Изобретение относится к инструментальным средствам судоходства, в частности к устройствам обеспечения безопасности судна.
Целью изобретения является повышение точности.
Сущность изобретения и его отличительные от прототипа признаки состоят в том, что положительный эффект достигается в результате того, что устройство реализует практическое измерение и определение абсолютных и относительных ускорений произвольной точки судна. Устройство .выполняет действия над электрическими сигналами, эквивалентными величинам составляющих определяемым физическим параметрам. Для любой точки внутри или на палубе судна, выбранной в качестве полюса и в которой установлено гироскопическое
устройство, состоящее из гировертикали и гироазимута, определение ускорений производится с использованием сопряженных посредством стабилизирующего устройства с гироскопическим устройством трех датчиков ускорений, например, акселербметриче- ского типа, размещенных по взаимно перпендикулярным направлениям. Таким образом, в любой момент времени и при любом положении судна направления измерения датчиков ускорений параллельны осям неподвижной системы координат О , |, г), Ј. Датчики ускорений измеряют проекции вектора линейного ускорения на оси f ,77, Ј неподвижной в пространстве системы координат. При этом проекции вектора линейного ускорения в контролируемой (произвольной) точке судна на оси подвижной OXYZ системы координат определяется следующим образом:
00
а чэ сх со
Причем 0cos cos -VJsin ; cos (p - 0 sin v cos p;
31816968 4
.aeE.e.K« « z-tb ll4 У v w , „
+ u,(coxXfQ,ytcozz)-xcoaj$ 50+Xcostfcosc YOom9cosM smq coata i o+a 2o+a« o zx c) z -co%9sin)4Z(cos9coBq 5 nq)45iin95inq))
+ .савгЬ(а«)g o+X,;Wq,cosq,.+ Y(co50co6(f+5m9s:ncpx
иг-амХв+але.а„.,х + -xeJn ZCcoseslmfemu-einQcoecp)}
+ C07()-ZCCIZ.L v , N/ , л
Здесь: х, у, г - координаты произвольной f4e-xe « Ye.«9cosVtZco59coe. точки судна от полюса в системе координатПри этом координаты места, в котором YXZ. Р установлено устройство в системе коорди311812313 1нет Ј,1/иЈ:
821322333 V - направляющие косинуса,
аз1аз2эзз j& rj0 //#оdt: & . которые через тригонометрические функции углов качки судна (углы крена, диффе- 15 рента, рыскания) определяются следующим образом: ог
an cos pcos V : OЈ Ј-0sinV.
ai2 sln yeasty ;На фиг.1 дана укрупненная функцио
ai3 - -sin , 20нальная схема устройства для определения
321 sin sfn p ;ускорений произвольной точки судна; на
322 cos в cos р + sin 0 sirup sin ;фиг.2 - функциональная схема соединений
823 sin в cos rfr,блока вычисления выходных координат с
аз1 cos Ocosp slnV + sin 0 sln :другими блоками устройства: на фиг.З- фуназ2 cos 0sln p sin - sin в cos у ; °кциональная схема блока вычисления выазз соз 0COS V-ходных координат; на фиг.4
о -у sin t/г;функциональная схема блока производных
(Uy c6s V sin d+ cos 0;и тригонометрических функций; на фиг.5 ) cos ipcos-O-t/t sin в , „пфункциональная схема блока вычисления
Скорости угловых перемещений судна 30направляющих косинусов (ац. 321, aat an,
в,ф,ф определяются путем дифференци-822.аз2.aia,323,азз);нафиг.6-функциональрования соответствующих угловых переме-ная схема блока вычисления квадрата углощеиий, угловая скорость судна - Of.вой скорости судна ft/2; на фиг.7 ЗЕфункциональная схема блока вычисления
и/2 о + а$ + 0%.проекций углового ускорения й,
на фиг.З - функциональнзя схема блока вы&f,&, dh- проекции углового ускорения числения произведений (Ai, A2 и Аз); на
на оси OXYZ, определяются какФиг-9 Функциональная схема блока вычис, -....., 40ления проекций относительного линейного
)-1рс| со5((5ускорения wy, wx и wz; на фиг.10 - функциоw tpcosi sine-K cose qifGcosQcosv-нальная схема блока вычисления проекций
-Vsmvs;ne)-(i95inS-мгновенной скорости w,,wa и wf; на фиг. 11
и .io л п г . /, функциональная схема блока дифферен««-jeoeveo.Q.me-c, (V9inV«oee циаторов; на фиг.12 - функциональнзя )-veeose.ма блока пересчета координат; на фиг.13При этом абсолютные линейные ускоре-функциональная схема блока вычисления
, ния для корректировки взвешивания элект-проекций абсолютного линейного ускореронных морских весов определяютсяния w W|z и wt
следующим образом:50 Устройство для определения ускорений
Ј . Y ,произвольной точки судна содержит три
wrv°ta u Ј+wr(arT+Me Ј)-« Чзвзаимно перпендикулярных датчика ускоре Nj « jl w lf-co cj uY +Wjg+Wf l-co jний 1 - j/o, 2-|о и 3 - , установленных
.,.(ш«Г+(а,г+(а,, помощью стойки 4 на .стабилизированной
. 55 платформе 5, механизм разворота которой
u .. со,,,--.связан с блоком гиростабилизации 6 платs dt J l dt «Г dtформы 5 относительно корпуса судна 7 таКоординаты произвольной точки судна в си-ким образом, что геометрические оси двух
стеме координат Ј, rj, и С определяют-датчиков ускорений TJO - 1 и |0 - 2 располося таким путем:жены в параллельной палубе судна плоскоПричем 0cos cos -VJsin ; cos (p - 0 sin v cos p;
rj0 //#оdt: & ог
OЈ Ј-0sinV.
сти, причем один из них ориентирован перпендикулярно диаметральной плоскости судна Ј0 - 3 и жестко установленные относительно корпуса судна 7 в месте размещения датчиков ускорений 1,2 и 3, причем блок 5 гиростабилизации 6 содержит блок выработки углов крена в, дифферента рыскания р, выполненный, например, в виде гировертикали и гироазимута, причем блок гиростабилизации 6 платформы 5 подклю- 10 чен управляющим выходом к механизму разворота стабилизированной платформы 5, а информационный выход блока гиростабилизации 6 платформы 5 подключен ко входу первого блока усилителей 8, содержит 15 второй блок усилителей 9, третий блок усилителей 10, задатчик пространственных координат 11-Y, 12-Х, 13-Z, задатчик времени интегрирования ti и его корректи- ровки tz- 14, усилитель 15, при этом выходы 20 задатчика пространственных координат 11, 12, 13, задатчика времени интегрирования и его корректировки 14, блока взаимно перпендикулярно расположенных датчиков ускорений 1, 2 и 3 подключены 25 соответственно ко входам второго блока усилителей 9, усилителя 15, третьего блока усилителей 10, выхода первого 8 и второго 9 блоков усилителей, усилителя 15, третьего блока 10 усилителей подключены соответст- 30 венно к первому, второму, третьему, четвертому входам блока вычисления выходных координат 16, содержащий блок вычисления 17 производных и тригонометрических функций, первый, второй и третий входы 35 - которого являются соответственно первым, третьим и четвертым входами блока 16, первый и второй выходы которого подключены соответственно к первому и второму входам блока индикации 18. Блок вычисления вы- 40 ходных координат 16 содержит блок 19 вычисления относительных ускорений wy, wx и wz и блок 20 вычисления абсолютных ускорений Wjf , wa и w§ . Блок 19 вычисления относительных ускорений w, w, и w. Блок 19 вычисления относительных ускорений 45 wy, wx и wz содержит блок 21 вычисления направляющих косинусов (ац, 321, аз1, 312, а22, аз2, ai3, Э23, азз), блок 22 вычисления
квадрата угловой скорости а и проекций мгновенной скорости toy , и оъ на координатные оси Y, X и Z, блок 23 вычисления ( углового ускорения щ , их и ftfe на коор- .динатные оси Y, X и Z, блок 24 вычисления произведений сигналов (Ai, A2 и Аз), блок 25 вычисления проекций вектора относитель- ного линейного ускорения wy, wx и wz, причем последовательно соединены блок вычисления направляющих косинусов 21.
50
55
5 10 15 20 25 0 5 0 5
(
0
5
блок вычисления квадрата угловой скорости 22, блок вычисления произведений 24, блок вычисления проекций относительно линейного ускорения, выход которого является первым выходом блока 16, второй вход - вторым входом блока 16 и подключен ко второму входу блока вычисления произведений 16, третий вход подключен к четвертому входу блока 16, первый вход блока вычисления произведений 24 подключен к первому выходу блока вычисления квадрата угловой скорости 22, а второй вход блока вычисления произведений 24 подключен ко второму входу блока вычисления произведений 16. Блок 20 вычисления абсолютных ускорений w , w7 и WЈ содержит блок 26 вычисления проекций мгновенной скорости судна , о) на координатные оси Ј, г иЈ , блок 27 дифференциаторов, в котором вычисляются проекции углового ускорения а), «и,и ft);на координатные оси |,7иЈ . блок 28 пересчета координат f , rj и Ј и блок 29 вычисления проекций абсолютного линейного ускорения w , w7n We , причем последовательно соединены блок вычисления проекций мгновенной скорости 26, блок дифференциаторов 27, блок вычисления проекций абсолютного линейного ускорения 29, выход которого является вторым выходом блока 16, второй вход подключен к четвертому входу блока 16, а также блок вычисления проекций углового ускорения 23, блок пересчета координат произвольной точки 28, выход которого подключен к третьему входу блока вычисления проекций абсолютного ускорения 29, первый вход - ко второму входу блока 16, второй вход к первому выходу блока вычисления производных и тригонометрических функций 17, второй, третий и четвертый выходы которого подключены соответственно к входу блока вычисления проекций мгновенной скорости 26, к первому входу блока вычисления проекций углового ускорения 23 и ко второму входу блока вычисления квадрата угловой скорости 22, пятый и шестой выходы - к первому и второму входам блока вычисления направляющих косинусов 21, второй выход которого подключен ко второму входу блока вычисления проекций углового ускорения 23, третий выход к четвертому выходу блока вычисления проекций относительно линейного ускорения 25, пятый и шестой входы которого подключены соответственно к выходу блока вычисления проекций углового ускорения 23 и ко второму выходу блока вычисления квадрата угловой скорости 22, который подключен также к четвертому входу блока вычисления проек71816968 8
ций абсолютного линейного ускорения 29,wy. wx и wz, а с блоком 23 вычисления проекпятый вход которого подключен ко второмуций углового ускорения щ , «и и ah на коорвыходу блока вычисления проекций мгно-динатные оси Y, X и Z с помощью
венной скорости 26.электрических цепей произведения электБлок 17 вычисления производных и 5рических сигналов (cos 0), произведетригонометрических функций связан с пер-ния электрических сигналов (cos 0cos V) и
вым блоком усилителей 8 по электрическимпроизведения электрических сигналов
цепям углов рыскания р, дифферента Vй(sin ty sin в ), при этом блок 22 вычисления
крена в, с третьим блоком усилителей 10 поквадрата угловой скорости судна о и проэлектрической цепи времени интегрирова- 10екций мгновенной скорости судна
ния ti и его корректировки t2, с усилителемщ и на координатные оси у, X и Z
15 чпо электрическим цепям ускоренийсоединен с блоком 24 вычисления сигналов
4, %и соединен с блоком вычисления на-(Al, дг и Аз) с помощью электрических цепей
правляющих косинусов 21 (an, aai. asi. aw, и а также с помощью электРичеа22 а32, ai3, ааз, азз) с помощью электриче- к
ских цепей синуса, косинуса угла крена, «к т н ™ sin в, cos в, синуса, косинуса угла диффе-«Г связан с блоком 25 вычисления проекций рента sin V- cos V , синуса, косинуса углаотносительного ускорения Wy.-Wx и wz, при- рыскания sin «), cos р , а также связан счем блок 23. вычисления проекций углового помощью электрических цепей первой про; 20ускорения Щ, а и ofe на координатные оси изводной. синуса, косинуса угла крена в,V, Х(И Z с помощью электрических цепей sin в, cos 0 . первой производной, синуса%, ОД и % соединен с блоком 25 вычисле- угла дифферента ф, sin V. первой произ-ния проекций относительного линейного ус- водной изменений угла рыскания фскорения wy, wx и wz. при этом блок 24 блоком 22 вычисления квадрата угловой 25вычисления произведений сигналов (Ai, A2 2 ,и Аз) соединен с вторым блоком 9 усилите- скорости судна о/ и проекций мгновеннойдвй с оомощью электрических цепей сигна- скорости судна Щ , ОД, и ftfe на координат-„ов сопутствующих координатам ные оси Y, X и Z, соединен с блоком 23произвольной точки судна по направлению вычисления проекций углового ускорения до у, х и Z, датчиков ускорений 1, 2, 3 % . а и аъ на координатные оси Y, X и Z сотносительно места их установки и с блоком помощью электрических цепей второй, пер-25 вычисления проекций относительного вой производной, синуса, косинуса угла кое-линейного ускорения wy, wx и wz с помощью на V ,V sin У , cos V , второй, первойэлектрических цепей произведений сигна- производной, синуса, косинуса угла диффе- 35лов (Al, АЗ и Аз), причем блок 25 вычисления рента V. V. sin V - cos V, второй, первойпроекций относительного линейного уско- производной изменений угла рыскания р.рения щ wx и т связан с помощью элект: р, а также с помощью электрических цепейрических цепей проекций вектора первой производной изменений угла кренаотносительного линейного ускорения wy и О, первой производной, синуса, косинуса уг- 40wx. wz с блоком индикации 18 и с помощью ла дифферента ф, sin V-cos V первойэлектрических цепей сигналов, соответству- произв дной, синуса, косинуса угла рыска-ющих координатам произвольной точки суд- ния ф, sin р, cos р , координат местана по направлению осей Y, X и Z датчиков Јо , и о , в котором установлено устрой-ускорений 1. 2 и 3 относительно места их ство в системе координат Ј,)/nЈ t с бло- 45установки, абсолютных ускорений ком 20 вычисления абсолютных ускорений|о , $, и Ј места, в котором установлено ус- wf, w, и w,; , причем блок 21 вычислениятройство в системе координат |, г и со- , направляющих косинусов (an, aai, 331, an,единен со вторым блоком 9 усилителей и с 822. аз2 , an, 823, азз) соединен с блокомусилителем 15, а блок 20 вычисления абсо- вычисления 22 квадрата угловой скорости gOлютных ускорений Wy , w, и w§ с помощью судна оЯи проекций мгновенной скоростиэлектрической цепи вычисления квадрата судна щ , «УХ и ufe на кобрдинатные оси Y,угловой скорости а связан с блоком 22 X, г с помощью электрических цепей произ-вычисления квадрата угловой скорости о и ведения электрических сигналов (cos .mпроекций мгновенной скорости судна в ) и произведения электрических сигна- 55 на координатные Роси Y, Х и Z
SS auSTSr SSK -19ЛчислениРяотносительныхускоре% % 2 ческНк7 ГТДНЫбХИТРТОМеТРИ ческих функций связан с блоком 26 вычисле91816968 Ю
ния мгновенной скорости ,wfи%начисления синуса угла дифферента sin , координатные оси Ј,7иЈ с помощьюблок 37 вычисления косинуса угла диффе- электрических цепей первой производнойрента cos V- через первый блок усилителей угла крена 0, первой производной, синуса,8 соединены с помощью электрической це- косинуса угла дифферента ф, sin ty , cos .5пи сигнала угла дифферента грс гировер- первой производной, синуса, косинуса уг- тикалью блока гиростабилизации б, блок 38 ла рыскания ф, sin p , cos p , а с блоком 28вычисления первой производной измене- вычисления координат Ј,«7иЈ промзволь-ний угла рыскания Ј, блок 39 вычисления ной точки в системе координат |, ц И Ј свторой производной изменений угла рыска- помощью электрических цепей синусе, ко- Юния ф, блок 40 вычисления синуса угла ры- синуса угла дифферента sin ф, cos #, сииу-скания sin $p, блок 41 вычисления косинуса са угла рыскания sin координат местаугла рыскания со Ј, черва первый блок I о, П о и &,, в котором установлено устрой-усилителей 8 СВЯЗАНЫ с помощью электричество в системе координат |, q И Ј, при этомских цепей сигнала угла рыскания fp с гиро- блок 27 вычисления проекций угловогоуско- 15азимутом вяока гиростабилизации 6, блок ренияй о иь) на координатные оси42 интегрировании $, блок 43 интегриро- |, ц и Ј с помощью электрических цепейваиия |о, блок 44 интегрирования ijb, блок проекций углового ускоренияw 4f т ы$ не45 интегрирования ijb, блок 46 ннтегриро- координатные оси |, ц м(; соединен свания $, блок 47 интегрирования &, че- блоком 29 вычисления проекция абсолют- 20рез блок IS формирования входных ного линейного ускорения w , «г и w.сигналов соедммвму с датчиками ускорений который с помощью электрической цепи1,2 и 3, блок 48 симхронмэации через третий квадрата угловой скорости of связан с бяо-в 0« 0 связей с блоком 14 эада- ком 22 вычисления квадрата угловой скоро- времени интегрирования ti и его кор- сти « и проекций мгновенной скорости щ. о, и на координатные оси V, X и скрв«Г| о« ЭТТ-числени вто- помощью электрических цепей проекций произааджЛ изменений угла диффе- мгновенной скорости ,И« не ко- eP°5u ; 39 вычисления ординатныеоси |,V и, с помощью влек- 30npOK3BOJMOft „вменений угла рыскания трических цепей координат |,(; совдимвны с блоком 23 вычисления проек- проиэеолмой точки в системе координатJ «о, и ед „Тко.
