Изобретение относится к машиностроению и может быть использовано для оценки качества манипуляторных систем.
Цель изобретения - расширение функциональньк возможностей стенда за счет контроля траектории движения схвата манипулятора.
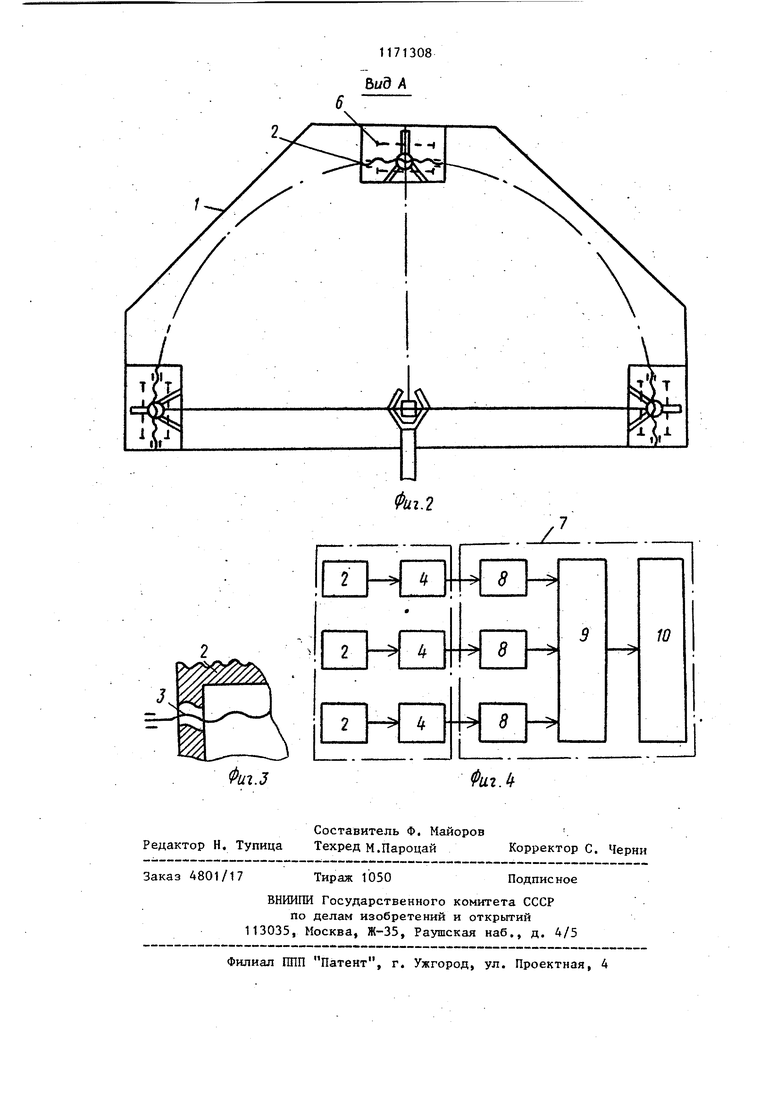
На фиг. 1 изображён стенд, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - барабан, разрез; на фиг. 4 - блок-схема стенда.
Стенд содержит устройство для определения положения схвата, которо установлено на основании 1 и выполнё но в виде трех барабанов 2, установленных на ходовых винтах 3 с образованием винтовых пар, снабженных датчиками 4 угла поворота и связанных с винтом через пружину (не показано)
На наружной поверхности барабанов 2 выполнена винтовая канавка, шаг которой равен шагу ходового винта, в которой расположены тросы 5, одни концы которых связаны между собой, а другой конец каждого троса 5 закреплен на барабане 2. Тросы установлены в направляющих 6.
Выходы датчиков 4 соединены с информационным устройством 7, состоя щим из индика оров 8,. соединенных с выходами соответствующих датчиков 4, вычислительного блока 9, подключенного к выходам индикаторов, и цифропечатающего блока 10, соединенного с выходом блока 9.
Стенд работает следующим образом.
Оператор фиксирует точку соединения тросов 5, находящихся в натянутом положении в схвате испытываемого робота-манипулятора,и включает информационное устройство 7 и пульт управления робота-манипулятора.
