(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноковшовый погрузчик | 1989 |
|
SU1682483A1 |
| Погрузчик для лесоматериалов | 1986 |
|
SU1399262A2 |
| Стреловой самоходный кран | 1985 |
|
SU1326541A1 |
| Одноковшовый погрузчик | 1987 |
|
SU1490234A1 |
| Гидропривод управления рабочим оборудованием гидравлического экскаватора | 1988 |
|
SU1546574A1 |
| Система управления ковша одноковшового экскаватора | 1988 |
|
SU1659601A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| Устройство для установки грузоподъемного механизма на транспортное средство | 1986 |
|
SU1493505A1 |
| Гидропривод мобильной машины | 1988 |
|
SU1643810A1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
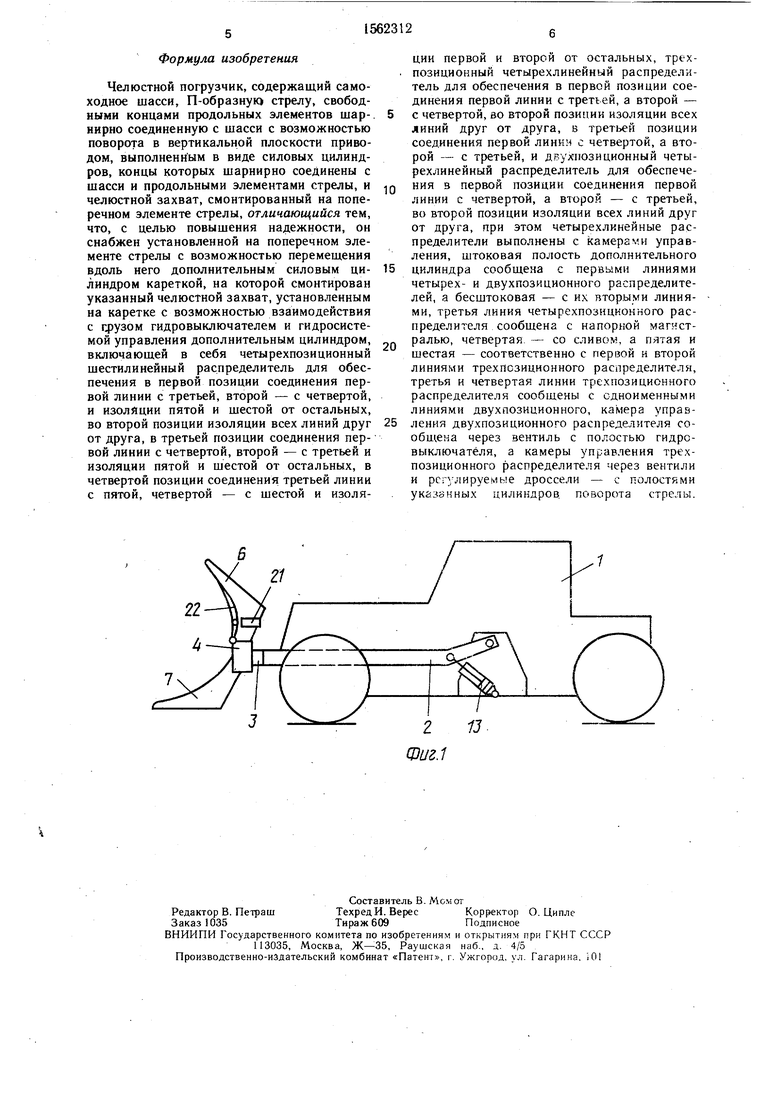
Изобретение относится к устройствам для подъема и перемещения грузов и может найти применение при погрузке длинномерных грузов типа труб или деревьев. Цель изобретения - повышение надежности. Челюстной погрузчик содержит базовую машину 1, шарнирно с ней соединенную стрелу 2 с гидроцилиндрами 13 и 17 привода. На поперечной балке 3 стрелы установлена в направляющих подвижная каретка 4 с верхней неподвижной 6 и нижней поворотной 7 челюстями. Гидроцилиндр 5 привода каретки 4 сообщен с гидрораспределителями 8 и 9. При захвате груза каретка 4 с грузом автоматически перемещается гидроцилиндром 5 в положение, при котором центр масс груза совпадает с серединой опорного контура. Управляющие сигналы подаются в камеры управления гидрораспределителя 9 от полостей подъема гидроцилиндров 13 и 17 привода стрелы. 2 ил.