.
.rf.tJS,Tss.
тройство в системе координат | , иС с«J. И9мвнвмий , рыскания
усилителем датчиков ускорений 1, 2 и 3 от-ф элвктричвски см$аны с блоком 22 вычисносительно места их установки, причем 40г, г „
блок 29 вычисления проекций абсолютноголения.квадрата угловой скорости of и пролинейного ускорения wf , w, и w с по-екций мгновенной скорости с.ОДиедна
мощью электрических цепей проекций аб-координатные оси Y, X и Z, блоком 23 вычиссолютного линейного ускорения w , w и wtления проекций углового ускорения
связан с блоком 18 индикации. 45Щ , Ук и оъ на координатные оси Y, X и Z, и
8 блоке 17 вычисления производных иблоком 26 вычисления проекций мгновентригонометрических функций содержитсяной скорости а, о и а на координатные
блок 30 вычисления первой производной из- .оси Ј,/иЈ, выходные каналы блока 32
менений угла крена 0, блок 31 вычислениявычисления синуса угла крена sin 0, блока
второй производной изменений угла крена 5033 вычисления косинуса угла крена cos В,
и, блок 32 вычисления синуса угла крена sinблока 36 вычисления синуса угла дифферен0, блок 33 вычисления косинуса угла крената sin тр, блока 37 вычисления косинуса угла
cos в, через первый блок 8 усилителей свя- дифферента cos соединены с блоком 21
заны с помощью электрической цепи сигна-направляющих косинусов (an, 321, 33-1/312,
ла угла крена в с гировертикалью блока 5Е5аа2, аза, ais, 823, азз), блоком 22 вычисления
гиростабилизации 6, блок 34 вычисленияквадрата угловой скорости о и проекций
первой производной угла дифферента #мгновенной скорости «,„, . на коблок 35 вычисления второй производной из-ординатные оси Y, X и Z, блоком 23 вычисменений угла дифферента блок 36 вы-ления проекций углового ускорения
111816968 12
GJ§ . ftg и ftl на координатные оси Y, X и Z, связан блок 53 перемножения sin p на cos
причем блок 36 вычисления синуса угла диф- .соединенный также с блоком 41 вычислеферента sin VH блок 37 вычисления косину- ния косинуса угла рыскания cos p, с котоса угла дифферента соз tA также рым связан также блок 54 перемножения
электрически связаны с блоком 26 вычисле- 5 cos jj на cos У соединенный также с блония проекций мгновенной скорости ком 33 вычисления косинуса угла крена cos
йь.аьите на координатные оси 0, блок 55 перемножения sin 0 на cos 0свя| и и С, и блоком 28 вычисления координат « с блоком 37 вычисления косинуса угла
Ј, иЈ произвольной точки в системе ко- €А Дифферента cos #и блоком 32 вычисления
ординат |:, и иЈ, выходные каналы блока 10 синУса Углавкрена-eta 0, с которым соеди40вычислениясинусауглврысй8ния81п и иен также блок 56 перемножения sin 0 на
блока 41 вычислении косинуса угла рыске- 8|п связанный с блоком 40 вычисления
ния cos tf соединены с блоком 21 вычиеле- синуса угла рыскания sin ft блок 57
ния направляющих косинусов (an, «t, в31, ,. перемножения sin 0 не соединен с
821.322, assets. 823,833). блоком 2веычисяв- ™ 32 вычисления синуса угла крена
ния проекций мгновенной скорости Sin 0 и блоком 41 вычниения косинуса угла
шг.аьиах на координатные оси |,юЈ, рыскания cos р , блок 58 перемножения
при этом блок 40 вычислений синуса угла прошведеиия (сое sln на sin Vсвязан
рыскания slit Ф аявктртвски связан «- с вычисления синуса угла диффвс блоком 28 вычисления коордияат цента sin и блоком 52 перемножения
|, q и пршзвойьнойточкивсйствмвкоор- сов вив sin i , с которым также соединен
динат |, я И. причем блок 42 митвгрирв- инвертор S9 произведения (cos 0 sin p),
вания Ј через блок 43 йнтвг ршвнмя $, 80 перемножения sin в на зГп V связан
блок 44 интегрирования Ј черва блок 45 «« « 3 вшмсявния синуса угла диффеинтегрирования бжж 48 интегрмроаа- W рвитавШ яблоком 32 вычисления синуса
ния 8Гчер з бяш 47 огрирооаиия fe, Т8к«в через блок 61
соединены Гблоком28вач1 еи оо - ©Р жвний ороизэедешИзГп sln $
нат f ,«Ј Пршз8ояьмойт1тиве ст® иас°8 .еоединвмНогосблоком41 вычискоординат ,Прй8т0М8йО«48сш- 30 ««« ««ей рмскания -с; су хронизации еш.8 е бмжом Telje« J прривмдвни (ein 0
42 интегрмро0ан«1я 6яош«43 иитегрй- 8fn )«Kot« shi А который связан
рованш &.блоком44МнтефКрсюшш1 , 2«Y е, 59 произведения
блоком 45 интегрийованш , блоком 48 | 8gjft ff HTTST
интегриТнийГТ1 47йнте 35 BTeSiUi SU
Ь°-ком 40 вычислены синуса угла рыскания
8 блоке 21 вычисления напгкшляяедрх 8|n y f а такж@ е еуммвтором м произведекосинусов (an, 821, аз1, an, ааг, аза, ais, 823, „ (8{пв s,nҐ 8 j и Ссо80 y j который
азз) блок 49 тфемндашнмя сое р на сое совдинвн с 6яоком 54 перемножения
соединен с блоком 33 вычие жш косину- ,40 вредив сое, смааияого с блоком 65 пвраса угла крена cos 9w блоком 37 вычисления множвния произведения (cos cos У) на slnf
угла дифферента сое J. е которым аявкт- й соединенного с блоком 36 вычисления сирически связан блок 50 перемножения cos „у дифференте 8ln r, сумматор 66
на cos V. соединенный также с блоком произведений fcos cbsV slnV) и (sln x )
41 вычисления косинуса угла рыскания сое 5 С00динен с блоком 65 перемножения произ р, инвертор 51 синуса угла дифферента (вЮ ведения (cos§ cos ) на 8(пГ и блоком 56
V), электрически связан с блоком 36 вычис- перемножения sln0 на sin У, а инвертор 67
ления синуса угла дифферента (sin #), блок произведения (slnecos O соединен с блоком
52 перемножения сое в на sin p соединен §7 перемножения на cos и сумматором
сблокомЗЗвычислениякосинусауглакрена w 68произведений(cos0slnVsln H(-sln cosrl,
cos в и блоком 40 вычисления синуса угла который связан также с блоком 58 перемнорыскания sin р, с которым электрически жения произведения (совв sin V) на sinT.
В блоке 22 вычисления квадрата угловой скоростной проекций мгновенной скорости WS«,H z на координатные оси Y, X и Z блок 69 перемножения V на sin У соединен с блоком 38 вычисления первой производной изменений угла рысканияV и блоком 36 вычисления синуса угла дифферента slnV, з .также через инвертор 70 произведения (VslnV) с сумматором 715 и произведения ), блок 72 перемножения на произведение (cosYsln#) связан с блоком 38 вычисления первой производной изменений угла рысканияф и блоком 55 перемножения sln0 на cosV, и с сумматором 73 произведений Of cosYsfn6) и (Tcos#), который также соединен с блоком 74 перемножения на cos б , связанный с блоком 33 вычисления косинуса угла крена cos в и блоком 34 первой производной изменения угла диффе- рента V, который также соединен с блоком 75 перемножения V на sin Q , связанный с блоком 32 вычисления синуса угла крена sine и через инвертор 76 произведения (У sinQ) с сумматором 77 произведеТО
связан с блоком 39 вычисления второй производной изменения угла рыскания и блоком 55 перемножения slnfl на cos У, а также с сумматором 90 произведений (costf), (y cosrsin6)H(1f (cos6 cosY-V; sinrslni9)), с которым также соединен блок 91 перемножения Т на cos6 , связанный с блоком 35 вычисления второй производной изменений угла дифферентами блоком 33 вычисления косинуса .угла крена cos9, блок 92
Щ1б р нШш«я9 на произведение (cos0 cos Y), теДЙне 51В № 30 вычисления первой
Д гШ|ййзйШЙ Ш й|Щ Й угда кренаби блоком 49 на COSY и сумма15 тором 93 0ebsecosr) и (-YslnУ sin0 |/|сотдрый54ерШ инвертор 94 произведения (YsinYsfn) связан с блоком 95 перемноженияY на произведение (slnYsind), который соединен с блоком 34 вычисления производной изменений угла дифферента и блоком 60 перемноже- нкгя,. на slnY, блок 96 перемноже- нияУ на sln0 связан с блоком 35 вычисления второй производной изменений угла
20
ний (ф cdsYcosQ) и (), который также 25дифферента У и блоком 32 вычисления си- соединен с блоком 78 перемножения V нануса угла крена sln6 , а также через инвер- произведение (cosV cos0), связанный с бло- .тор 97 произведения (Ysin 9) с сумматором ком 38 вычисления первой производной уг-98 иг, который соединен также с блоком 89 ла рысканияY и блоком 49 перемноженияперемножения Р на произведение (cos У sin 0) cose на COST, причем сумматор 77 произве- 30и через инвертор 99 произведения (десозб) дений ()и(-Г81пв)через квадра-с блоком 100 перемножения созб на произтор 79 проекции мгновенной скорости на координатную ось 2 соединен с сумматором ., который также через квадратор 81 проекции мгновенной скорости wx на KO-t 35 ординатную ось X связан с сумматором 716 и произведения (- Vsin V), при этом сумматор 80 ьЈ через квадратор 82 проекции мгновенной скорости со/ на координатную ось Y соединен с сумматором 73 произведений (У cosVsln9) и (YCOS0).
В блоке 23 вычисления проекций углового ускорения W,P, и Wj на координатные оси Y, X и Z блок 83 перемножения на slnfcoe40
ведение $ $. связанного сблоком 33 вычисле ния косинуса угла крена cos б и блоком 101 перемножения наб , который соединен с блоком 34 вычисления первой производной изменений угла дифферента и блоком 30 вычисления первой производной изменений угла крена в , а также через блок 102 перемножения slnd на произведение (W), связанного с блоком 32 вычисления синуса угла крена sine , и инвертор 103 произведения (f0 sin 6) соединен с сумматором 104, приэтом блок 105перемножения sin наcoss соединен с блоком 36 вычисления синуса
динен с блоком 39 второй производной из- 45 угла дифферента sin и блоком 33 вычислеменения угла рыскания и блоком 36 вычисления синуса угла дифферента slnY, a также через инвертор 84 произведения (V sin У ) с сумматором 85со,,, связанный с блоком 31 вычисления второй производной 50 изменений угла крена б1 и инвертором 86 произведения (frcosY), который через блок 87 перемножения cos Т на произведение соединен с блоком 37 вычисления угла диф;ния косинуса угла крена cosd и через блок 106 перемножения на произведение (slnVcosQ), который связан также с блоком 34 вычисления первой производной изменений угла дифферента, соединен с сумматором 107 произведений (6cosV sin0) на (V sin Y cos 6 ), связанный .через блок 108 перемножения на произведение (cosYsln$) с блоком 55 перемножения sine на cosV и
ферента cosT и блоком 88 перемножения 55 блоком 30 первой производной изменений
naV , связанного с блоком 38 вычисления первой производной угла дифферента и блоком 34 вычисления первой производной изменения угла рыскания V1, блок 89 , перемножения на произведение ()
угла крена & , соединенный с блоком 109 перемножения г1 на сумму произведений (У sfn Y cos $ + в cos У sin &), который также связан с блоком 38 вычисления пер-, вой производной изменений угла рыскания
ТО
связан с блоком 39 вычисления второй производной изменения угла рыскания и блоком 55 перемножения slnfl на cos У, а также с сумматором 90 произведений (costf), (y cosrsin6)H(1f (cos6 cosY-V; sinrslni9)), с которым также соединен блок 91 перемножения Т на cos6 , связанный с блоком 35 вычисления второй производной изменений угла дифферентами блоком 33 вычисления косинуса .угла крена cos9, блок 92
Щ1б р нШш«я9 на произведение (cos0 cos Y), теДЙне 51В № 30 вычисления первой
Д гШ|ййзйШЙ Ш й|Щ Й угда кренаби блоком 49 на COSY и сумма15 тором 93 0ebsecosr) и (-YslnУ sin0 |/|сотдрый54ерШ инвертор 94 произведения (YsinYsfn) связан с блоком 95 перемноженияY на произведение (slnYsind), который соединен с блоком 34 вычисления производной изменений угла дифферента и блоком 60 перемноже- нкгя,. на slnY, блок 96 перемноже- нияУ на sln0 связан с блоком 35 вычисления второй производной изменений угла
20
25дифферента У и блоком 32 вычисления си- нуса угла крена sln6 , а также через инвер- .тор 97 произведения (Ysin 9) с сумматором , который соединен также с блоком 89 перемножения Р на произведение (cos У sin 0) 30и через инвертор 99 произведения (десозб) с блоком 100 перемножения созб на произдифферента У и блоком 32 вычисления си- нуса угла крена sln6 , а также через инвер- тор 97 произведения (Ysin 9) с сумматором , который соединен также с блоком 89 перемножения Р на произведение (cos У sin 0) и через инвертор 99 произведения (десозб) с блоком 100 перемножения созб на произ
ведение $ $. связанного сблоком 33 вычисления косинуса угла крена cos б и блоком 101 перемножения наб , который соединен с блоком 34 вычисления первой производной изменений угла дифферента и блоком 30 вычисления первой производной изменений угла крена в , а также через блок 102 перемножения slnd на произведение (W), связанного с блоком 32 вычисления синуса угла крена sine , и инвертор 103 произведения (f0 sin 6) соединен с сумматором 104, приэтом блок 105перемножения sin наcoss соединен с блоком 36 вычисления синуса
угла дифферента sin и блоком 33 вычисле;ния косинуса угла крена cosd и через блок 106 перемножения на произведение (slnVcosQ), который связан также с блоком 34 вычисления первой производной изменений угла дифферента, соединен с сумматором 107 произведений (6cosV sin0) на (V sin Y cos 6 ), связанный .через блок 108 перемножения на произведение (cosYsln$) с блоком 55 перемножения sine на cosV и
блоком 30 первой производной изменений
угла крена & , соединенный с блоком 109 перемножения г1 на сумму произведений (У sfn Y cos $ + в cos У sin &), который также связан с блоком 38 вычисления пер-, вой производной изменений угла рыскания
через инвертор 110 произведения frslnYcos6 + 6 COST sin 6)) и блок111 переножения на сумму (9cos0cosY-rslnYs n6), оединенного с сумматором 93 произведений (9cos0cosY)n(-YslnYsln6) и блоком 38 вычисления первой производной изменений угла рыскания1 , связан с сумматором 90 произведений (Y соз#), fcos Ysin 6) и (f (в cos0 cosY- yslnYsIn 0)).
В блоке 24 вычисления произведений сигналов (Ai, A2 и Аз) блок 112 перемножения х на wx соединен через второй блок усилителей 9 с блоком 12 задания координаты произвольной точки по оси х и с сумматором 71 и произведения (-фз1пТ), блок 113 перемножения У нао связан через второй блок усилителей 9 с блоком 11 задания координаты произвольной точки судна по оси Y и с сумма/горам 73 произведений ( fcosYsinO) и (Ycos$), блок 114 перемножения z на MI. соединен через второй блок усилителей 9 с блоком 13 задания координаты произвольной точки судна по оси z и с сумматором 77 произведений (у cos YcosQ) и (-YsinfJ), а также с сумматором 115 произведений (чХ), (wyY) и (4Z), который связан также с блоком 112 перемножения на , блоком 113 перемножения Y нагоу и соединен с блоком 116 перемножения и определения AI ы, + wz Z), связанным с сумматором 716 и произведения (-Y sinY), причем сумматор 115 произведений (u/X), (toy Y) и (лг Z) соединен также с блоком 117 перемножения и определения (wx X +wyY + w7Z), связанным с сумматором 73 произведений (cosfsinO) H(YCOS#), при этом сумматор 115 произведений (ыхХ), (i-jyY) и (wzZ) соединен с блоком 118 перемножения и определения Аз У/(ц(Х +цУ +w,Z), связанным с сумматором 77 произведений (Р cosYcose) и (-Ysln0).