Во время исполнения заданной траектории движения схвата точка соединения тросов будет, описывать соответствующую траекторию движения схвата. При этом барабаны 2, соединенные с тросами 5, будут вращаться соответствующим образом, либо наматывая тросы на барабаны 2, либо разматывая их.
Ввиду того, что шаги винтовой канавки наружной и внутренней цилиндрической поверхности барабанов 2 равны, при разматывании или сматывании троса они будут перемещаться вдоль оси винта и расстояние между точкой касания троса 5 с барабаном 2 и направляющими 6 троса будут постоянным. Связанные с барабанами 2 датчики 4 угла поворота подают сигналы в аналоговой форме на соответствующие индикаторы 8, в которьк эти сигналы преобразуются в цифровой код и индицируются на табло индикаторов.
Далее сигналы в цифровом коде поступают на вычислительньй блок 9, в котором угловые перемещения барабанов преобразуются в координаты осей X, У и Z. Выход вычислительного блока 9 соединен с входом цифропечатающего блока 10.
Для робота с ЧПУ программа подготавливается на ЭВМ в виде перфоленты.
Перфолента через соответствующие блоки ЧПУ управляет траекторией движения схвата робота-манипулятора.
Перфолента, полученная с ЭВМ, сравнивается с перфолентой, полученной после прохождения цифропечатающего блока 10, и таким образом оценивается точность манипуляторной системы по всей траектории движения схвата.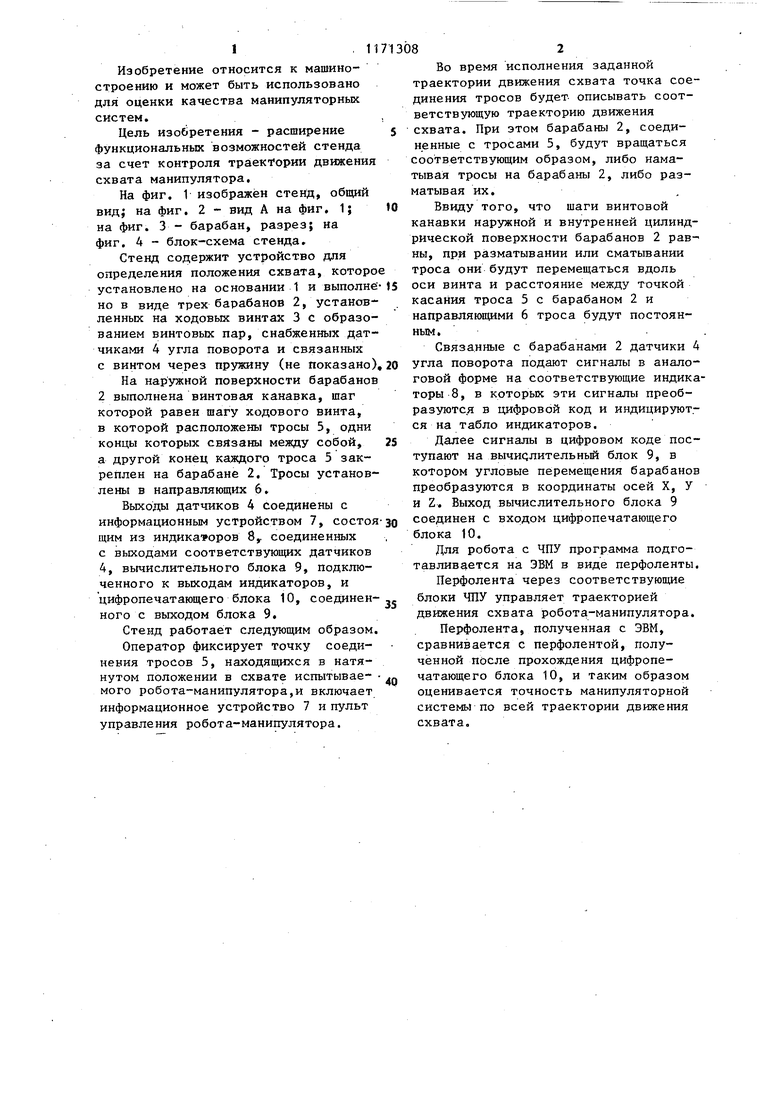
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания манипуляторов | 1987 |
|
SU1465307A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Промышленный робот | 1984 |
|
