i I
I Изобретение относится к конвейеро |строению9 в частности к устройствам, контролирующим условия работы грузо- носителей, а именно скребков, путем |определения характеристик тела воло:ЧенИЯе
; Целью изобретения является повышение надежности определения характеристик тела волочения.
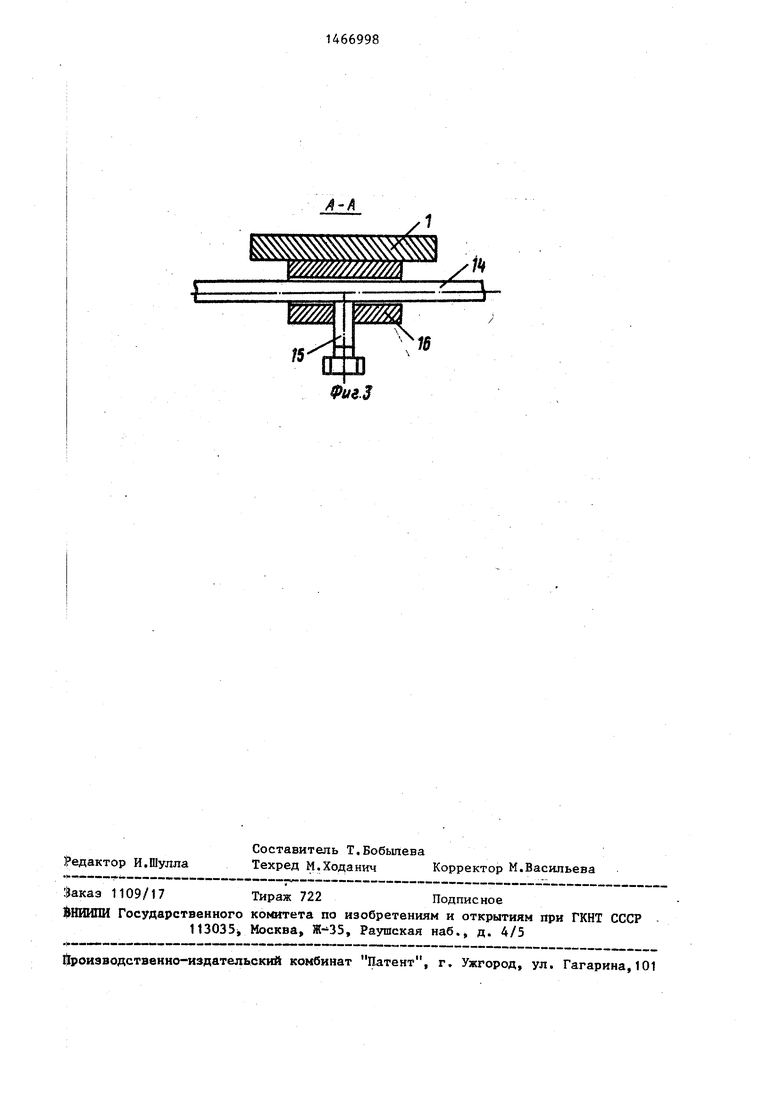
На фиг, 1 изображен стенд для определения характеристик тела волочения при тра.нспортировании скребком, вид сбоку; на фиг. 2 - то-же, вид I сверхуJ на фиг. 3 - сечение А-А на |фиг. 1 (по узлу фиксации каретки). i Стенд для определения характеристик тела волочения при транспортировании скребком включает каретку 1 с плитой 2, на которой жестко закреплены стойки 3 коллиматоров источника 4 и приемника 5 гамма-излучения, несущую конструкцию, выполненную в виде рамы 6, на которой жестко закреплены желоб 7 и .направляющие 8 ,чля каретки 1, механизм 9 вертикального перемещения плиты 2 в виде простран- ственного четырехзвенника, установленный на каретке 1 узел 10 фиксации каретки 1 и основание 11, соединенное с рамой б посредством вертикальных опор 12, расположенных с одного края рамы и соединенных с ней шарнирно, и домкрата 13 перемещения несущей конструкции, расположенного с другого края рамы с возможностью изменения угла наклона желоба 7.
