Фие. 1
Изобретение относится к робототехнике и может быть Использовано для оценки качества манипуляторных систем.
Цель изобретения - расширение технологических возможностей стенда за счет более полных испытаний поворотных манипуляторов.
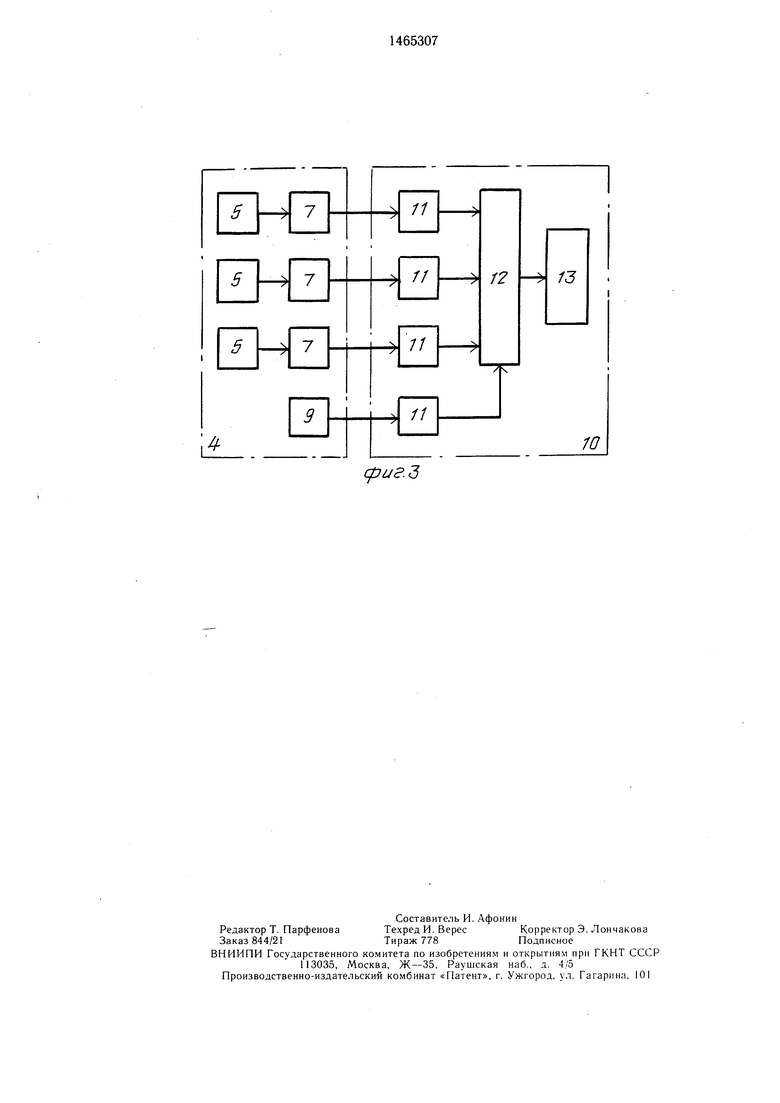
На фиг. 1 показан предлагаемый стенд, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - блок-схема измерительной части стенда.
Стенд содержит основание 1, на котором установлен испытуемый манипулятор 2 с поворотной стойкой 3, к которой прикреплена платформа 4. На платформе 4 расположены три барабана 5, установленные на 15 ходовых винтах через пружины с образованием винтовых пар (не показаны). На барабанах расположены тросы 6 и датчики 7 угла поворота. Тросы 6 соединены со схва- том 8 манипулятора 2. Платформа 4 снаботмечает перемещения платформы 4, т. е. угол поворота стойки 3 манипулятора и угловую координату схвата 8 в горизонтальной плоскости. Углы поворота барабанов 5 преобг разуются датчиками 7 в электрические сигналы, которые наряду с сигналами от датчика 9 перемещений подаются в индикаторы И, где преобразуются в цифровой код, а затем обрабатываются вычислительным блоком 12 и выдаются в виде распечатки циф10 ропечатающего блока 13. Оценка точности исполнения траектории производится методом сравнения траектории, заданной про-, граммой, с действительной траекторией движения схвата, определенной по результатам испытаний.
Формула изобретения
Стенд для испытания манипуляторов, содержащий основание, устройство для опредежена датчиком 9 перемещения относитель- 20 ления положения схвата испытуемого мани- но основания 1. Датчик 9 может быть вы-пулятора, выполненное в виде трех тросов и
трех барабанов, установленных на ходовых винтах через пружины с образованием винтовых пар и снабженных датчиками угла пополнен, например, в виде подпружиненного ролика с фотоэлектрическим преобразователем, выход которого соединен с информационно-вычислительным устройством 10, сое- 25 ворота, выходы которых подключены к ин- гоящим из индикаторов 11, вычислительного формационно-вычислительному устройству, блока 12 и цифропечатающего блока 13.