В блоке 25 вычисления проекций отно- сительного линейного ускорения wy, WA и wz блок 119 перемножения 0на направляющий косинус an соединен с блоком 50 перемножения cosV на cos и через усилитель 15с датчиком 2 ускорений, ориентированных в направлении оси , блок 120 перемножения на направляющий косинус 321 связан с сумматором 62 произведений (sln6 cosr1 sinY) и (-COS0 sin У) и через усилитель 15с датчиком 2 ускорений, ориентированным в направлении оси f , блок 121 перемножения, на направляющий косинус аз1 соединен с сумматором 66 произведений (cos0 cosV sinY) и (sin 0 sin V) и через усилитель 15 с датчиком 2 ускорений, ориентированным в направлении оси Ј , блок 122 перемножения на направляющий косинус ai2 связан с блоком 53 перемножения
sinf на cosV и через усилитель 15с датчиком 1 ускорений, ориентированным в направлении оси ч, блок 123 перемножения «7 на направляющий косинус 322 соединен с
сумматором 64 произведений (sin9 sin sinY) и () и через усилитель 15с датчиком ускорений 1, ориентированным в направлении оси ч , блок 124 перемножения на направляющий косинус аз2 связан с сумма0 тором 68 произведений (cos0 sinf1 sin Y) и (-slnQcosV) и через усилитель 15с датчиком
I ускорений, ориентированным в направлении оси, блок 125 перемножения на направляющий косинус an соединен с
5 инвертором 51 синуса угла дифферента sinY и через усилитель 15 с датчиком ускорений, ориентированным в направлении оси Ј , блок 126 перемножения на направляющий косинус 323 связан с блоком 55 перемиоже0 имя sin 6 на cosY и через усилитель 15 с датчиком 3 ускорений, ориентированным в направлении , блок 127 перемножения на направляющий косинус азз соединен с блоком 49 перемножения созбна cosY и че5 рез усилитель 15 с датчиком 3 ускорений, ориентированным в направлении оси , блок 128 перемножения на Z связан с сумматором 104, через второй блок 9 усилителей с блоком 13 задания координаты
0 произвольной точки судна по оси Y и с сумматором 129 произведений anf0, , 31зЈ0, yZ и Ai, с которым.,также соединены блок 119 перемножения на направляющий косинус an, блок 122 перемножения на на5 правляющий..косинус ai2, блок 125
перемножения на направляющий косинус
813, блок перемножения 116 и определения
Ai wx(uxx+ yY ) и сумматор 130 wx,
который через инвертор 131 произведения
0 (wzY) связан с блоком 132 перемножения на Y, который соединен с сумматором 98&JZ и через второй блок 9 усилителей с блоком
II задания координаты произвольной точки по оси Y, блок 133 перемножения на х связан с сумматором 986j и через второй
5 блок 9 усилителей с блоком 12 задания координаты произвольной точки по оси Х.,3 также с сумматором 134 произведений 321, 322 U,, Э2зЈо, Л и А2, с которым соединены блок 120 перемножения на направляющий
0 косинус 321. блок 123 перемножения Јо на направлякнций косинус 322. блок 126 перемножения на направляющий косинус 323. блок 117 перемножения и определения А2 +«Jj,Z) и с сумматором 135 wy, с
5 которым через инвертор 136 произведения f,Z) связан блок 137 перемножения«,,на Z/ соединенный также с сумматором чв- , рез второй блок 9 усилителей с блоком 13 задания координаты произвольной точки
судна по оси Z, блок 138 перемножения на Y связан с сумматором 85wx и через второй блок 9 усилителей с блоком 11 задания координаты произвольной точки судна по оси Y, и с сумматором 139 произведения аз1, аз270. ass. J/Y и Аз, с которым.также соединены блок 121 перемножения,на направляющий косинус аз1, блок 124 перемножения на направляющий косинус аза, блок 127 перемножения на направляющий косинус, блок 118 перемножения и определения Аз w2(wxX +6-vY ) и с сумматором 140 wz, с которым через инвертор 141 произведения (UyX) связан блок 142 перемножения на X, соединенный с сумматором и через второй блок 9 усилителей с блоком 12 задания координаты произвольной точки судна по оси X, причем сумматор 130 wx через инвертор 143 произведения (XcJ) связан с блоком 144 перемножениял/на X, который связан с сумматором 80ц«и Ц2через второй блок 9 усилителей с блоком 12 задания координаты произвольной точки по оси X, при этом сумматор 135 wy через инвертор 145 произведения (Yw2) связан с блоком 146 перемножениям на Y, который соединен с сумматором 80 wyi через второй блок 9 усилителей с блоком 11 задания координаты произвольной точки по оси Y, причем сумматор 140 w2 через инвертор 147 произ- ведения (Ztj) связан с блоком 148 перемножения we на Z, который соединен с сумматором 80 щ ,ц si о, и через второй блок 9 усилителей с блоком 13 задания координаты произвольной точки по оси Z,
В блоке 26 вычисления проекций мгновенной скорости ujj.p,4 на координатные оси|,|,Ј блок 149 перемножения на sint соединен с блоком 30 вычисления первой производной изменения угла крена0 , блоком 36 вычисления синуса угла дифферента sin и через инвертор 150 произведения (0 sin У ) с сумматором 151ЦЛ-8 г.Т). который также связан с блоком 38 вычисления первой производной изменения угла рыскания V , блок 152 перемножения Y на cos1 соединен с блоком 34 вычисления первой производной изменения угла дифферента Y , блоком 41 вычисления косинуса угла рыскания cosV и сумматором 153 {U(j Ycosf -в sinTcosf), который через инвертор 154 связан с блоком 155 перемножения созт5 на произведение ( Ь siiry ), соединенный с блоком 149 перемножения на sinf и блоком 41 вычисления косинуса угла, рыскания cos4 , блок 156 перемножения б на cos У связан с блоком 30 вычисления первой производной изменения угла крена0, блоком 37 вычисления косинуса угла дифферента cos V и через блок 157 перемножения
произведение (tfcosY ), который также связан с блоком 41 вычисления косинуса угла рыскания cos1/ , с сумматором 158 («o$ 0cosYcos p-fsinf). который также сое динен через инвертор 59 произведения (Tslnf) с блоком 160 перемножения на sinf, связанный также с блоком 34 вычисления первой производной изменений угла дифферента и блоком 40 вычисления синуса угла рыскания sin У.
В блоке 27 вычисления проекций углового ускорения й.о, и ц на координатные оси f,ij, блок 161 дифференцирования ) соединен с сумматором 158 ecosVcosV-fsin }, блок 162 дифференцирования (У|Ј dwy/dt) связан с сумматором 153 (6Jj Ycosf - б sin Y cos V), а блок 163 дифференцирования (u ) соединен с сумматором 151 V-esmVJ.
В блоке 28 вычисления координат , С произвольной точкив системе координат , блок 164 перемножения X на sinY соединен с блоком 36 вычисления синуса угла дифферента sinT и через второй блок 9 усилителей с блоком 12 задания координаты произвольной точки по оси X, а также через инвертор 165 произведения (X sin У) с сумматором 166$, который связан с блоком 167 перемножения Y на произведение (), соединенный с блоком 55 перемножения slnd на cosV и через второй блок 9 усилителей с блоком 11 задания координаты произвольной точки по оси Y, а также с блоком 168 перемножения Z на произведение (созб COST), связанный с блоком 49 перемножения cosd на cosy и через второй блок 9 усилителей с блоком 13 задания координаты произвольной точки по оси Z, причем сумматор 166 соединен также с блоком 47 интегрирования , блок 169 перемножения X на slnf, соединенный с блоком 40 вычисления синуса угла рыскания sin f и через второй блок 9 усилителей с блоком 12 задания координаты
произвольной точки по оси X, а также через блок 170 перемножения cos на произведение ()(slnf), который связан с блоком 37 вычисления косинуса угла дифферента созУ, с сумматором 171/} , который соединен с блоком 45 интегрированиями блоком
172 перемножения у на сумму (созб cosl/ + + sinS sinYsinf), связанным с сумматором
173 произведений (созб cosy) и (slnOsinr sin p) и через второй блок 9 усилителей с блоком 11 задания координаты произвольной точки судна по оси Y, при этом сумматор 173 произведений (cos б cosf ) и (sin 0 sin у sinY) соединен с блоком 54 перемножения cos# ка cosY1 и блоком 63 перемножения произведения (sine slnY) на slnf, причем сумматор
171 через блок перемножения Z на сумму (cos0 sin У slnT - sine cos У), связанного через второй блок 9 усилителей с блоком 13 задания координаты произвольной точки по оси 2, соединен с сумматором 175 произве- дений (-sln6 cosf) и (cos6slnҐ slnY), который связан с инвертором 67 произведений (sine cos) и блоком 58 перемножения произведения (cos-в sin У) на stnY , блок 176 перемножения X на произведение (cosVcost), который соединен с блоком 50 перемножения cosf на cosT. через второй блок 9 усилителей с блоком 12 задания координаты произвольной точки по оси X и с сумматором 177Ј , который соединен с блоком 43 интегрирования, блоком 178 перемножения Y на сумму (sln6 cosy slny- cos@slny), связанным с сумматором 179 произведений (-cos б sin У) и (sinfl cosy5 sin) и через второй блок 9 усилителей с блоком 11 задания ко- ординаты произвольной точки по оси Y, при этом сумматор 179 произведений (-cos#slny) и ( cosVsinf) соединен с инвертором 59 произведения (cos 6 sin У ) и блоком 61 перемножения произведения (slndsInT) на cosy, причем сумматор 177Ј через блок 180 перемножения Z на сумму ( cosVslnY-f slnOsinV), который связан через второй блок 9 усилителей с блоком 13 задания координаты произвольной точки по оси Z, соединен с сумматором 181 произведений (sln# sin У) и (cosflcosr sln r), который связан с блоком 56 перемножения на sin V и блоком 65 перемножения произведения (cos0 cos V) на slnT.
В блоке 29 вычисления проекций абсолютного линейного ускорения wj , w и w;; блок 182 перемножения на соединен с сумматором 177 , блоком дифференцирования ог dw,j/dt и через сумматор 183Ји произведений (to ) на (Ц()). связанный через усилитель 15 с датчиком 2 ускорений, ориентированным в направлении оси , с сумматором 184 w , который соединен через инвертор 185 произведения (й$Ч ) с блоком 186 перемножения «} на iЈ. связанным с блоком 163 дифференцирова- нияЦ; dU{/dt и сумматором 171 .причем сумматор 184 w$ через инвертор 187 произведения («А) соединен с блоком 188 пере- множенияи на , связанным с сумматором 80 &Јuj и и и сумматором 177f , с которым также соединен блок 189 перемножения ц на $, связанный также с сумматором 158 (и ёсо8Усо8У-У81пУ) и через сумматор
190 произведений Ц$), Ц) и (ц) с блоком
191 перемножения на сумму ( который, соединен с сумматором 158 (Ц 0 cosy cosf-Ysiny) и сумматором 183$0 и произведений (w,Ј), (
причем сумматор 190 произведений (ц Ј ), Цу) и (w) связан с блоком 192 перемножения на/, который соединен с сумматором 153 (rV/cos(f - slnYcosy) и сумматором 171, блоком 193 перемноженияцна, который связан с сумматором 151 (u Y-GsinY) сумматором 166$, при этом блок 194 пере- множенияо,насумму( )соединен с сумматором 153 (« Усо8У -в slnTcos) и сумматором 190 произведений (Щ), Цу) и Ц), с которым также связан блок 195 перемножения сумму (), соединенный с сумматором 151 (У -йхтУ причем блок 194 перемножения«гна сумму (+ь через сумИ96 0и произведений (.bJufw + byf ,Ј, }, связанный через усилитель 15 с датчиком 1 ускорений, ориентированный в направлении оси fj, соединен с сумматором 197 w, который связан также через инвертор 198 произведения (ы{$ с блоком 199 перемножения на , соединенный с сумматором 166$ и блоком 161 дифференцирования wf , при этом сумматор 197 w« также через инвертор 200 произведения (w), связан с блоком 201 перемножениям на 1, который соединен с сумматором 171/7 и сумматором 80, wx2 и yf,xЈ причем сумматор и произведений
(.4vH aY tu i) связан с блоком 202 перемножения с на , который соединен с блоком 163 дифференцирования чЦ / г и сумматором 177$ , блок 203 перемножения narj связан с блоком 161 дифференцирования &v dkWdt, сумматором 171, а также сумматором 204 и произведений (й),(с Ј+аМ+со ;Ј) . который соединен с сумматором 205 w и через усилитель 15 с датчиком 3 ускорений, ориентированным в направлении оси t;, при этом сумматор 205 Wj. через инвертор 206 произведения (цЈ) связан с блоком 207 перемножения о, на Ј, который соединен с блоком 162 дифференцирования и сумматором 177« , причем сумматор 205 w также связан через инвертор 208 произведенияцс блоком 209 перемноженияогна S , который соединен с сумматором 804.цдЈ и сумматором 166.
Устройство для определения ускорений произвольной точки судна работает следующим образом. Воздействие ветра и волн приводит к раскачиванию судна. Три взаимно перпендикулярных датчика ускорений 1, 2 и 3 ориентированы в направлении осей Ј,Л и установлены с помощью стойки 4 на стабилизированной платформе 5 относительно корпуса судна 7. С помощью блока гиростабилизации 6 платформы 5 производится ее стабилизация относите ль- но корпуса судна 7 с помощью сигналов, поступающих от гировертикали и гироази. мута, входящих в блок гиростабилизации б. При качке судна датчики ускорений 1, 2 и 3 вырабатывают электрические сигналы, эквивалентные ускорениям|дДили проекциям вектора пространственного ускорения в месте установки датчиков на координатные оси ,ч и $, связанные со стабилизированной платформой 5. Гировертикаль и гиро- азимут блока гиростабилизации 6 жестко установленные относительно корпуса судна 7 вырабатывают электрические сигналы эквивалентные углам крена 9, дифферентами рыскания1/ судна. В блоках задания координат Y, X и Z произвольной точки судна по осям неподвижной системы координат Y, X и Z вырабатывают электрические сигна- л соответствующие значениям координат произвольной точки судна относительно места установки датчиков ускорений 1, 2 и 3 и блока гиростабилизации 6. В блоке 14 задания времени интегрирования ц и его корректировки t2 вырабатываются электрические сигналы эквивалентные времени интегрирования ti и его корректировки t2. Электрические сигналы эквивалентные углам кренаб, дифферента У и рыскания f судна от гировертикали и гироазимута блока гиростабилизации 6 соответственно передаются по электрическим цепям в блок управления платформы 5, от котрого управляющие электрические сигналы поступают по электрическим цепям на механизм разворота платформы 5. Электрические сигналы, эквивалентные углам крена 0 .дифферента У и рыскания1 судна,
координатам Y, X и Z произвольной точки .судна по осям неподвижной системы коор- динат Y, X и Z, времени интегрирования ti и его корректировки t2, ускорениям,передаются по электрическим цепям соответственно в первый блок 8 усилителей, второй блок 9 усилителей, третий блок 10 усилителей и усилитель 15, из которых электрические сигналы передаются в блок вычисления выходных координат 16, в котором осуществляется переработка входной информации в виде электрических сигналов соответствующих измеряемых и задаваемых физических параметров с целью опре- деления электрических сигналов эквивалентных проекциям вектора относительно пространственного ускорения wy, wx и wz на оси неподвижной системы координат Y, X и Z, а также проекциям вектора абсолютного пространственного ускорения w , w,j и w на оси подвижной системы координат ц,Ъ,Ъ, которые по соответствующим электрическим цепям поступают в блок 18 индикации..
Электрические сигналы эквивалентные углам крена , дифферентами рыскания У, времени интегрирования ti и его корректировки tz, ускорениям ДД по соответствую- 5 щим электрическим цепям через первый блок 8 усилителей, третий блок 10 усилителей и усилитель 15 соответственно от гировертикали, гироазимута блока гиростабилизации, блока 14 задания време0 ни интегрирования и и его. корректировки t2, датчиков ускорений 1.2 и 3 передаются в блок 17 вычисления производных и тригонометрических функций. Электрические сигналы, эквивалентные синусу, косинусу угла
5 крена sin В , cos в , синусу, косинусу угла дифферента sin Т, cos Т, синусу, косинусу угла рыскания sinf, cosf по соответствующим электрическим цепям, соединениям в виде линий связи, от блока 17 производных
0 и тригонометрических функций после их получения в нем передаются в блок 21 вычисления направляющих косинусов an, 321, аз1, ai2, Э22, аза, ai3, 323, азз). В блок 22 вычисления квадрата угловой скоростиw и
5 проекций мгновенной скоростии,чи,на координатные оси Y, X и Z из блока 17 вычисления производных и тригонометрических функций по соответствующим электрическим соединениям в виде линий связи пере0 даются электрические сигналы, эквивалентные первой производной изменений синусу, косинусу угла крена в , sln0 , cosQ, первой производной изменений, синусу, косинусу угла дифферента Y, slnY, COST,
5 первой производной изменений угла рыскания т1. В блок 23 вычисления проекций углового ускоренияцч4на координатные оси Y, X и Z из блока 17 вычисления производных и тригонометрических функций передаются
0 электрические сигналы эквивалентные второй, первой производной.дзменений, синусу, косинусу угла крена 0,9, sin в , cos в , второй, первой производной изменений, синусу, косинусу угла дифферентаХгз1п t, cosf,
5 второй, первой производной изменений, угла рысканияr f.B блок вычисления 26 проекций мгновенной скорости судна о.и,ц на координатные оси Јц,; из блока 17 вычисления производных и тригонометрических
0 функций передаются электрические сигналы, эквивалентные первой производной изменений угла крена 0, первой производной изменений, синусу, косинусу угла дифферента, sin Y, cos Y, первой производной
5 изменений, синусу, косинусу угла рыскания т1, sin р, cos V. В блок 28 вычисления . координат,t; произвольной точки судна в системе координат : из блока 17 вычисления производных и тригонометрических функций передаются электрические сигналы, эквивалентные синусу, косинусу угла дифферента slrtT, cosV, синусу угла рыскания sin р, координатам места.в котором ус- тановлено устройство „и с. в системе координат д. В блоке 17 вычисления про- изводиых тригонометрических функций производится преобразование электрических сигналов эквивалентных углам крена, дифферента и рыскания б,, Т. времени интегрирования ti и его корректировки ta, про- екциям в.ектора пространственного ускорения 70% на координатные в электрические сигналы эквивалентные второй, первой производной изменений, синусу, косинусу угла крена в,в, sln0 , cos б , второй, первой производной изменений, синусу, косинусу угла дифферентатД81пТ, cosY, второй, первой производной изменений, синусу, косинусу угла рыскания V. fsinV, cos , координатам места.в котором уста- новлено устройство Дв системе координат и . В блоке вычисления 21 направляющих косинусов (ац, 321, аз1, aia. 322, 332, ai3, 323, азз) производится преобразование электрических сигналов(эквивален- тных синусу, косинусу угла крена sin в, cos6 синусу, косинусу угла дифферента slnY, cosf в электрические сигналы эквивалентные на- правляющим косинусам ац, 321, аз1, ai2, 822, аз2, ai3, 323, азз. произведениям (sin б sinY), (sine cosf slnY), (cos0 cosV), (sin0 sin V), (-sinecosf), (cos9 slnf slnY), (cos0cosVslnY), (),(-cos0sinV),(sln0slnT slnr).