ел
Од 1C
Од
N9
Изобретение относится к устройствам для одъема и перемещения грузов и может найи применение при погрузке длинномерных рузов типа труб или деревьев.
Цель изобретения - повышение надежности.
На фиг. 1 показан челюстной погрузчик, вид сбоку; на фиг. 2 - то же, вид сверху, и гидросхема.
Челюстной погрузчик содержит базовую машину 1, шарнирно с ней соединенную стрелу 2, включающую боковые балки и поперечную балку 3. На поперечной балке 3 становлена с возможностью перемещения в горизонтальных направляющих подвижная каретка 4, соединенная со штоком гидроцилиндра 5 привода, корпус которого соединен с поперечной балкой 3. На подвижной каретке 4 смонтирован челюстной захват, содержащий верхнюю неподвижную челюсть 6 и нижнюю поворотную челюсть 7. Полости гидроцилиндра 5 сообщены с четырехпози- ционным гидрораспределителем 8 и с управяемым трехпозиционным гидрораспределиелем 9.
Камера 10 управления управляемого гидрораспределителя сообщена линией управления через вентиль 11 и регулируемый дроссель 12 с полостью подъема гидроцилиндра 13 привода стрелы, а камера 14 управления сообщена линией управления через вентиль 15 и регулируемый дроссель 16 с гидроцилиндром 17 привода стрелы. В гидролинии, соединяющие гидрораспределитель 9 с гидроцилиндром 5, включен управляемый двухпозиционный гидрораспределитель 18 с подпружиненным золотником и камерой 19 управления,-соединенной линией управления через вентиль 20 с гидравлической полостью гидровыключателя 21. Гидровыключатель 21 установлен на подвижной каретке 4 и его шток связан с шарнирно установленным на каретке рычагом 22.
Челюстной погрузчик работает следующим образом.
В исходном положении (фиг. 1 и 2) стрела и нижняя челюсть опущены. Шток гидровыключателя 21 выдвинут пружиной, и золотник гидрораспределителя 18 перекрывает гидролинии, соединяющие гидроцилиндр 5 с гидрораспределителем 9. Все вентили открыты, и золотник гидрораспределителя 8 занимает нейтральную позицию
Для захвата груза поднимают золотник гидрораспределителя 8 до конца, подъезжают к штабелю деревьев и проталкивают нижнюю челюсть 7 под груз, а затем включают привод поворота челюсти 7. Нижняя челюсть 7 поднимает пачку груза и прижимает ее к верхней челюсти 6, осуществляя захват груза. При захвате груз нажимает на рычаг 22 и поворачивает его. Шток гид
0
ровыключателя 21 вытесняет рабочую жидкость в камеру 19 управления. Золотник перемещается влево и соединяет полости гидроцилиндра 5 с гидрораспределителем 9.
При захвате груза его центр масс не совпадает с серединой опорного контура, поэтому нагрузка от груза, передаваемая на штоки гидроцилиндров 13 и 17, различна по величине. Пусть, например, при захвате положение центра масс груза смещено вправо относительно середины опорного контура, расположенного ориентировочно на продольной оси погрузчика, тогда нагрузка, передаваемая стрелой на шток гидроцилиндра 17, больше, чем нагрузка, действующая от груза
на шток гидроцилиндра 13. Соответственно, и давление рабочей жидкости в бесштоковой полости гидроцилиндра доказывается больше, чем в бесштоковой полости гидроцилиндра 13. Поэтому золотник гидрораспределителя 9 под действием давления рабочей жидкости в камере 14 управления поднимается и сообщает штоковую полость гидроцилиндра 5 с напорной гидролинией, а бес- штоковую полость - со сливом через гидрораспределитель 8. Шток гидроцилиндра 5
5 вдвигается, перемещая подвижную каретку 4 и захват с грузом влево до тех пор, пока положение центра масс груза не совпадет с серединой опорного контура, что обусловливает одинаковую нагрузку, а следовательно, и одинакоЕгую величину давления в бесшто0 ковых полостях гидроцилиндров 13 и 17 и сообщенных с ними камерах 10 и 14 управления.