причем одни концы тросов закреплены на схвате испытуемого манипулятора, а другой конец каждого троса закреплен на соответствующем барабане, отличающийся тем,
Стенд работает следующим образом. Оператор включает информационно-выпричем одни концы тросов закреплены на схвате испытуемого манипулятора, а другой конец каждого троса закреплен на соответствующем барабане, отличающийся тем,
числительное устройство 10, фиксирует пер- ЗО что, с целью расширения технологических воначальную точку отсчета и включает пульт возможностей, он снабжен подвижной отно- управления манипулятора. Во время испол- сительно основания платформой, жестко связанной с поворотной стойкой испытуемого манипулятора, при этом барабаны установнения заданной траектории движения схвата манипулятора три барабана 5 вращаются соответствующим образом и связанные с
лены на платформе, а она снабжена датчиними датчики 7 угла поворота отмечают 35 ком перемещения, выход которого связа н с
информационно-вычислительным вом.
изменения положения схвата о в вертикальной плоскости, а датчик 9 перемещений
отмечает перемещения платформы 4, т. е. угол поворота стойки 3 манипулятора и угловую координату схвата 8 в горизонтальной плоскости. Углы поворота барабанов 5 преобразуются датчиками 7 в электрические сигналы, которые наряду с сигналами от датчика 9 перемещений подаются в индикаторы И, где преобразуются в цифровой код, а затем обрабатываются вычислительным блоком 12 и выдаются в виде распечатки цифропечатающего блока 13. Оценка точности исполнения траектории производится методом сравнения траектории, заданной про-, граммой, с действительной траекторией движения схвата, определенной по результатам испытаний.
Формула изобретения
трех барабанов, установленных на ходовых винтах через пружины с образованием винтовых пар и снабженных датчиками угла по ворота, выходы которых подключены к ин- формационно-вычислительному устройству,
ворота, выходы которых подключены к ин- формационно-вычислительному устройству,