Из блока 21 вычисления направляющих косинусов (а 11, 821, аз1, а 12, 822. аз2, aw. 823, азз) по электрическим соединениям в виде линий связи передаются электрические сигналы в блок 25 вычисления проекций относительного линейного ускорения wy, wx и wz электрические сигналы, эквивалентные на- правляющим косинусам an. 821,831.812,822, аз2, ai3, 823, азз, в блок 22 вычисления квадрата угловой скорости wa и проекций мгновенной скорости ч.ЦЦ на координатные оси Y, X и Z электрические сигналы эквивалент- ные произведениям (sin© cosY ) и (cos6 COSY), в блок 23 вычисления проекций - углового ускорения Ц,/, на координатные оси Y, X и Z электрические сигналы эквивалентные произведениям электрических сиг- налов (cos$ COSY). (sln9 slnY) и (stnOcosf), в блок 28 вычисления координат Ј произвольной точки в системе коорди- натЈ,г{ и Ј электрические сигналы эквивалентные произведениям электриче- ских сигналов (cos 0 cos Y). (cos f cos rO, (cos 0 sin Y). (-cos в sin У), (sin 0C09 Valnf), (sln0 sin Vein Y), (cose cos У), (sin 9 cos Y), (cos0cos f sln y), (sln0slnҐ), (-sin 9 cos f).
В блоке 22 вычисления скорости oj и проекций мгновенной скоростици,.ц на координатные оси Y, X и Z производится преобразование электрических сигналов эквивалентных первым производным углов крена, дифферента и рыскания в/, синусам углов крена и дифферента slnd , sin У, косинусу угла крена cos б , произведениям (costsin б) и (cos Y cos& ) в электрические сигналы,эквивалентные квадрату угловой скорости JSH проекциям мгновенной скорости (JytyQ на координатные оси Y, X и Z. Электрические сигналы(эквивалентные квадрату угловой скорости «/передаются в блок 25 вычисления проекций относительного линейного ускорения wy, Wx и wz и в блок 29 вычисления проекций абсолюного линейного ускорения w , w K WC, а эквивалентные проекциям мгновенной скорости o,w, на координатные оси Y, X и Z передаются в блок 24 вычисления произведений сигналов (Ai, Аг и Аз). В блоке 23 вычисления проекций углового ускорения с, ц, и ц на координатные оси Y, X и Z производится преобразование электрических сигналов эквивалентных вторым, первым производным изменений углов крена, дифферента и рыскания в бД т Дт , синусу, косинусу углов крена и дифферента sin в , созб, slnY, COSY, произведениям (cosYsInQ), (cos б cosY) и (sin Y sin 6 ) вг электрические сигналы эквивалентыепроекциям углового ускорения у„рД на координаты оси Y, X и Z, которые поступают в блок 25 вычисления проекций вектора относительного линейного ускорения wy, wx и wz. В блоке 24 вычисления произведений сигналов (At, A2 и Аз) происходит преобразование электрических сигналов эквивалентных координатам произвольной точки по осям Y, X и Z, проекциям мгновенной скоростиццугна координатные оси Y.XnZ в электрические сигналы эквивалентные сигналам At ых(),Ущ2), А2 йф,Х +WyY Щ2), Аз (Wj,X+( ) и передаются по линиям связи в блок 25 вычисления относительного линейного ускорения Wy, wx и wz, в котором электрические сигналы эквивалентные направляющим косинусам (а 11,821, 831, 312, 822, 832, 813, 823, азз),
сигналам (Ai, А2 и Аз) проекциям ускоре- нийэдДна координатные оси ,qX координатам произвольной точки Y, X и Z в системе координат YXZ, квадрату угловой скорости и проекциям мгновенной скоростиЦЧЧна координатные оси Y, X и Z в электрические сигналы эквивалентные относительным ускорениям wy, wx и wz. которые передаются по линиям связи в блок 18 индикации.
В блоке 26 вычисления проекций мгно- венной скорости у, координатные
оси $, ч иЈ происходит преобразование электрических сигналов эквивалентных первым производным изменений.углов крена, дифферента и рыскания 0Д f , синусу, косинусу угла дифферента sint .cost и синусу, косинусу угла рыскания sin fvcosf в электрические сигналы эквивалентные проекциям мгновенной скорости коор динэтные оси (;,,Ј, которые передаются по линиям связи в блок 29 вычисления проекций вектора абсолютного линейного ускорена блок 27 вычисления
10
НИЯ W,
Wfl И W
проекций углового ускоре«ия« на координатные оси,, в котором электрические сигналы, эквивалентные проекциям мгйсй 15 венной скорости4 ц« на координатные оси Ј( Д преобразуются в электрические сигнал «(Эквивалентные проекциям углового ус- коренияб й на координатные оси,$ и передаются по линиям связи в блок 29 вы- 20 числения проекций абсолютного линейного ускорения w$, w и Wjj. В блоке28 вычисления координатой произвольной точки в системе координат электрические сиг-; налы эквивалентные координатам произвола- 25 ной точки по осям Y, X и Z, координатам места в котором установлено устройство д в сие- ; теме координат, Ј, синусу косинусу угла ; дифферента sin r , cosY, синусу угла pijcka ния sinf и произведениям (slnS cosy ), 30 (eos0 cos У), (sift Q sinҐ sin Y), (-sin 0 cos У), : (cosy cosy), (-cos#slny),(sln$ $ln Vsin-f}, (-sine cosf), (cos У cos-), (-coseslft), ( cos sin 40. {cose cosV slnf), (stafsin), (cos0 sln slnV1) преобразуются в электриче- 35 ские сигналы эквивалентные коордйна- там ,Kj(i; произвольной точки в системе ; координат(,Ј, которые пё|рёдаютЫ по ли- : нийм связи в блок 29 вычисления проекций абсолютного линейного ускорения Нц ,Щ и 40 w , в котором электрические сигналы эквивалентные проекциям ускорения ЈfjЈ коор- динатам Д произвольной точки в системе координат ,2;, проекциям мгновенной скорости на координатные осиД,, 45 проекциям углового ускорения ))}. на координатные ocn.fj.C преобразуются в электрические сигналы;эквивалентные проекциям абсолютного ускорения w , щ и : w j;, которые передаются по линиям связи с 50 блоком 18 индикации,
В блоке 17 вычисления производных и тригонометрических функций электриче- ские сигналы эквивалентные углу кренав по линиям связи поступают в блок 30 вычисле- 55 ния первой производной изменений угла крена Q , в блок 32 вычисления синуса угла крена stn6 , и в блок 33 вычисления косинуса угла крена cos В, в которых соответственно преобразуется в электрические сигналы
.
0
5 0 5 ;
эквивалентные первой производной изменений угла крена в, синусу и косинусу угла крена sin в и cos# . Электрический сигнал эквивалентный первой производной изменений угла крена по линиям связи передаются в блок 22 вычисления квадрата угловой скоростис/и проекций мгновенной скоро- ,цц,на координатные оси Y, X и Z, в блок 23 вычисления проекций углового ускорения координатные оси Y, X и Z, в блок 26 вычисления проекций мгновенной скоро- стиЦь Угна координатные осиЈ,(},Ј,а. также в блок.31 вычисления,второй производной изменений угла крена, в котором преобразуется в электрический сигнал эквивадент- ный второй производной изменений угла кренаО и передается по линиям связи в блок 23 вычисления проекций углового уско- рения)Д4на координатные оси Y, X и Z, в блоке 19 вычисления относительных ускорений wy, wx и wz. Электрический сигнал экви- валентный sln& от блока 32 вычисления синуса угла крена sin & по линиям связи передается в блок 21 вычисления направля- ющих косинусов tail, 821, аз1, ai2,322, азг. ai3, агз, азз), в блок 22 вычисления квадрата угловой скорости б/ и проекций мгновенной Скоростицыуцна координатные оси Y, X и Z, в блок 23 вычисления проекций углового
ускоренияц4ч на ко°РДинатные °си Y , X и Z. Электрический сигнал, эквивалентный созб от блока 33 вычисления косинуса угла крена cos 6 по линиям связи передается в блок 21 вычисления направляющих косинусов (ац, 321, аз1, ai2, агг, аза, ais, 323. азз). в блок22 вычисления квадрата угловой скорости w4 и проекций мгновенной скорости Цах на коордиматйые оси V, X и Z, в блок 23 вычисления проекций углового уско- ренйяцч г на координатные оси Y. X и Z. Электрический сигнал эквивалентный углу дифферента по линиям связи передается в блок 34 вычисления .первой . производной изменений угла дифферента Т, в блоки 36 и 37 вычисления, синуса, косинуса угла дифферента sin Y, cos V, Электрический сигнал эквивалентный первой производной изменений угла дифферента из блока 34 вычисления первой производной изменений угла дифферента по линиям связи передается в блок 22 вычисления квадрата угловой скоро- Стиб/ tf проекций мгновенной скоростиц, на координатные оси Y, X и Z, в блок 23 ., вычисления проекций углового ускорения на координатные оси Y, X и Z, в блок 26 вычисления проекций мгновенной
. скоростиф на координатные осиЈд(Ј в : блоке 20 абсолютных ускорений w, w, и Wj; , а также в блок 35 вычисления второй
производной изменений угла дифферента Т,
271816968 28
в котором преобразуется в электрическийоси С в блок 28 вычисления коорди- сигнал эквивалентный второй производнойнат г; произвольной точки в системе коор- измёнений угла дифферента и по линиямдинат Л и Электрический сигнал связи передается в блок 23 вычисления про-эквивалентный косинусу угла рыскания cos екций углового ускоренияцйДна координат-5 из блока 41 вычисления косинуса угла рыс- ныё оси Y, X и Z, Электрический сигналкания по линиям связи поступает в блок эквивалентный slnt из блока 36 вычислениявычисления 21 направляющих косинусов синуса угла дифферента slnt по линиям сея-(an, az, 831, ai2,822,632, агз, 323, азз), в блок зи передается в блок 21 вычисления направ-26 вычисления проекций мгновенной скоро- ляющих косинусов (aii, 821, aai, ai2,822. аза,10 координатные ,Ј. Электри- ai3, ааз, азз). блок 22 вычисления квадратаческий сигнал, эквивалентный проекции угловой скоростной проекций мгно-ускорения ,, по линии связи передается в венной скоростицчч на координатныеблок 42 интегрирования,, в котором проис- оси Y, X и Z, блок 23 вычисления проекцийходит интегрирование и преобразование углового ускорения ц, на координатные15 электрического сигнала, эквивалентного,, оси Y, X и Z, блок 26 вычисления проекцийв электрический сигнал, эквивалентный мгновенной скороспешна координатныекоторый поступает в блок 43 интегрироеа°- оси Јrj Ј, блок 28 вычисления коорди-ния, в котором производится интегрирова- нат. произвольной точки в системе коор-ние и преобразование, электрического динат,г{ и . Электрический сигнал20 сигнала, эквивалентного, в электрический эквивалентный cost из блока 37 вычислениясигнал, эквивалентный, который передает- косинуса угла дифферента созТ по линиям.ся в блок 28 вычисления координат faЈ про- связи передается а блок 21 вычисления магневольной точки в системе координат Ј,i),4. п рае л я ющих косинусов (ati, 821. 831. an. 832,Электрический сигнал, эквивалентный про- аз2, а 13, ваз, азз). блок 23 вычисления проек-25 екцми ускорения, по линии связи поступа- ций углового ускоренияцццна координат-ет в блок 44 интегрирования, в котором ные оси V. X и Z блок 26 вычисленияпроизводится интегрирование и преобразо- проекций мгновенной скоростиц на коор-ваиие электрического сигнала, эквивалент- дин атные оси,i|,, блок 28 вычисления ко-ного г}0 , в электрический сигнал, ординат, произвольной точки в системе30 эквивалентный, который поступает в блок координат д, . Электрический сигнал экви-45 интегрирования в котором производит- валентный углу рыскания по линиям связися интегрирование и преобразование элек- передается в блок 38 вычисления пер войтрического сигнала, эквивалентного 0, в производной изменений угла рыскания, вэлектрический сигнал, эквивалентный;,, ко- блок 40 вычисления синуса угла рыскания35 торый поступает в блок 28 вычисления коор- sinf и блок 41 вычисления косинуса угладинат и произвольной точки в системе рыскания cosf. Электрический сигнал экви-координат .rj,. Электрический сигнал, эк- валентный производной изменений вивалентный проекции ускорения по ли- угла рыскания по линиям связи передаетсяним связи передается в блок 46 в блок 22 вычисления квадрата угловой ско-40 интегрирования Ј , в котором происходит РОСТИ&/И проекций мгновенной скоро-интегрирование и преобразование, электри- сти (j(j на координатные оси Y, X и Z, в блокческого сигнала, эквивалентного Ј, в элект- 23 вычисления проекций углового ускоре-рический сигнал, эквивалентный, который нияшДна координатные оси Y,X и Z, в блокпоступает в блок 47 интегрирования 5„, в 26 вычисления проекций мгновенной скоро-45 котором производится интегрирование и стицш на координатные осиfy,, а также впреобразование, электрического сигнала, блок 39 вычисления второй производной из-эквивалентного,,, в электрический сигнал, менений угла рыскания т, где преобразует-эквивалентный, который передается в блок ся в электрический сигнал эквивалентный28 вычисления координат /произвольной вторрй производной изменений угла рыска-50 точки в системе координатЈ17,5. Блоки 42- ния и по линии связи передается в блок 2347 интегрирования „.Д получают вычисления проекций углового ускоре-по линиям связи электрические сигналы, эк- координатные оси Y, ХиГ. Элек-вивалентные времени интегрирования ц и его трический сигнал эквивалентный синусукорректировки интегрирования t2 от блока угла рыскания slnf из блока 40 вычисления55 14 задания времени интегрирования tin его , синуса угла рыскания slnf передается покорректировки t2 через третий блок Юуси- линиям связи в блок 21 вычисления направ-лителей. Блок 48 синхронизации вырабаты- ляющих косинусов (an, 821,831,812,822,832,веет управляющий электрический сигнал, 313, 823, азз), в блок 26 вычисления проекцийкоторый передается по линиям связи в блоки мгновенной скорости ц.на координатные42-47 интегрирования, 4..,,«fc,,,..,Ј.. .
