с возможностью поворота между двумя крайними йоложени я- ми - горизонтальным и вертикальным. Оба прижима с внутренней стороны снабжены фрикционными накладками 7. Поворотный прижим 4 снабжен кривошипами 8 и L-об- разным зацепом 9, установленным с возможностью поступательного перемещения. Кривошипы 8 смонтированы с возможностью прохода сквозь лазы 10, выполненные на поворотном прижиме 4. При этом поворот кривошипов 8 ограничен скосами 1 1 стенок пазов 10, а движение L-образного зацепа 9 ограничено жестко присоединенным к ней стопором 12. Кривошипы 8 установлены на поворотном прижиме 4 таким образом, что при его вертикальном положении их враше- ние возможно в горизонтальной плоскости, а при его горизонтальном положении кривошипы 8 расположены под острым углом к его плоскости. Кроме того, прижимы 3 и 4 шарнирно соединены между собой гидроцилиндром 13, причем к прижиму 3 цилиндр 13 прикреплен корпусом 14, а к прижиму 4 - штоком 15. Ось шарнира крепления штока 15 к прижиму 4 смещена относительно оси щар- нира ее крепления к раме 1, выполненного в виде полуосей 16 и втулок 17. Втулки 17 жестко присоединены к раме 1 и имеют на своих торцах выступы 18. Полуоси 16 непод0
5
0
5
D
5
0
5
0
5
вижно присоединены к поворотному прижиму 4 и снабжены шипами 19.
Захват действует следующим образом.
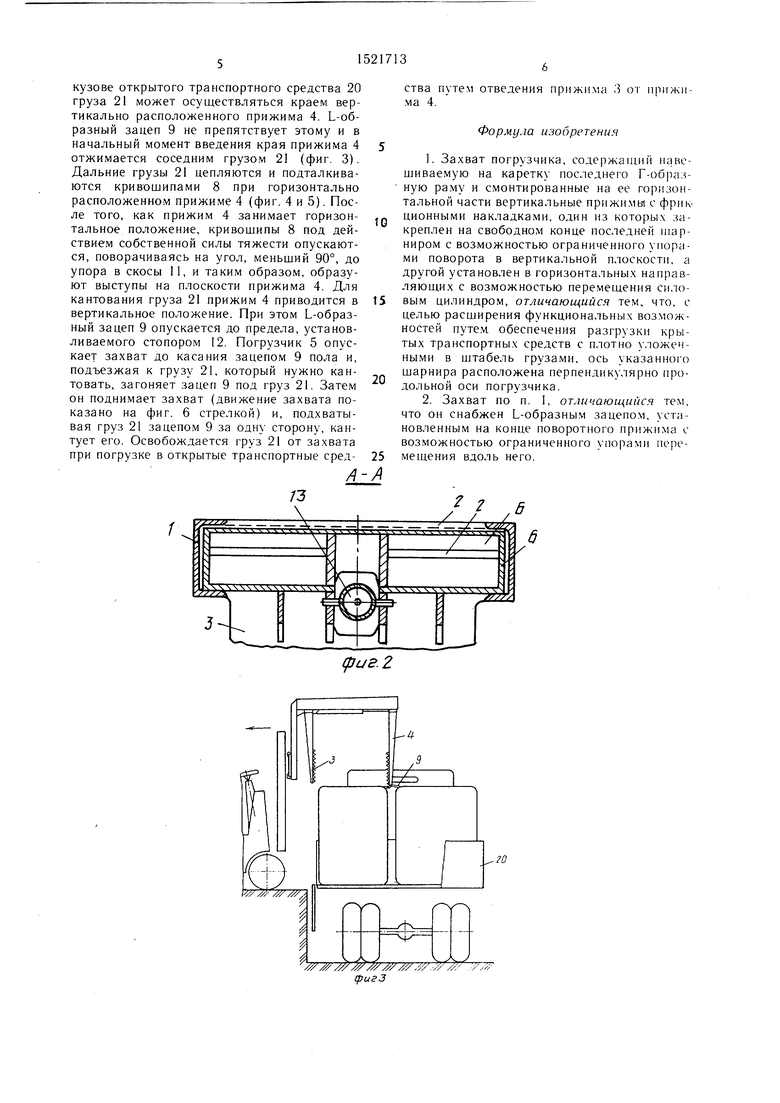
Погрузчик 5, оснащенный захватом, может выполнять выгрузку грузов из крытых и открытых транспортных средств 20 при произвольном расположении грузов в кузове, кантование, транспортирование и шта бели- рование грузов, а также погрузку грузов в открытые транспортные средства. Перед началом работы прижимы 3 и 4 усилием цилиндра 13 устанавливаются соответственно тем операциям, которые предстоит выполнить погрузчику 5. При полностью втянутом штоке 15 цилиндра 13 поворотный прижим 4 занимает вертикальное положение и к нему до предела поджат прижим 3. Вертикальное положение прижима 4, как и горизонтальное, контролируется упором щи- пов 19 полуосей 16 в выступы на торцах 18 втулок 17. Переход захвата в другое крайнее положение (при полностью выдвинутом штоке 15) осуществляется следующим образом. Вначале выдвижение штока 15 вызывает движение каретки 6 вместе с прижимом 3 по раме 1 в направлении погрузчика 5, в то время как прижим 4 сохраняет прежнее вертикальное положение. Это происходит в таком порядке, поскольку на перемещение каретки 6 по раме 1 цилиндру 13 требуется затратить меньше энергии, чем на поворот прижима 4. Смещение осей шарнира крепления щтока 15 и шарнира крепления прижима 4 к раме 1, благодаря которому ей передается вращающий момент от усилия штока 15, мало в сравнении с плечом ее собственной