причем одни концы тросов закреплены на схвате испытуемого манипулятора, а другой конец каждого троса закреплен на соответствующем барабане, отличающийся тем,
что, с целью расширения технологических возможностей, он снабжен подвижной отно- сительно основания платформой, жестко связанной с поворотной стойкой испытуемого манипулятора, при этом барабаны установлены на платформе, а она снабжена датчи ком перемещения, выход которого связа н с
информационно-вычислительным вом.
устроист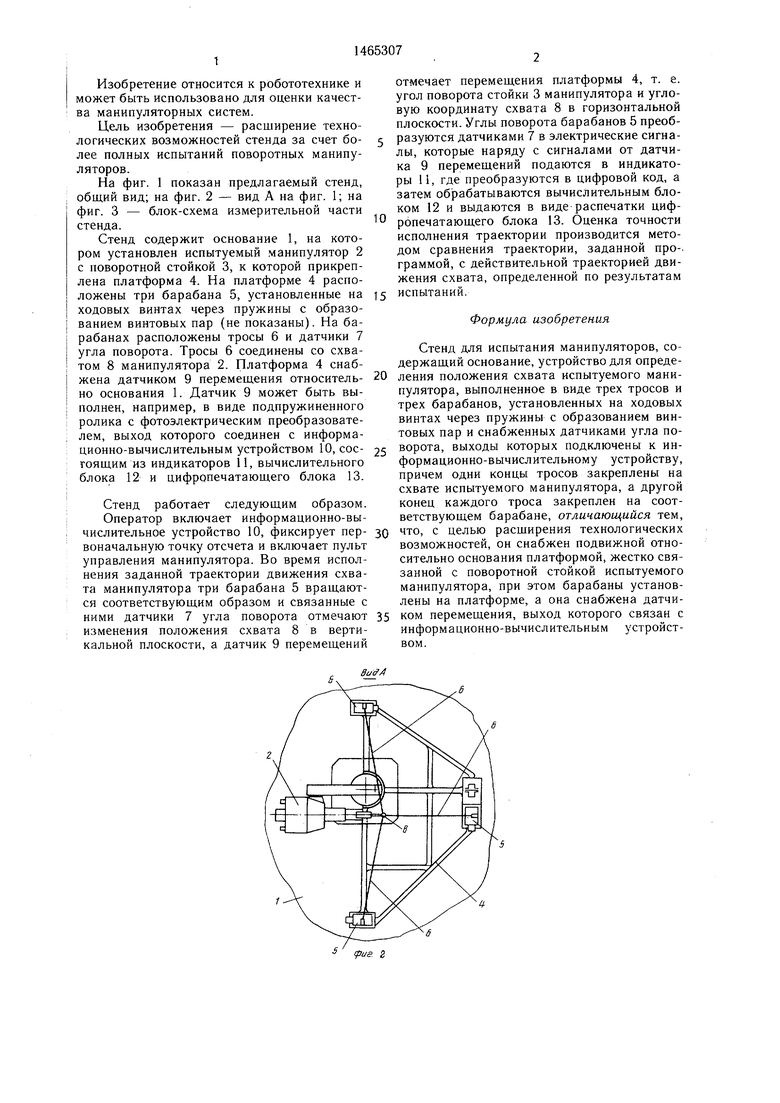
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания роботов-манипуляторов | 1984 |
|
SU1171308A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Стенд для испытания манипуляторов | 1988 |
|
SU1565676A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПНЕВМАТИЧЕСКИХ УДАРНЫХ ИНСТРУМЕНТОВ | 1991 |
|
RU2051022C1 |
| Стенд для динамических испытаний емкостей с жидкостью | 1987 |
|
SU1425510A1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765163C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765195C1 |
Изобретение относится к робототехнике. Цель изобретения - расширение технологических возможностей. Устройство содержит основание 1, на котором установлен испытываемый манипулятор 2 с поворотной стойкой 3. К стойке 3 прикреплена платформа 4, на которой расположены три барабана 5 с датчиками углов поворота. Схват 8 манипулятора 2 соединен с барабанами 5 с помощью тросов 6. Платформа 4 снабжена датчиком 9 перемещения относительно основания 1. При выполнении программной траектории перемещения схвата 8 его координаты фиксируются через изменения длин тросов 6 датчиками угла поворота барабанов 5 и датчиками 9 перемещения платформы. Сигналы датчиков поступают в информационно-вычислительное устройство, где осущетсвляется их обработка. 3 ил.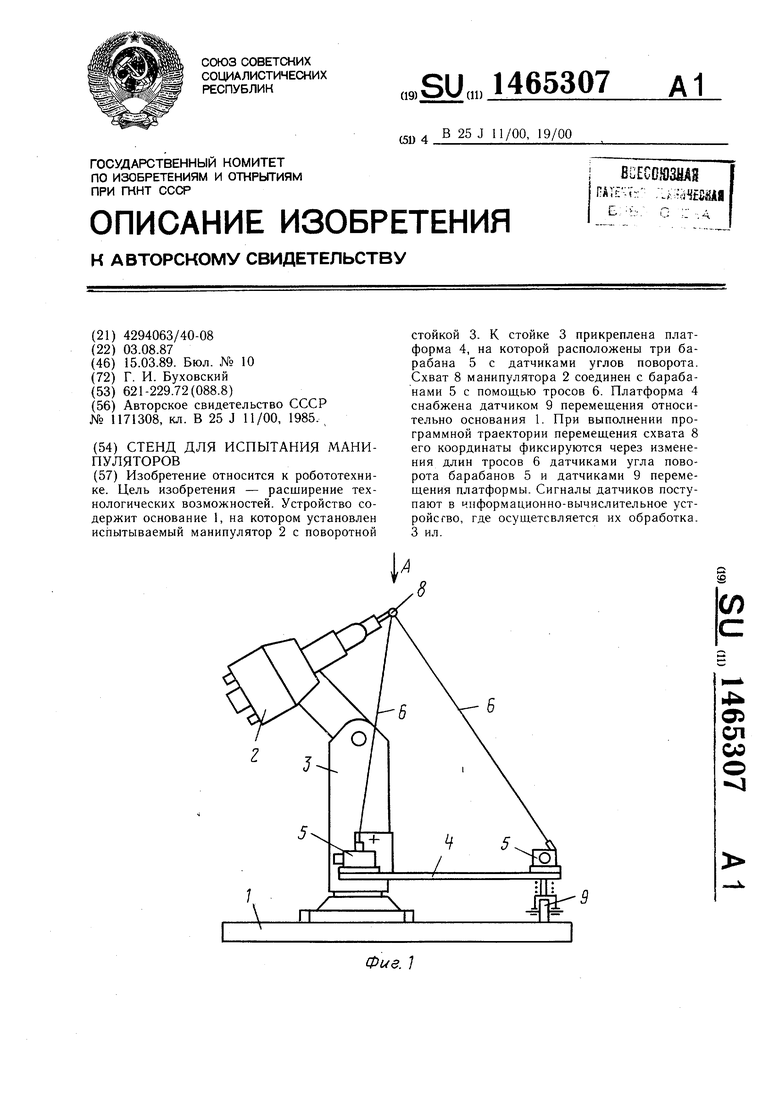
ipaa и
(риаЗ
| Стенд для испытания роботов-манипуляторов | 1984 |
|
SU1171308A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