291816968 30
В блоке 21 вычисления косинусов (an,эквивалентный произведению (sinO sin Ч) 821, аз, 312, 322, эз2, 313, 323, эзз) электриче-электрические сигналы эквивалентный sine ские сигналы, эквивэлентный cos0 из бло-из блока 32 вычисления синуса угла крена и ка 33 вычисления косинуса угла кренээквивалентный созв из блока 41 вычисле- cos0 и эквивалентный cosf из блока 37 вы- 5ния косинуса угла рыскания поступают в числения косинуса угла дифферента cost поблок 57 перемножения sin 0 на cos У , в линиям связи поступают в блок 49 перемно-котором они преобразуются в электриче- жения cosQ на COST, в котором они преоб-ский сигнал эквивалентный произведению разуются в электрический сигнал,(sinб cosY), электрические сигналы эквива- эквивалентный произведению (cose cosY), 10лентный slnYns блока 36 вычисления синуса электрические сигналы, эквивалентныйугла дифферента и эквивалентный произве- cosV из блока 37 вычисления косинуса угладению (cos9 slnH) из блока 52 перемноже- дифферента cosT и эквивалентный cosV изния cosf) на sinf передаются по линиям связи блока 41 вычисления косинуса угла рыска-в блок 58 перемножения произведения ния COST передаются в блок 50 перемноже- 45(cosdslnf) на sin Т, в котором они преобра- ния cosy на cosY , в котором онизуются в электрический сигнал (cosdsinVsin r), преобразуются в электрический сигнал, эк-электрический сигнал () поступают вивалентный произведению (cos У cosY),в инвертор 59 произведения (cos© sin У), в электрический сигнал, эквивалентный slnTкотором преобразуется в электрический сиг- из блока 36 вычисления синуса угла диффе- 20нал (-cos б sinV), сигналы sinY из блока 36 рента sinY поступает в инвертор 51 синусавычисления синуса угла дифферента и sind угла дифферента sin , в котором преобра-из блока 32 вычисления синуса угла крена зуется в электрический сигнал, эквивалентныйпередаются в блок 60 перемножения (-sinY), электрические сигналы, эквивалент-sinY, где преобразуются в сигнал (slnSsinY) ный cos0 из блока 33 вычисления косинуса 25и передается в блок 61 перемножения угла дифферента cosQ и эквивалентные sinfпроизведения (sin6slnY) на cosf, в кото- из блока 40 вычисления синуса угла рыска-рый также поступает сигнал cosf из блока ния slnf передаются в блок 52 перемноже-41 вычисления косинуса угла рыскания. В ния cos# на slnf , p котором ониблоке 61 перемножения произведения преобразуются в электрический сигнал, эк- 30(sln$slnY) на cos входные сигналы преоб- вивалентный произведению (cos в slnf ), разуются в сигнал (sln cosfsinY), который электрические сигналы, эквивалентный slnfпередается в сумматор 62 произведений из блока 40 вычисления синуса угла рыска-(sln0 cos V sin Y) и (-cos0 slnf), получающий ния slnf и эквивалентные cosf из блока 41на вход также сигнал (-созб sin Y) из инвер- вычисления косинуса угла рыскания посту- 35тора 59. Сигнал (sinf) из блока 40 вычисле- пают по линиям связи в блок 53 перемноже-ния синуса угла рыскания и сигнал ( sinY) .ния на cos f, в котором происходит ихиз блока 60 поступают на вход блока 63. преобразование в электрический сигнал, эк-перемножения произведения (sin б slnY) вивалентный произведению (sin V cosf),на sinf, вырабатываемый в котором сигнал электрические сигналы, эквивалентный 40(sin 9 sinV sinY) передается в сумматор 64 COS0 из блока 33 вычисления угла крена cos произведений (sln6 slnf slnY) и (cosS cosV), и эквивалентный cosf из блока 41 вычисле-на вход которого поступает также сигнал ния косинуса угла рыскания cosf передают-(cose cosf) из сумматора 54. Сигнал sinY из ся в блок 54 перемножения cos9 на cosf, вблока 36 и сигнал (cos 0 cos f) из блока 54 котором они преобразуются в электриче- 45поступает в блок 65 перемножения про- ский сигнал, эквивалентный произведе-изведения (cosd cosV) на sinY, вырабаты- нию (cos 9 cosf), электрические сигналываемый в котором сигнал (cosв cosV slnV) эквивалентный sine из блока 32 вычисленияпередается в сумматор 66 произведений синуса угла крена и эквивалентный cost из(созб cosfcosf) и (sin0 slnV), на вход кото- блока 37 вычисления косинуса угла диффе- 50рого поступает также сигнал (sinOsinУ) из рента поступают в блок 55 перемноженияблока 56. Сигнал (sin б cos f) из блока 57 sin# на cosT, в котором они преобразуютсяпередается в инвертор 67 произведения в электрический сигнал эквивалентный про- (sln# cos V), в котором преобразуется в сиг- изведению (sfn0 cosY), электрический сиг-нал (-sln6 cos V), передаваемый в сумма- нал эквивалентный sln0 из блока 32 55тор 68 произведений (cos6 sin V sinY) и вычисления синуса угла крена и эквивален-(-sln0 cos У), на вход которого также посту- тный sin из блока 40 вычисления синусапает сигнал (cos6 sinVsInf) из блока 58. угла рыскания передаются в блок 56 пере-В блоке 22 вычисления квадрата угло- множения slnO на stnf , в котором они пре-вой скоростииаи проекций мгновенной ско- образуются в электрический сигнал .ростио у, на входы блока 69
перемножения на slnY поступают сигналыТ из блока 38 и slnT из блока 36, в котором вырабатывается сигнал (f sin V) передаваемый в инвертор 70 произведения (VsinY), выработанный в котором сигнал (-Ysin Y ) поступает на вход сумматора 71 в и произведения (-fy sin Y), на, второй вход которого передается сигнал 9 из блока 30. Сигналы из блока 38 и (cos slnd) из блока 55 поступают на блок 72 перемножения на произве- дение (cpsVsin©), выработанный в котором сигнал (f cosYsinQ) передается в сумматор 73 произведений (pcosYsin$) и (YCOS&), на вход которого поступает также сигнал (Ycos в) из блока 74 перемножения 1/ на cos б , на входы которого передаются сигналыY из блока 34 и созбиз блока 33. В блок 75 пере- множенияТ на sln9 поступают сигналы и sln6 из блоков 34 и 32 соответственно. Вырабатываемый в блоке 75 сигнал (Т sin 9) передается в инвертор 76 произведения (Ysin6), преобразуемый в сигнал (-YsInQ) и поступающий в сумматор 77 произведений (fcosYcosQ) и (-Ysln#) на вход которого также передается сигнал (Y cos Y cos б) из блока 78 перемножения на произведение (cos Y cos 0), на входы которого поступают сигналы1 и (cosT cos 6) из блоков 38 и 49 соответственно. Выработанный в сумматоре 77 сигнал (VcosYcosfl-YsInQ) передается в квадратор 79 проекций мгновенной скорости«,, преобразуемый в сигналь и поступающий на вход сумматора w,,и (, на входы которого передаются сигналыц ц из квадраторов 81 и 82 соответственно, причем на вход квадратора 81 поступает сигналу из сумматора 71, а на вход квадратора 82 сигналу,, из сумматора 73. Сигналыиуу,идиз сумматоров 73, 71, и 77 передаются на входы блока 24 произведений (At, A2 и Аз, а сигнал ( w|) на входы блоков 25 и 29.
В блоке 23 вычисления проекций углового ускорения и,цпгна входы блока 83 перемножения1)1 на slnY поступают сигналы и sin У из блоков 39 и 36 соответственно, в котором вырабатывается сигнал (Y sinY) и передается в инвертор 84 произведения (V sin Y) из которого преобразованный сигнал (-V slnY) поступает в сумматор ..на входы которого передаются сигналыО и (-tttost) из блока 31 инвертора 86 произве- дения (fVcosY) соответственно. Сигналы иУ соответственно, из блоков 34 и 38 поступают в блок 88 перемножения т1 на Y, из которого сигнал .(Н) передается в блок 87 перемножения на произведениетТ, на вто- рой вход которого поступает также сигнал cosT из блока 37. Вырабатываемый в блоке 87 сигнал (VYcos у) передается на вход инвертора 86. Сигналы (созУ81п0)иТ соответственно, из блоков 55 и 39 поступают в блок 89 перемножения V5 на произведение (cosYsin0), в котором вырабатывается сигнал (т1 cosT sin б) и передается на входы сумматора 90 произведений (У cos# ), (VcosT sin 6) и (Vfflcos 0 cosT-Ysln-Ysin в) и сумматора 98ц,. СигналыТ и cosflсоответственно из блоков 35 и 33 поступают в блок 91 перемножения на cos0, в котором вырабатывается сигнал (Y cqs0) и передается в сумматор 90. Сигналыё и (cos6 cosY) соответственно из блоков 3Q и 49 поступают в блок 92 перемножения в на произведение (cos6 cosY), в котором преобразуются в сигнал ($cos0 cosY),n передается в сумматор 93 произведений (б cos0 cost) и (-YsinYsind), на вход которого также поступает сигнал (-YsinYsfn9)H3 инвертора 94 произведения (f sinTsinS), получающий сигнал (YsinTsine) из блока 95 перемноженияТ на произведение (sinYsin6), на входы которых поступают сигналы Y и (slnY sin Q ) соответственно из блоков 34 и 60. СигналыТ и slnQ соответственно из блоков 35 и 32, в котором преобразуется в сигнал (У sin 6 ) и передается в сумматор , на вход которого также поступает сигнал () из инвертора 99 произведения (Убсозб ), на вход которого передается сигнал изДлока 100, получающего сигналы cos6 и Несоответствен но из блоков 33 и 101, на входы которого поступают сигналы Y и соответственно из блоков 34 и 30. Сигнал ТО из блока 101 перемножения на б поступает в блок 102 перемноже- ния sln0 на произведение (slnY cos6 ), получающего также сигнал stnS из блока 32, Сигнал (v-QsinQ) из блока 12.поступает в инвертор 103 произведения (-fdsInQ), преобразуемый в сигнал (-Wslnfl ) и передаваемый в сумматор 104оу, на вход которого также поступает сигнал из сумматора 90, Сигналы sin и cos0 соответственно из блоков 36 и 33 поступают в блок 105 перемножения slnf на cose , преобразуемые в сигнал (sinTcos0)n передаваемый в блок 106 перемноженияТ на произведение (sinf costf), на вход которого также поступает сигнал из блока 34. Сигнал (Г slnY cos 6) из блока 106 поступает в сумматор 107 произведений ( cos Y sin e ) на (Г sin Y cos б ), на вход которого передается также сигнал (6cos sin б ) из блока 108 перемножения б на произведение (slnYcos0), на вход которого поступают сигналы и со8У(81пвсрответственно из блоков 30 и 55. Сигнал (f sirrTcos9 +6cosTs f 6) из сумматора 107 поступает в блок 109 на вход которого передается также сигнал из блока 38. Сигнал из блока 109 через инвертор 110 произведения (r4YslnYcos6 +0 cos Т sin 6)) поступает р
331816968 34
сумматор 98. Сигналы и(0cos6cosY-rslnTsln6)второй блок 9 усилителей и сумматора 98. соответственно из блока 38 и сумматора 93Сигналы X и и, соответственно из блока 12 поступают в блок 111. преобразованный вчерез второй блок 9 усилителей и сумматор котором сигнал передается в сумматор 90.98 поступают в блок 133 перемножения СигналыцаД соответственно из сумматоров 5 на У, преобразуются в сигнал ({jt$, переда- 104, 85 и 98 поступают в блок 25.ваемый в сумматор 134 произведений a21fd, I В блоке 24 вычисления произведенийай. и А, на входы которого nocYy- сигналов (Ai, А2, Аз) сигналы Х,и еоответст-па ют также сигналы (aai ). (а22), (аазС,). венно из блока 12 через второй блок 9 уси-А соответственно из блоков 120, 123, 126 и лителей и сумматора 71 поступают в блок 10 117. Сигнал преобразованный 112 перемножения X на«„ преобразованныев сумматоре 134 поступает в сумматор в котором в сигнал (), передаваемый в135 wy. на вход которого поступает также . сумматор 115 произведений ЈvX), (цУ) и 2).сигнал ( инвертора 136 произведения Сигналы Y,«jy соответственно из блока 11(jx Z) на вход которого передается сигнал через второй блок 9 усилителей и сумматора 15 (u,Z) из блока 137 перемножения ujyна 2, 73 поступают в блок 113 перемножения V не иуполучаемого сигналы 7,ц,соответственно из преобразованные в котором в сигнал (WyY), блока 13 через второй блок 9 усилителей и передаваемый в сумматор 115, на вход ко-сумматора 85. Сигналы YA соответственно торого также поступает сигнал )из блокаиз блока 11 через второй блок 9 усилителей 114 перемножения Z на ц,, в который пере- 20 и сумматора 85 поступают в блок 138 передаются сигналы Z,uz соответственно из бло-множения «3, на Y, преобразуются в сигнал ка 13 через второй блок 9 усилителей и(цУ), передаваемый в сумматор 139 произве- сумматора 77. Сигнал ( + t«)yY ) издений aai, аз27., аззЈв.бЛ Y и Аз. на входы сумматора 115 поступают на входы блоковкоторого поступают также сигналы (азнД 116,117 и 118, на входы которых соответст- 25{азод). (азз4)и АЗ соответственно из блоков венно поступают сигналы х из сумматора121, 124. 127 и 118. Сигнал преобразован- 71,циз сумматора 73 сумматора 77.ный в сумматоре 139 поступает в сумматор Сигналы (Ai w(k xX+bJyY+ Z), А2а 140 wz, на вход которого поступает также (to/X+tJyY+q.Z), AV X+WyY-wiZ) соот-сигнал fcj$ из инвертора 141 произведения ветственно из блоков 116, 117 и 118 посту- 30&Х) на вход которого передается сигнал («-Vе) пают в блок 25.из блока 142 перемноженияе на X. получаеВ блоке 25 вычисления проекций отно-мого сигналы X ицсоответственно из блока - сительногр линейного ускорения Wy, Wx и WH12 через второй блох 9 усилителей и сумма- сигналы (an cosҐcosY), (a2i sln0cosPsUvt -тора 104. Сигналы X и и соответственно из -cosflstnf), ( cos /slnY-sineslr y), 35блока 12 через второй блок 9 усилителей и (ai2 stnTcos f},(a22 sfn0slntfslnY+cos6cosf),сумматора 8JD поступают в блок 144 пере- (а32 sln д cosY), (313 -sin Y), ( в cosy).множения и на X, преобразуются в сигнал ( в cosY) соответственно из блоков(Хи), передаваемый в инвертор 143 проиэ- 50, 62, 66, 53, 64,68,51,55, 49 поступают введения P(J), сигнал из которого поступает блоки 119, 120, 121, 122, 123, 124,125,126. 40в сумматор 130. Сигналы Х ь/соответствен- 127, причем на входы блоков 119,120 и 121но из блока 11 через второй блок 9 усилите- поступает сигнал Ј, из датчика 2 через блоклей и сумматора 80 поступают в блок 146 15, блок 122,123 и 124 сигнал (,из датчика 1,перемножения w на Y, преобразуются в сиг- через блок 15 и блоков 125,126,127 сигнал Hafl(Yj), передаваемый в инвертор 145 про- из датчика 3 через усилитель 15. Сигналы 45изведения (YtJ), сигнал из которого Z ицсоответственно из блока 13 через вто-поступает в сумматор 135. Сигналы Z рой блок 9 усилителей и сумматор 104ы,по-несоответственно из блока 13 через второй ступают в блок 128 перемножения ц. на Z,блок 9 усилителей и сумматора 80 поступз- преобразуются в сигнал (ц,2) и передаетсяют в блок 148 перемножения«Лш Z, преоб- в сумматор 129 произведений (an),(ai2«ji), 50разуются в сигнал (Zt/), передаваемый в (ai3), (uvZ) и Ai,tHa входы которого поступа-инвертор 147 произведения (), сигнал из ют сигналы (ацЈв), (ai2,). (aia) и Ai соответ-которого поступает в сумматор 140. Сигна- ственно из блоков 119, 122, 125 и 116. лы wy, wx и wz соответственно из сумматоров Сигнал преобразованный в сумматоре 129135,130 и 140 поступают в блок 18 индика- поступает в сумматор 130 wx, на вход кото- 55ции.