SU1299676A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Металлорежущий станок с ЧПУ | 1983 |
|
SU1138261A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Стенд для испытания манипуляторов | 1988 |
|
SU1565676A1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
1. СТЕНД ДЛЯ ИСПЫТАНИЯ РОБОТОВ-МАНИПУЛЯТОРОВ, содержащий устройство для определения положения схвата манипулятора и информационное устройство, отличающийся тем, что, с целью расширения функциональных возможностей за счет контроля траектории движения схвата манипулятора, устройство для определения положения схвата выполнено 6 1С СОЮ 1ДЯ I .; ч I SS .,,,,.„. ЬМ У ШУГ-г.1 виде трех тросов и трех барабанов, установленных на ходовых винтах через пружины с образованием винтовых пар и снабженных датчиками угла поворота, при этом на наружной поверхности каждого барабана выполнена винтовая канавка, шаг которой равен шагу ходового винта,одни концы тросов связаны мелзду собой,а другой конец каждого троса закреплен на барабане,кроме того,выходы датчиков угла поворота соединены с информационным устройством. 2. Стенд по п. 1, о т л и ч а ющ и и с я тем, что информационное а € устройство выполнено в виде индика(Л торов, вход каждого из которых соединен с выходом соответствующего датчика угла поворота, вычислительного блока, выходы которого соединены с выходами индикаторов, и цифропечатающего блока, подключенного к выходу вьшислительного блока. 1« СО О СХ5 5 Фи.г.1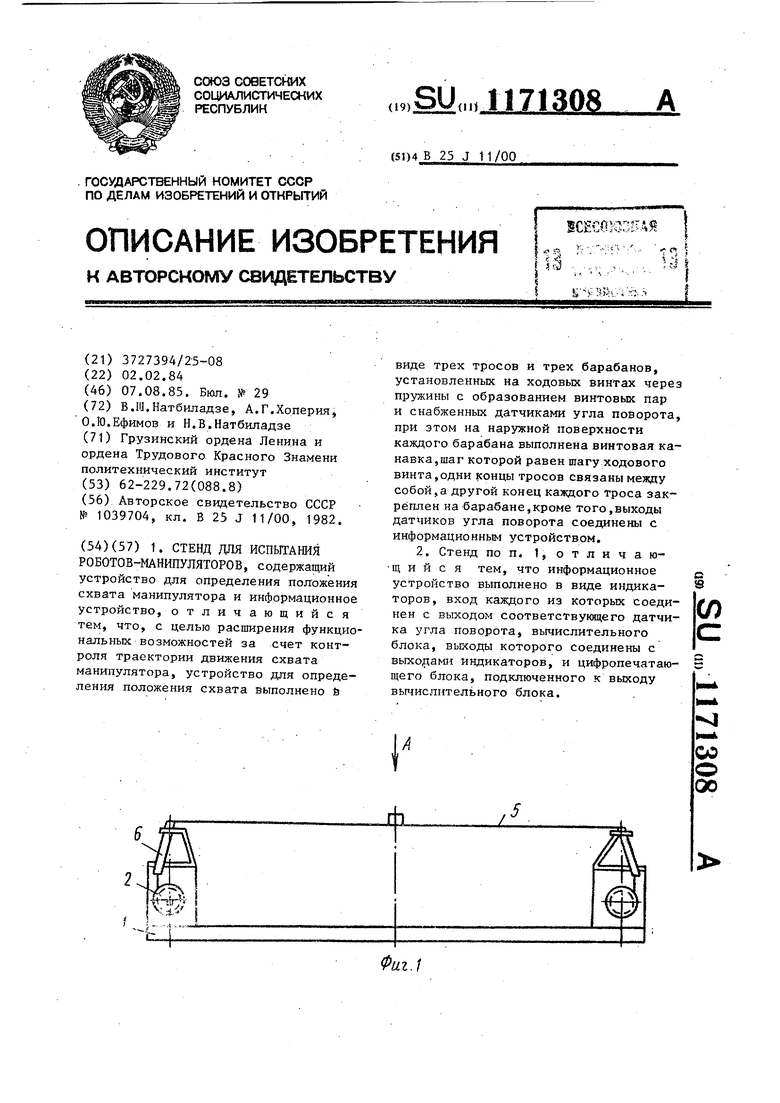
| Стенд для испытания промышленного робота-манипулятора | 1982 |
|
SU1039704A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