При выравнивании указанного давления в камерах управления золотник гидрорас5 пределителч 9 устанавливается в нейтральную позицию. Аналогично происходит и в том случае, если центр масс груза при захвате расположен слева от середины опорного контура, т. е. в любом случае положение
Q центра масс груза автоматически совмещается с серединой опорного контура. В случае необходимости можно отключать автоматическую систему путем перевода золотника гидрораспределителя 8 в нейтральную позицию или осуществлять ручное управле5 ние кареткой 4 путем переключения золотника в позиции, соседние с упомянутой нейтральной. Регулируемые дроссели 12 и 16 выполняют функции фильтров, предотвращающих переключение золотника гидрораспределителя 9 при случайных кратковремен0 ных изменениях давления в бесштоковых полостях гидроцилиндров 13 и 17.
Таким образом, повышение надежности достигается за счет автоматической ориентации положения центра масс груза относительно середины опорного контура погрузчика, и равномерного распределения внешней нагрузки на правую и левую боковые балки стрелы и на гидроцилнндры ее привода
Формула изобретения
Челюстной погрузчик, содержащий самоходное шасси, П-образную стрелу, свободными концами продольных элементов шар- нирно соединенную с шасси с возможностью поворота в вертикальной плоскости приводом, выполненным в виде силовых цилиндров, концы которых шарнирно соединены с шасси и продольными элементами стрелы, и челюстной захват, смонтированный на поперечном элементе стрелы, отличающийся тем, что, с целью повышения надежности, он снабжен установленной на поперечном элементе стрелы с возможностью перемещения вдоль него дополнительным силовым ци- линдром кареткой, на которой смонтирован указанный челюстной захват, установленным на каретке с возможностью взаимодействия с прузом гидровыключателем и гидросистемой управления дополнительным цилиндром, включающей в себя четырехпозиционный шестилинейный распределитель для обеспечения в первой позиции соединения первой линии с третьей, второй - с четвертой, и изоляции пятой и шестой от остальных, во второй позиции изоляции всех линий друг от друга, в третьей позиции соединения первой линии с четвертой, второй - с третьей и изоляции пятой и шестой от остальных, в четвертой позиции соединения третьей линии с пятой, четвертой - с шестой и изоляции первой и второй от остальных, Tptx- позиционный четырехлинейный распределитель для обеспечения в первой позиции соединения первой линии с третьей, а второй - с четвертой, во второй позиции изоляции всех линий друг от друга, в третьей позиции соединения первой линкч с четвертой, а второй - с третьей, и дг/хпозиционный четырехлинейный распределитель для обеспечения з первой позиции соединения первой линии с четвертой, а второй - с третьей, во второй позиции изоляции всех линий друг от друга, при этом четырехлинейные распределители выполнены с камерами управления, штоковая полость дополнительного цилиндра сообщена с первыми линиями четырех- и двухпозиционного распределителей, а бесштоковая - с их вторыми линиями, третья линия четырехпозиционного распределителя сообщена с напорной мап ст- ралью, четвертак - со сливом, а пятая и шестая - соответственно с первой и второй линиями трехпсзиционного распределителя, третья и четвертая линии трехпозиционного распределителя сообщены с одноименными линиями двухпозиционного, камера управления двухпозиционного распределителя сообщена через вентиль с полостью гидровыключателя, а камеры управления трехпозиционного распределителя через вентили и рс.1 лируемке дроссели - с полостями указанных цилиндров поворота стрелы
| Челюстной погрузчик | 1980 |
|
SU998325A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