рого поступает также сигнал (-&JtY)из инвер-В блоке 26 вычисления проекций мгнотора 131 произведения ( ozY) на вход. венной скоростицЦ сигналыв и slny сооткоторого передается сигнал (oJzY) из блокаветственно из блоков 30 и 36 поступают Ё
132 перемноженияе на Y, получаемого сиг-блок 149 перемножения на slnf, преобраналы Y.WJ. соответственно из блока 11 черезэуется в сигнал (0 sin Т), который поступает
351816968 36
в инвертор 150 произведения (в sin У) и (slnPcosY) соответственно из блока 11 через преобразуется в сигнал (), передается второй блок 9 усилителей и блока 55. На в сумматор 151 (()%- y-esinY} , на вход входы блока 168,поступают сигналы Z и которого поступает также из блока 38. Сиг- (cos# cosT) соответственно из блока 13 че- Hanbifncosf соответственнр из блоков 34 и 5 раз второй блок 9 усилителей и блока 49, 41 поступают в блок 152 Y на cos Ґ , в Сигналы X и sin V. соответственно из блока котором преобразуются в сигнал (У cos V), 12 через второй блок 9 усилителей и блока передаваемый в сумматор 153 (w Vcosy-- 40 поступают в блок 169 перемножения X
-0slnY cos У),-на вход которого также на slnf и преобразуются в сигнал (X slnY1), поступает сигнал (-eslnYcosV) из йнвер- 10 который передается в блок 170 перемноже- тора 154 произведения (|sinV cos У), пол- йиясозу на произведение (X slnV), на вход учающего сигнал (slnfeosyjHa блока 155 которого поступает также сигнал cos У из перемножения cosy на произведение блока 37, а на выходе вырабатываются сйг- (0 sin Т), на входы которого поступают сиг- нал (X sinY cosY) передаваемый в сумматор налы (& slnY) и cosV соответственно из бло- 15 171 ц, на входы которого также поступают сиг- ков 149 и 41. Сигналы 0 и cosy Налы, Х(со$в cosV+ sln#slflYsHVy) и соответствен но из блокрвЗО. и 37 поступают Z(cos6 s|nYslnY- созУ) соответственно на блок 156 перемножения на 90sY, в ко- из блоков 45,172 и 174. На входы блока 172 тором преобразуются в сигнал (dcosY), ко- перемножения Y на сумму (cos0 cosf+ торый передается в блок. 157 перемножения 20 -f sin б sinV sin У) поступают сиг- cosr1 на произведение (0 cosY), на вход ко- налы V и (со80 СО8т + slhfl sin VsinT) торрго подается также сигнал cosY из блока соответственно из блока 11 через второй 41, а на выходе вырабатывается сигнал блок 9 усилителей и сумматора 173 произве- (ecosTcosf) передаваемый в сумматор 158 дений(сй80со8У)и(8|п08)лУ8(п), на входы ( $cos Т cosУ - т sinV)% на вход которого 25 которого передаются сигналы (cos & cos У) и также подается сигнал (-YslnyjMs йнверто- (sirr0 sinVsln V } соответственно из блоков 54 ра 159 произведения (Т slnV), который прл- и 63. На входы блока 174 перемножения Z учает сигнал (YsfnY ) из блока 160 на сумму (созб sin4 sinY-slne cos1/) посту-. перемноженияТна slnY.Ha входы которого .ftaraTCHrHaflHZHfcoseslniVsfjrV-sinScosf) поступают сигналы и sfnf соответственно 30 из блока 13 через второй блок 9 усилителей из блоков 34 и 40. Сигналы|w f-.$ tin Vjf, и сумматора 175 произведений (-s n9cosY)и (.sV-6 5/r}Tccsf7 и cosrcosv- slnV) (cos0sfnVsin r),Ha входы которого переда- соответственно из сумматоров 151 153 и ются сигналы ()и(cos0slnVsfnT) 158 передаются в блок 27 в.ычисления про- соответственно из инвертора 67 и блока 58, екций углового ускорения и блок 29 35 Сигналы X и (cos т1 cos r ) соответственно из вычисления проекций вектора абсолютного блока 12 через второй блок 9 усилителей и линейного ускорения WT, w, и щ. ,блока 50 поступают в блок 176 перемножеВ блоке 27 вычисления проекций угло4- -нйяХ на произведение (cost1 cost), выходного ускорения ццц, сигналы 4Ц соответ- ной сигнал которого (X cosf cos T ) ственно из блоков 158,153 и 151 поступают 40 передается в сумматор 177 , на входы кона входы блоков 161, 162 и 163 дифферен- торого также поступают сигналы, UHpOBaHHfl()H «oH/dt), (Y (sfrr 0 cos Ч slnY - созб slrtf }) и в которых преобразуются в сигнал , Z(cos$ cos Vslnf+sln0s}n f) соответственно передаваемые в блок 29 вычисления яроек- из блоков 178 и 180. На входы блока 178 ций абсолютного линейного ускорения w , 45 перемножения Уна сумму (sln0 cos yslrvt- w, HW .;.- :.- cos0 sinV) поступают сигналы Y и
В блоке 28 вычисления коорди- (sinecosYsln V-cos©sinf)соответственно
- . произвольной точки в системе ко- из блока 11 через второй блок 9 усилителей ординат , и сигналы X и и сумматора 179 произведений (-cos© sin f) sinY соответственно из блока 12 через вто- 50 и (sln0 cosfsln), на входы которого посту- рой блок 9 усилителей и блока 36 поступают пают сигналы () и (sinScosV sinY) в блок 164 перемножения X на SlnY , и пре- соответственно от инвертора 59 и блока 61. образуются в сигнал (X sinY), который пере- На входы блока 180 перемножения Z на сум- дается в инвертор 165 произведения (X slrW), му (cos 6 cos V slnY + slnV) поступают на выходе которого вырабатывается сигнал 55 сигналы и (cos6 cos slnY + sin 0 slnf) (-X sinY), передаваемый в сумматор , соответственно от блока 13 через второй на входы которого также поступают сиг- блок 9 усилителей и сумматора 181 произ- налыЈ„, (Y sin0 cosY) и (Z cos0 cosY) ведений (sine sinV) и (cos6cosV slnY), на соответственно из блоков 47,167 и 168. На вход которых передаются сигналы входы блока 167 поступают сигналы (cps0cosyslnY) и (slnSstnV) соответственнр