силы тяжести. Движение каретки 6 вместе с прижимом 3 в направлении погрузчика 5 и удаления от прижима 4 происходит до упора ее в ближнюю поперечину 2. Дальнейшее выдвижение штока 15 приводит к повороту прижима 4 до занятия им горизонтального положения. При втягивании цилиндром 13 штока 15 перемещение прижимов 3 и 4 происходит в обратном порядке: вначале, опускаясь, поворачивается прижим 4 до занятия предельного вертикального положения, а затем к нему начинает подтягиваться прижим 3 до полного втягивания щтока 15 цилиндром 13. Это происходит в таком порядке, поскольку сила тяжести прижима 4 препятствует перемещению каретки 6. Захват груза 21, например кип волокнистого материала (хлопка, вискозы и т. п.), осуществляется путем подтягивания цилиндром 13 прижима 3 к прижиму 4 и зажатия груза 21 между фрикционными накладками 7. При этом прижим 4 занимает вертикальное положение (фиг. 1), а кривошипы 8 заталкиваются грузом 21 в пазы 10 и тем самым не препятствуют работе захвата. Выгрузка грузов 21 из транспортных средств 20 производится путем подталкивания груза 21, а затем захвата его и доставки к месту назначения. Подтаскивание близлежащего в
кузове открытого транспортного средства 20 груза 21 может осуществляться краем вертикально расположенного прижима 4. L-об- разный зацеп 9 не препятствует этому и в начальный момент введения края прижима 4 отжимается соседним грузом 21 (фиг. 3). Дальние грузы 21 цепляются и подталкиваются кривошипами 8 при горизонтально расположенном прижиме 4 (фиг. 4 и 5). После того, как прижим 4 занимает горизонтальное положение, кривошипы 8 под действием собственной силы тяжести опускаются, поворачиваясь на угол, меньший 90°, до упора в скосы 11, и таким образом, образуют выступы на плоскости прижима 4. Для кантования груза 21 прижим 4 приводится в вертикальное положение. При этом L-образ- ный зацеп 9 опускается до предела, установ- ливаемого стопором 12. Погрузчик 5 опускает захват до касания зацепом 9 пола и, подъезжая к грузу 21, который нужно кантовать, загоняет зацеп 9 под груз 21. Затем он поднимает захват (движение захвата показано на фиг. 6 стрелкой) и, подхватывая груз 21 зацепом 9 за одну сторону, кантует его. Освобождается груз 21 от захвата при погрузке в открытые транспортные сред(риг. 2
o
5
0
5
ства путем отведения прижи.ма 3 от прижима 4.
Формула изобретения
///////////////////////////////// /у.
сриаН
///////////////////////////////////,
фиг. 5
8
// /// //7///////////////////////////////////////
фиг.7
/
(риг. 6
ви&5
10 //
фиг 8
I
фиаЗ
Сриэ. 10
| Устройство укладки и разборки штабеля штучных грузов | 1985 |
|
SU1397405A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