371816968 38
из блоков 65 и 56. Выходные сигна-от датчика 3 через усилитель 15 и блока 195, лы |дЈ соответственно от сумматоров 177,на входы которого передаются сигналышл 171 и 166 поступают в блок 29 вычисления(6J + cJnrj + и t, ) от сумматоров 151 проекций абсолютного линейного, ускоре-и 190, а выходной сигнал 204 от сумматора ния Wt , w,j и Wz; , в котором сигна-5 204 поступает в сумматор 205, на входы лы$. соответственно от сумматора 177 икоторого передаются сигналы (-со ) и (-wf) блока 162 поступают в блок 182 перемноже-от инверторов 206 и 208, в которые поступа- нияйЛ} на и преобразуются в сигнал,Ц),ют сигналы от блоков 207 и 209. На входы который передается в сумматор 183 „ иблока 207 поступают сигналы и oJq от произведений ), Ц( Щ ЧО). на входы10 сумматора 177 и блока 162i На входы блока 209 которых также поступают сигналы, ипоступают сигналы Ј и и от сумматоров 166 (jf(w +Wr,ri + Wj; К, )) соответственно оти80. Сигналы w , w и w от сумматоров датчика 2 через усилитель 15 и блок 191184,197, 205 передаются в блок 18 индикации, перемножениям на сумму ((;$+ jl+ QИспользование устройства для опреде- преобразуемые в сигнал () 15 ления ускорений произвольной точки судна который передается в сумматор 184 w. ,позволит получить достоверную информа- совместно с сигналами соответст-цию об ускорениях (относительных и абсо- венно от инверторов 185 и 187 на входылютных) при качке судна в условиях которых поступают сигналы ( соот-эксплуатационного рейса с учетом типа суд- ветственно от блоков 186 и 188. На входы20 на. Контроль ускорений (относительных и блока 186 перемножения наq поступаютабсолютных) при качке судна позволитобес- сигналыц-,} соответственно от блока 162 ипечить безопасность труда и повысить охра- сумматора 177Ј . На входы блока 188 пере-ну здоровья членов экипажа судов, множенияи на поступают сигналы и,Ј со-работающих в условиях шторма, а также ответственно от сумматоров 80 и 177.25 повысить производительность труда, за Си гн ал ьш{ соответствен но от сумматоровсчет стабилизации луча гидролокатора и 158 и 177 поступают в блок 189, и преобра-корректировки морских электронных весов, зуются в сигнал (Ј). который передается в. Формулаизобретения сумматор 190 произведений fat), (щ) и ЈЈЈ),Устройство для определения ускорений на входы которого также передаются сиг-30 произвольной точки судна, содержащее ста- налы (ц7) и (Ч;О соответственно от блоков билизйрованную платформу, установлен- 192 и 193, а выходной сигнал Ц()ную на корпусе судна, блок взаимно поступает в блок 191. На входы блока 192перпендикулярно расположенных датчиков перемножения w на ц поступают сигналыь ускорения, состоящий из первого и второго и у от сумматоров 153 и 171. На входы35 датчиков ускорений и установленный на блока 193 перемножения ц, Ј передаютсястабилизированной платформе, блок гиро- сигналыйл-иС от сумматоров 151 и 166.стабилизации платформы, установленный Сигналы ЦЈ+СА, +wcЈ) и (jjf от сумматоровна стабилизированной платформе и под- 190 и 153 поступают в блок 194 перемноже-ключенный управляющим выходом к меха- сумму () и преобразуются40 низму разворота стабилизированной в сигналс йу) ), который передаетсяплатформы, первый и второй блоки усилите- в сумматор 19бЈ и произведений ( С )лей, блок вычисления выходных координат, (&(ь + L ), на входы которого такжепричем информационный выход блока гиро- поступает сигнал )„ и (jfiЈ от датчика 1стабилизации платформы подключен ко через усилитель 15 и блока 202 перемноженияц.45 входу первого блока усилителей, о т л и ч а- наЈ, на входы которого поступают такжею ще е с я тем, что, с целью повышения сигналы и от сумматора 177 и блока 163,точности, введены блок индикации, задат- а выходной сигнал fo+iA oj + со,- Ј ))чик пространственных координат, задатчик передается в сумматор 197 vi , на входывремени интегрирования и его корректи- которого поступают также сигналы (-w) и50 ровки, третий блок усилителей, усилитель, а (Wfj) от инвертора 198 и 200, получающихв состав блока взаимно перпендикулярно сигналы () и () от блоков 199 и 201. Нарасположенных датчиков ускорений введен входы блока 199 поступают сигналы третий датчик ускорений, взаимно перпен- сумматора 166 и блока 161. На входы блокадикулярно расположенный к первому и втб- 200 поступают сигналы и «/от сумматора55 рому датчикам ускорений блока, выходы 171 и квадратора 2. Сигналыь и ч от блоказадатчика пространственных координат, за- 161 и сумматора 171 поступают в блок 203 идатчика времени интегрирования и его кор- преобразуются в сигнал Јiif), который пере-ректировки, блока взаимно дается в сумматор 204, на. входы которогоперпендикулярно расположенных датчиков также поступают сигналы .)ускорений подключены соответственно к .
входам второго блока усилителей, усилителя, третьего блока усилителей, выходы первого и второго блоков усилителей, усилителя, третьего блока усилителей подключены соответственно к первому - четвертому входам блока вычисления выходных координат, первый и второй выходы которого подключены соответственно к первому и второму входам блока индикации, причем в состав блока вычисления выходных координат входят блок вычисления производных и тригонометрических функций, первый, второй и третий входы которого являются соответственно первым, третьим и четвертым входами блока, последовательно соединенные блок вычисления направляющих косинусов, блок вычисления квадрата угловой скорости, блок вычисления произведений, блок вычисления проекций относительного линейного ускорения, выход которого является первым выходом блока, второй вход - вторым входом блока и подключен к второму входу блока вычисления произведений, третий вход подключен к четвертому входу блока, последовательно соединенные блок вычисления проекций мгновенной скорости, блок дифференциаторов, блок вычисления проекций абсолютного линейного ускорения, выход которого является вторым выходом блока, второй вход подключен к четвертому
входу блока, а также блок вычисления проекций углового ускорения , блок пересчета координат произвольной точки, выход которого подключен к третьему входу блока вы- числения проекций абсолютного линейного ускорения, первый вход - к второму входу блока, второй вход - к первому выходу блока вычисления произвольных и тригонометрических функций, второй, третий и четвертый выходы которого подключены соответственно к входу блока вычисления проекций мгновенной скорости, к первому входу блока вычисления проекций углового ускорения и к второму входу блока вычисления квадрата угловой скорости, пятый и шестой выходы - к первому и второму входам блока вычисления направляющих косинусов, второй выход которого подключен к второму входу блока вычисления проекций углового уско- рения, третий выход - к четвертому входу блока вычисления Проекций относительного линейного ускорения, пятый и шестой входы которого подключены соответственно к выходу блока вычисления проекции углового ускорения и к второму выходу блока вычисления квадрата угловой скорости, который подключен также к четвертому входу блока вычисления проекций абсолютного линей-: ного ускорения, пятый сход которого под- ключей к второму выходу блоха вычисления проекций мгновенной скорости.
Фиг. 2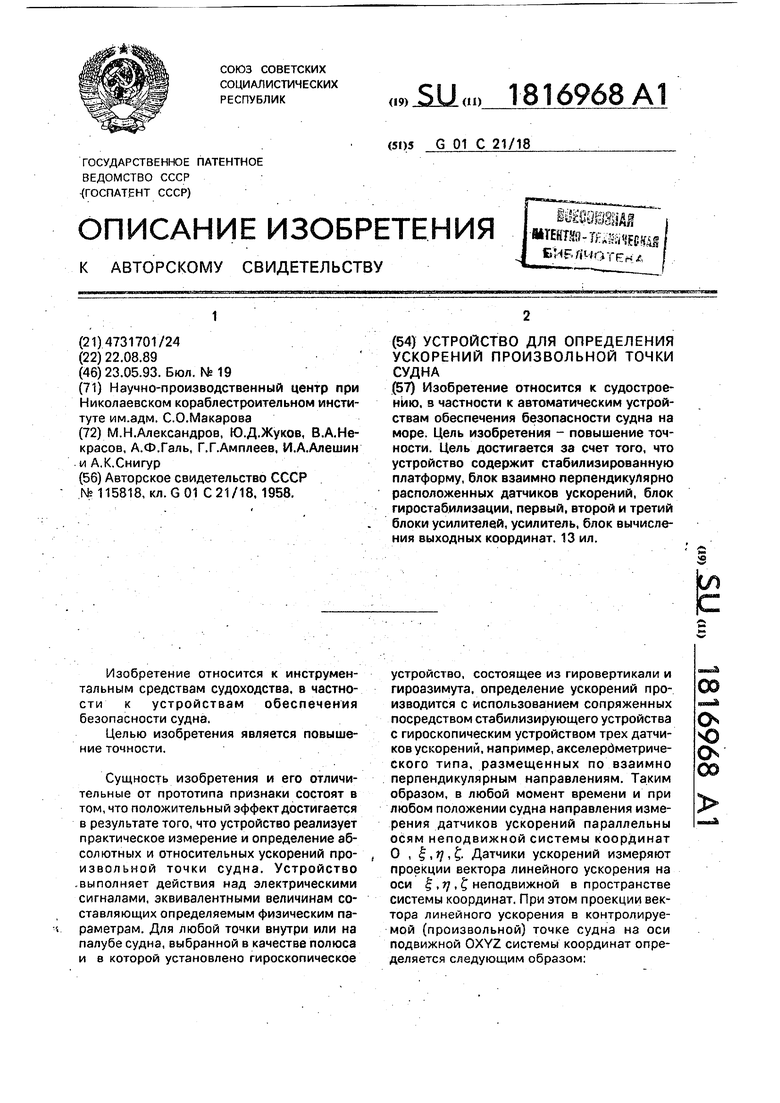

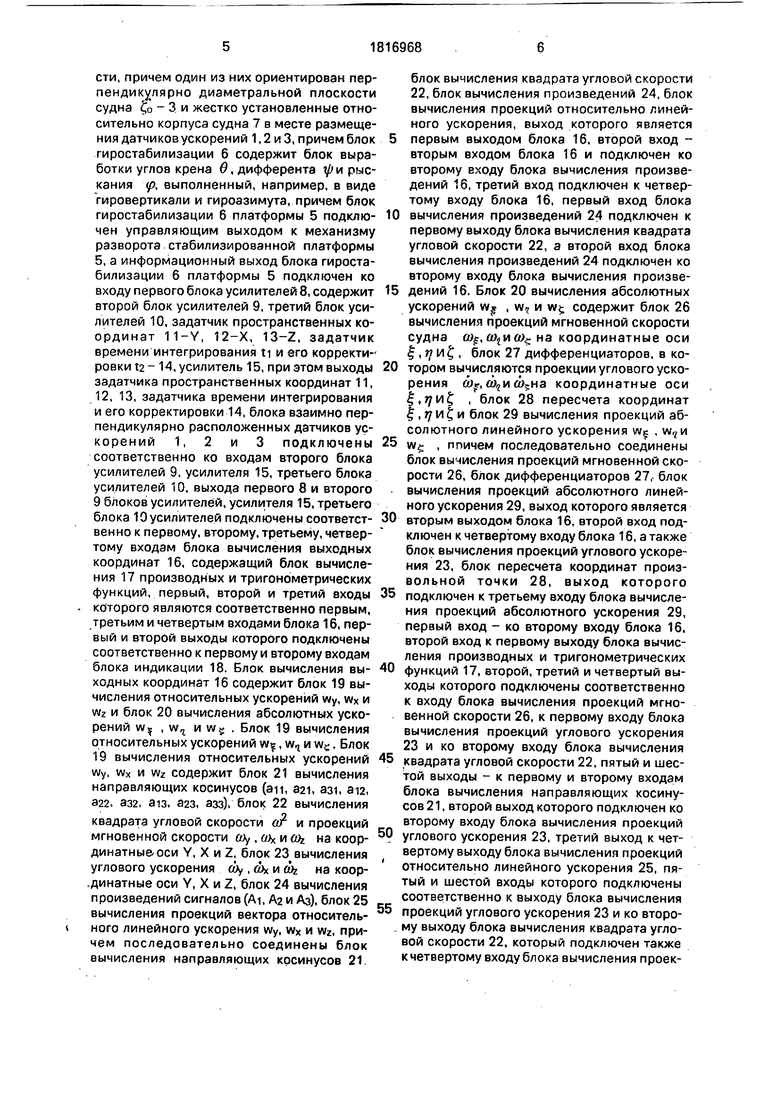
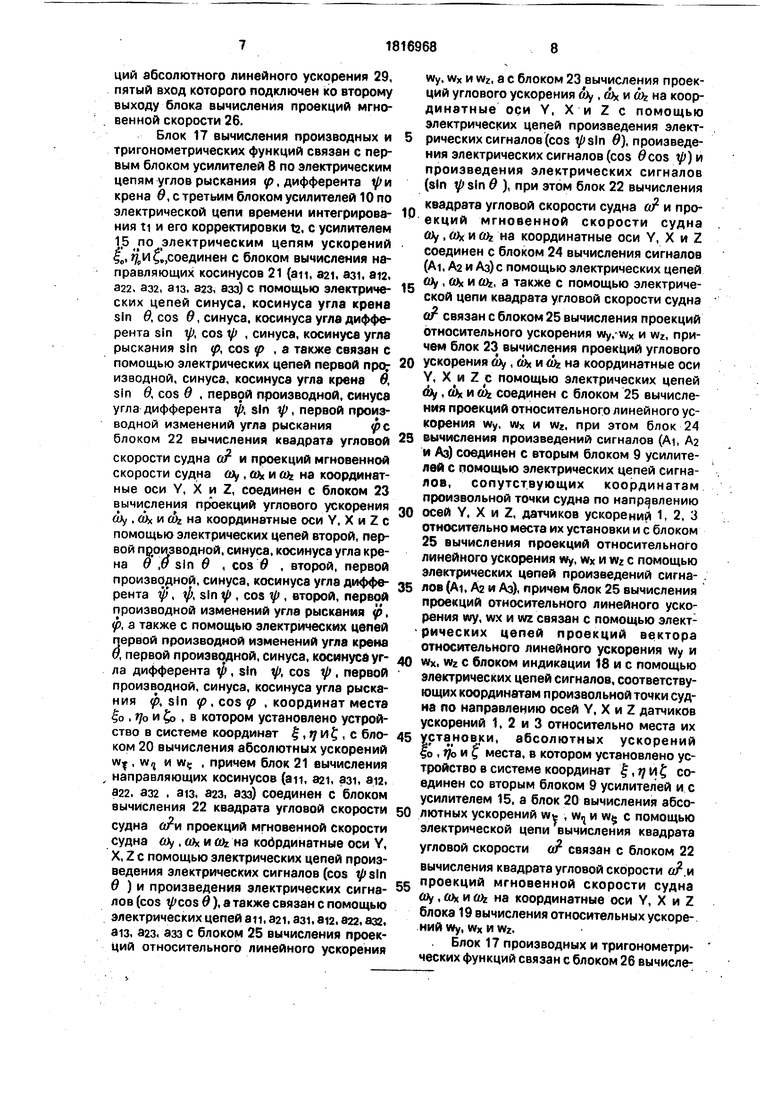
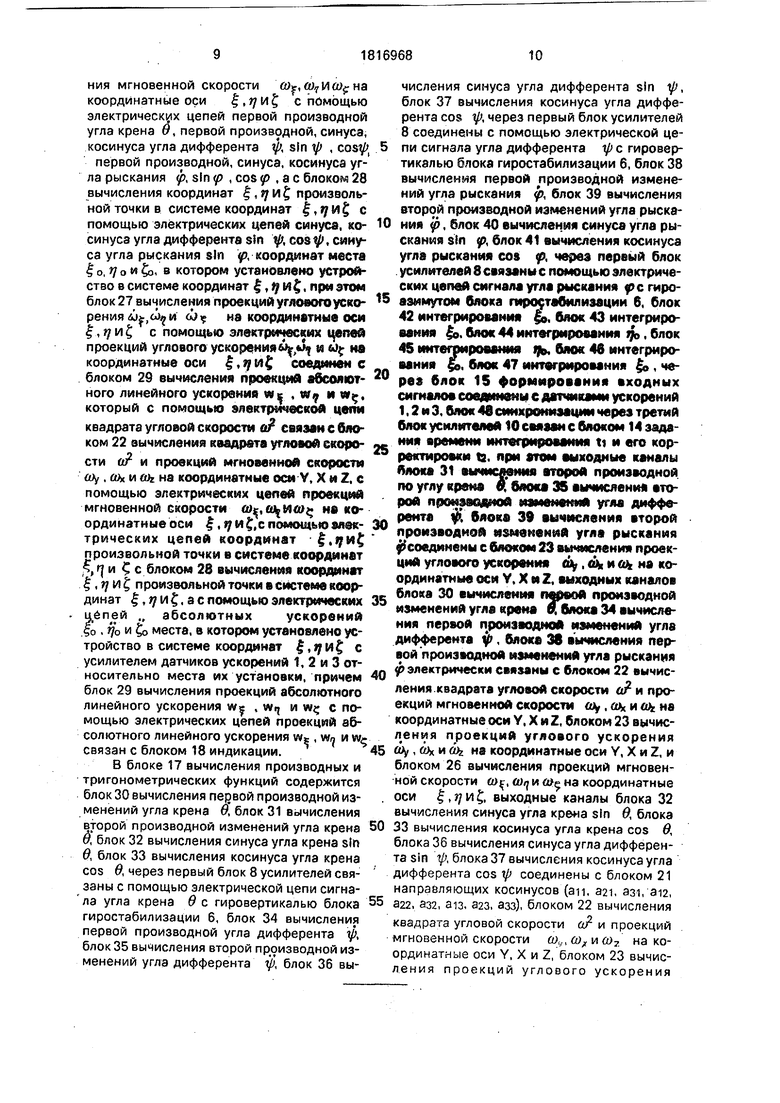

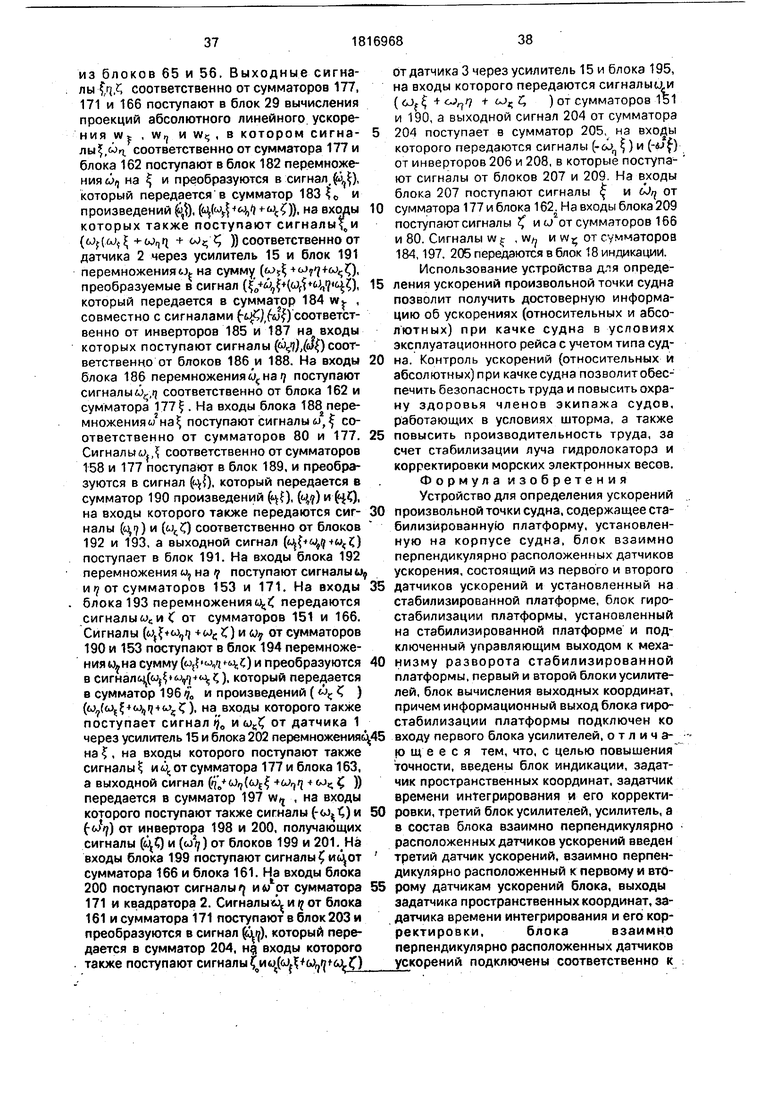
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2106006C1 |
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| Устройство управления боковым движением летательного аппарата | 1990 |
|
SU1751717A1 |
| Устройство для формирования изображения при коническом сканировании | 1989 |
|
SU1734233A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
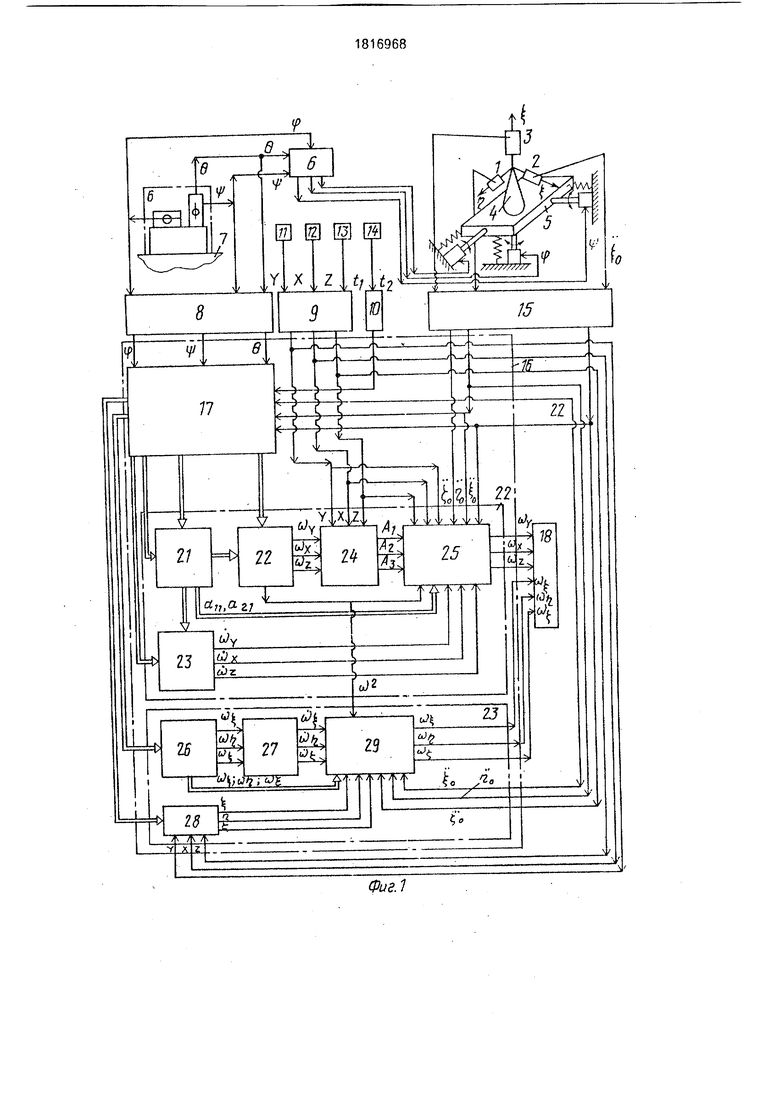

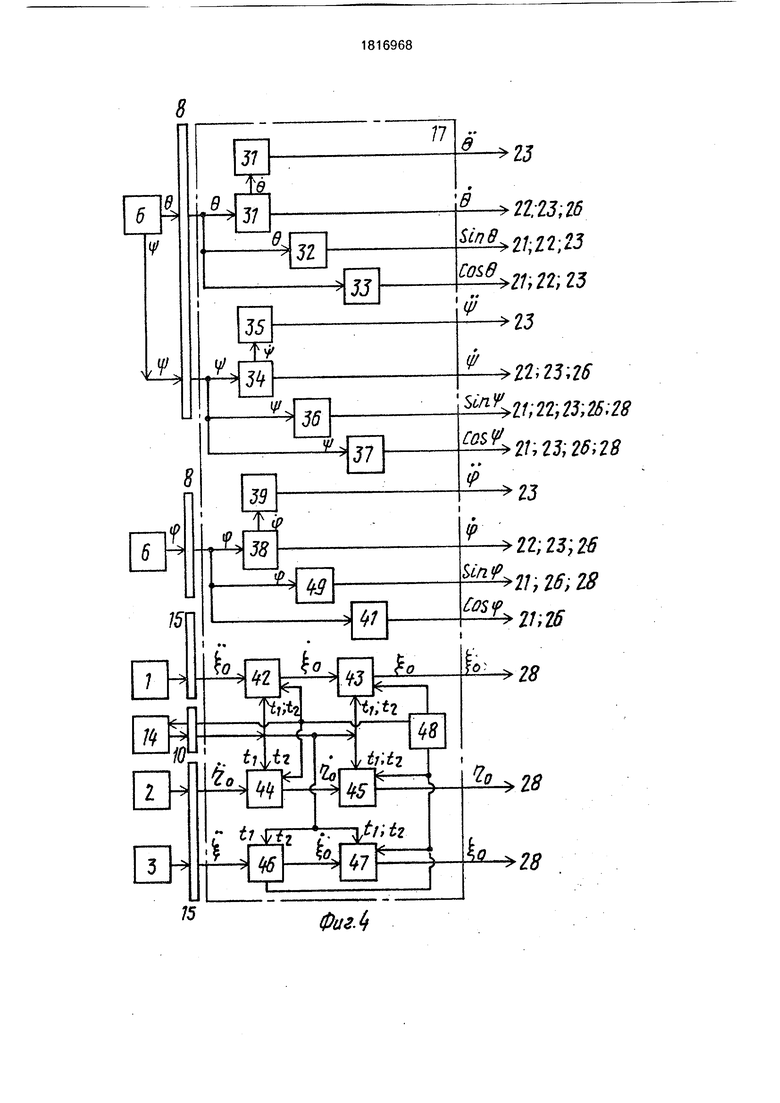
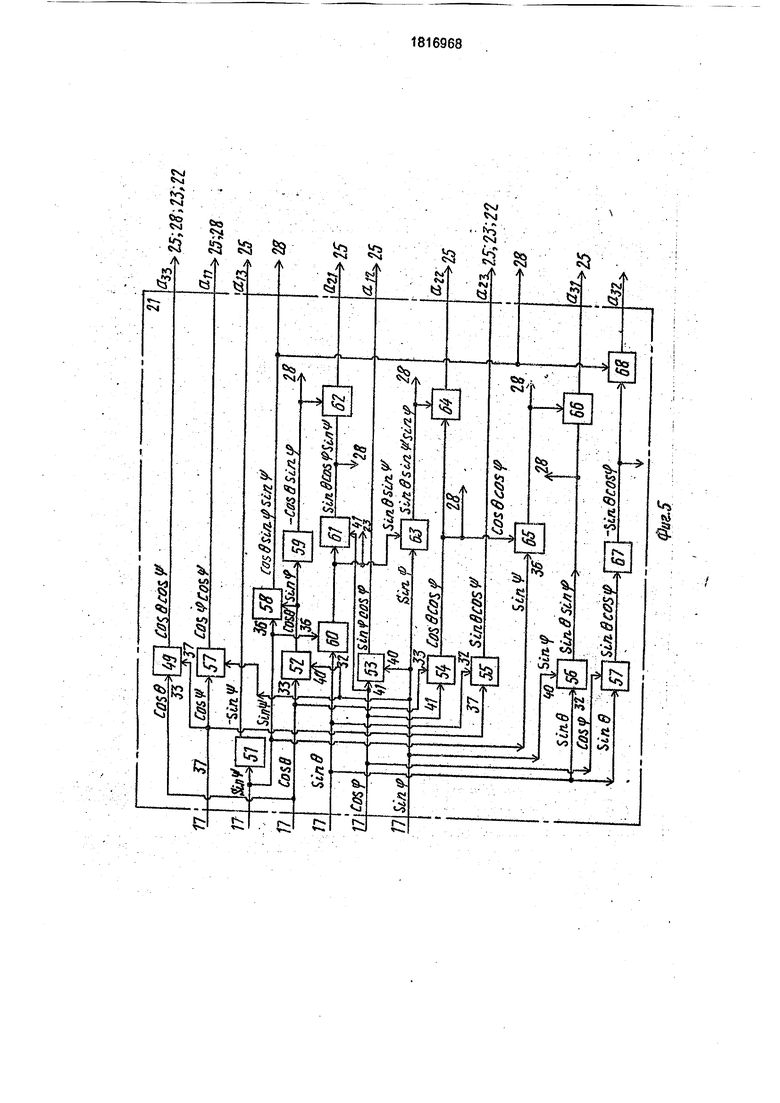
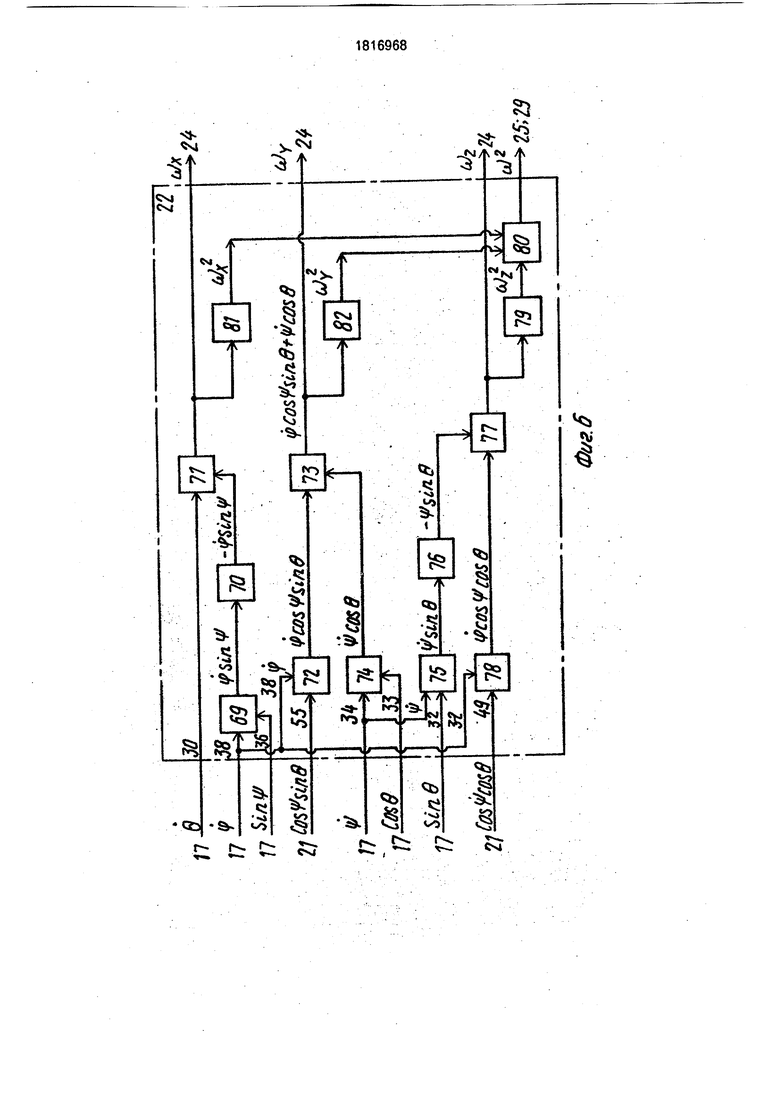
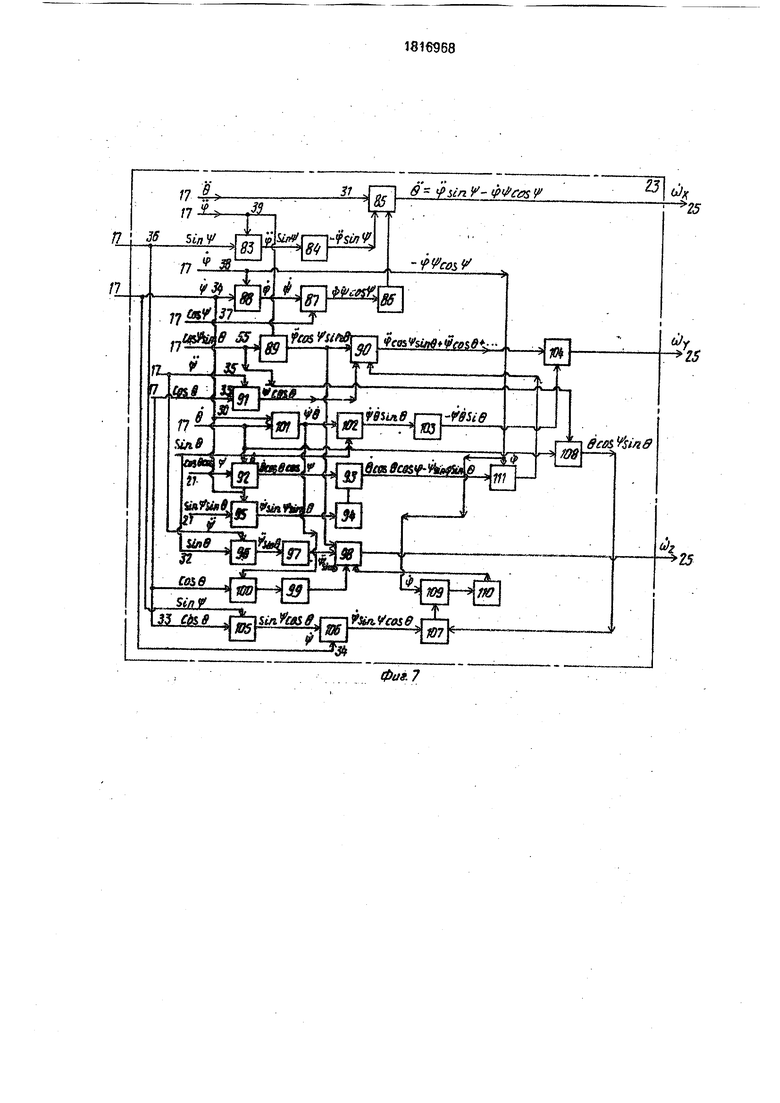
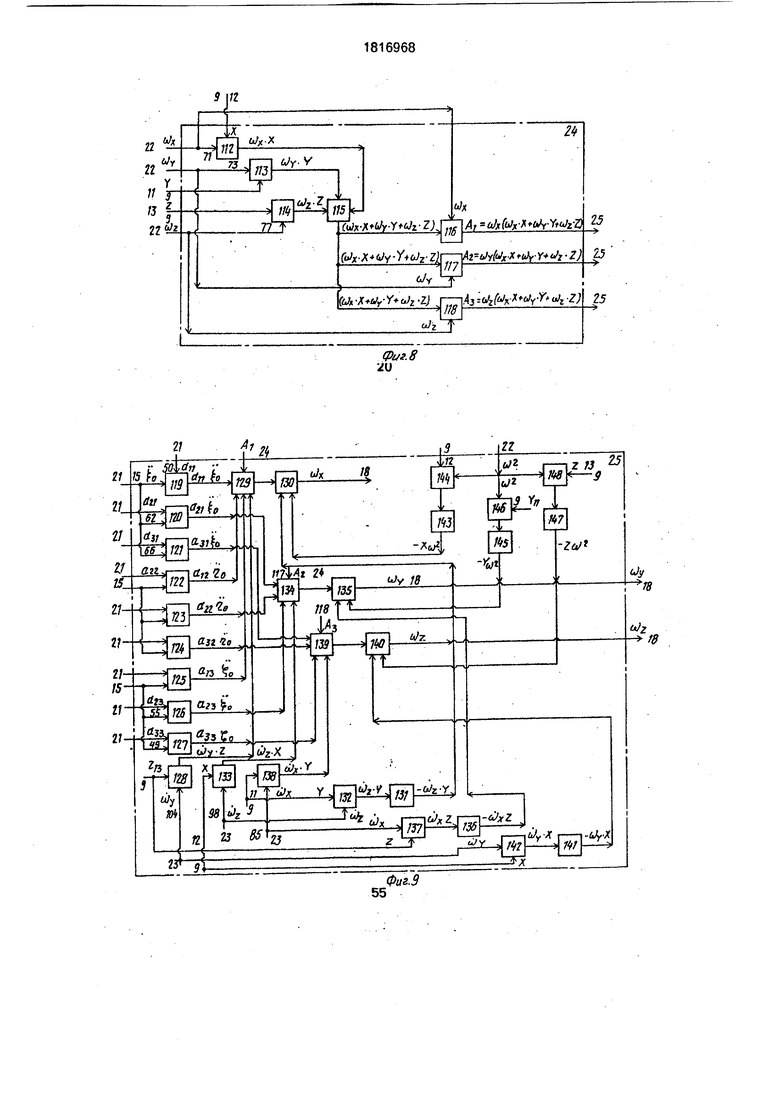
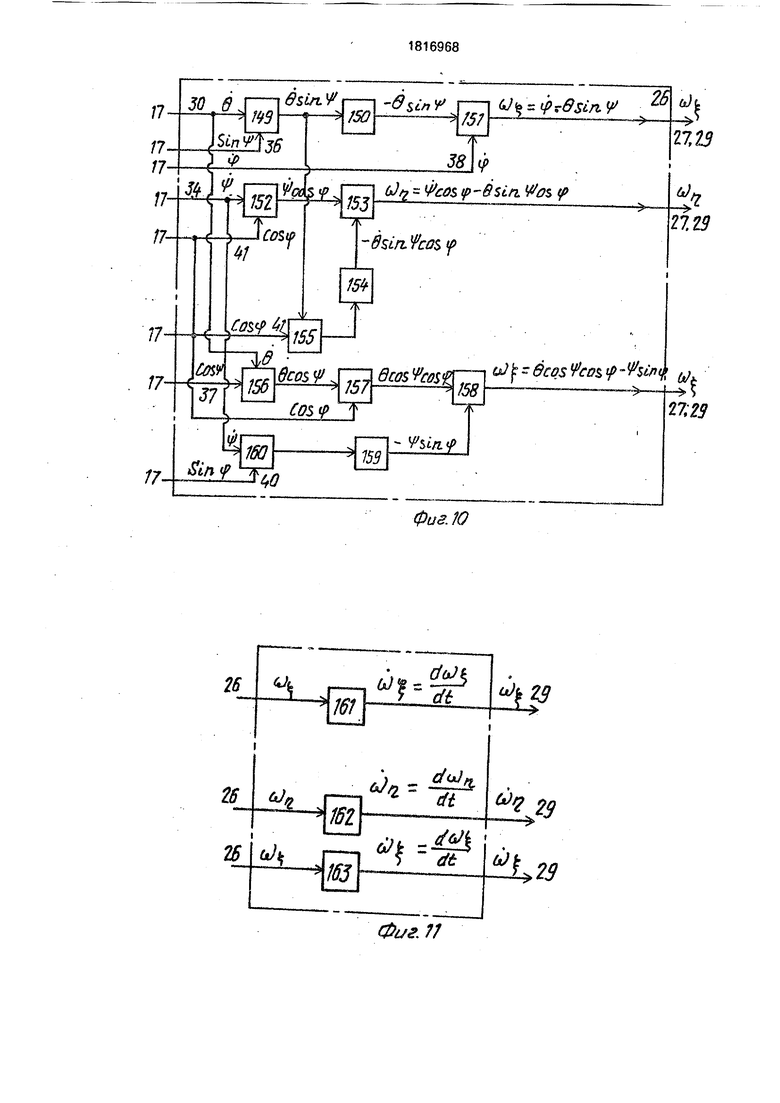
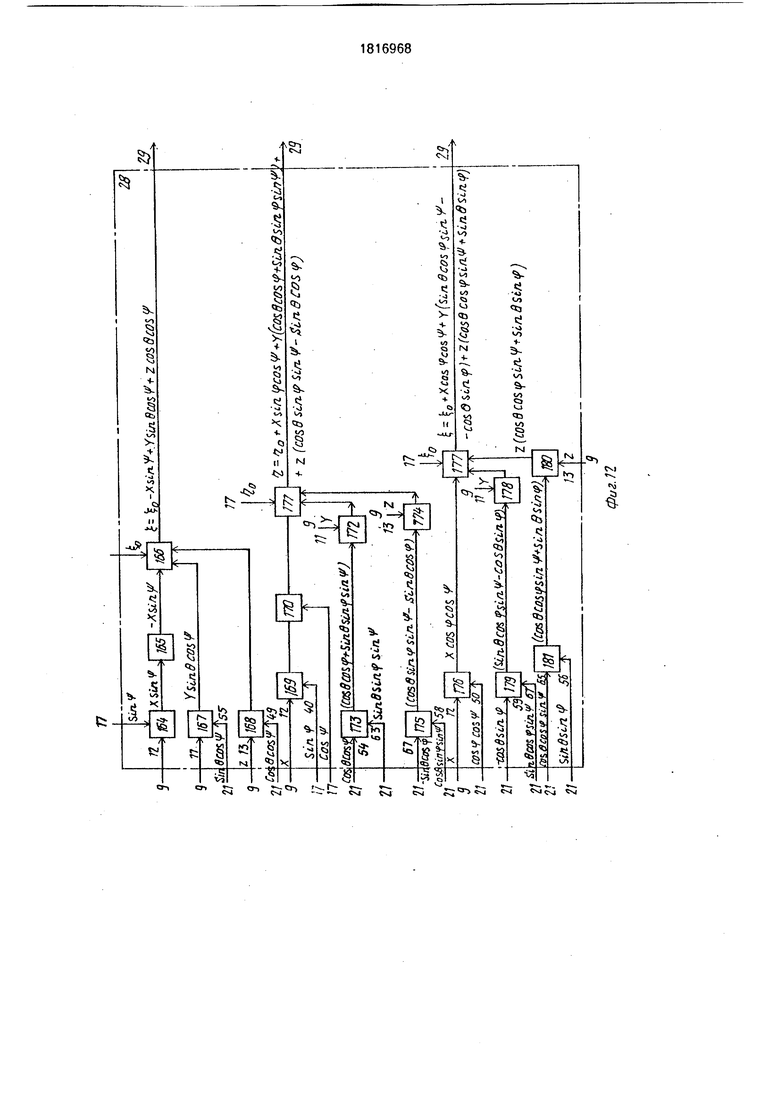
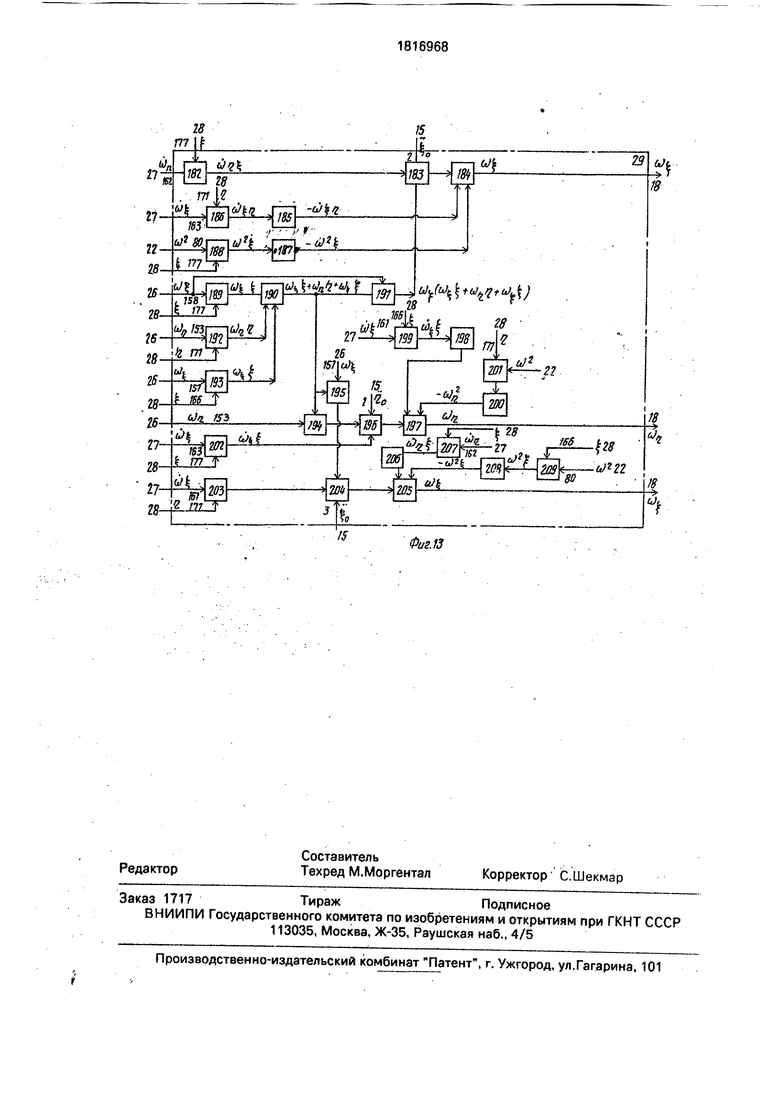
Изобретение относится к судостроению, в частности к автоматическим устройствам обеспечения безопасности судна на море. Цель изобретения - повышение точности. Цель достигается за счет того, что устройство содержит стабилизированную платформу, блок взаимно перпендикулярно расположенных датчиков ускорений, блок гиростабилиэации, первый, второй и третий блоки усилителей, усилитель, блок вычисления выходных координат. 13 ил.
фиг.З -- .
75
Фа г. t
21 Sl«b$i
1:
3 $оэдщ$.&$03Qin$
jjAW
,9Ј
tgg-Qfr,
/fi $j&yffv $
82
6v Sff$ffJ09
Ш
№
IS
Ц
ЈЈ
0SOJ
a
9
IS
X
a
17
1
17
21
V
СКвUnQ
СпУв&В
J«
Ik
JET .
ущв
н
1 5
75
fe/i0
75
-VStaff
&
78
УтУмзв
82
77
75
u//-ll
2
У
a)
- 5;
со о
(О
о со
Фи. 6
Гй%.
SI.
Х/г)
Ј2
8969t8
дрщ
ЬМЈ
flЈ
%A
Sf л
г/
/A S иг
#
%
1T
«с . /у i
SI
sn
(Z- V wtyWfy--Г fZ-
«
fz v x--V x-i/4; H
72-z/9 /- Xp-Jfrt)
f2
fZ- +A-VJ+l -W
П7.
8 гпФ
U
Tfl
-i //
ш/
Ј2
Xх/
W
Л/,
/4
ZZ ZZ
896918I
физ. Ю
Фиг. 7
См
«V,
NI
4
tvl
Cv(«MC-J «VI
| Устройство для измерения пути, пройденного движущимся телом | 1958 |
|
SU115818A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