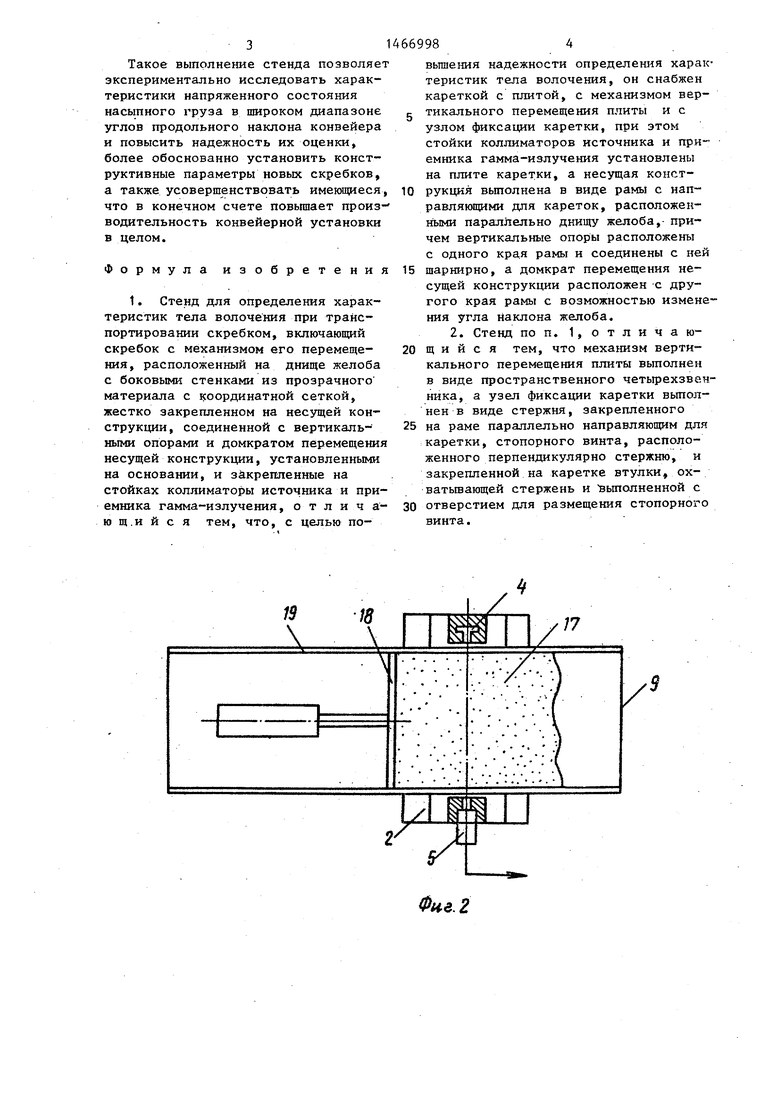
Узел 10 фиксации каретки включает стержень 14, закрепленный на раме 6 параллельно направляющим 8, стопорный винт 15 и втулку 16, закрепленную на каретке 1 и охватывающую стержень 14. Ось винта 15 перпендикулярна оси стержня 14. Перемещение
насыпного груза 17 осуществляется скребком 18, который имеет вьшолнен- ный, например, в виде домкрата механизм перемещения и расположен на днище желоба 7, который имеет проз-
o рачные стенки 19, на которые нанесена координатная сетка 20.
Устройство работает следующим образом.
5 Насыпной грунт 17 помещают в желоб 7. С помощью домкрата 13 желоб 7 устанавливается под требуемым углом к горизонту. Затем перемещением скребка 18 формируют тело волочения Выставление коллиматоров источника 4 и приемника 5 против исследуемой зоны неподвижного тела волочения осуществляется по координатной сетке 20 следующим образом. По горизонтали - путем перемещения каретки 1 по направляющим 8. Далее каретка 1 с плитой 2, на которой жестко закреплены стойки.3 коллиматоров, фиксируется
.т
относительно рамы 6 поворотом стопорного винта 15 в резьбовом отверстии втулки 16 до упора в стержень 14. По вертикали коллиматоры выставляются с помощью механизма 9 вертикального перемещения плиты 2. После .
5 этого вьшолняется замер интенсивности гамма-излучения. По результа- . там замеров в различных зонах тела золочения определяются его характеристики.
0
5
0
Такое выполнение стенда позволяет экспериментально исследовать характеристики напряженного состояния насыпного груза в широком диапазоне углов продольного наклона конвейера и повысить надежность их оценки, более обоснованно установить конструктивные параметры новых скребков, а также усовершенствовать имеющиеся, что в конечном счете повьппает произ- водительность конвейерной установки в целом.
вьппения надежности определения характеристик тела волочения, он снабжен кареткой с плитой, с механизмом верg тикального перемещения плиты и с узлом фиксации каретки, при этом стойки коллиматоров источника и приемника гамма-излучения установлены на плите каретки, а несущая конст10 рукция вьшолнена в виде рамы с нап равлякмцими для кареток, расположенными параллельно днищу желоба,- причем вертикальные опоры расположены с одного края рамы и соединены с ней
Формула изобретения 15 шарнирно, а домкрат перемещения несущей конструкции расположен с другого края рамы с возможностью изменения угла наклона желоба.
2. Стенд по п. 1, о т л и ч а ю20 щ и и с я тем, что меха1шзм вертикального перемещения плиты вьшолнен в виде пространственного четьфехзвен- ника, а узел фиксации каретки вьшол- нен в виде стержня, закрепленного
25 на раме параллельно направляющим для каретки, стопорного винта, расположенного перпендикулярно стержню, и закрепленной на каретке втулки, ох- ватьшающей стержень и вьшолненной с
30 отверстием для размещения стопорного винта.
1. Стенд для определения характеристик тела волочения при транспортировании скребком, включающий скребок с механизмом его перемещения, расположенный на днище желоба с боковыми стенками из прозрачного материала с координатной сеткой, жестко закрепленном на несущей конструкции, соединенной с вертикальными опорами и домкратом перемещения несущей конструкции, установленными на основании, и закрепленные на стойках коллиматоры источника и приемника гамма-излучения, о т л и ч а- ю щ.и и с я тем, что, с целью по
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для определения характеристик тела волочения при транспортировании скребком | 1986 |
|
SU1373643A1 |
| Стенд для контуровки корпусных конструкций | 1983 |
|
SU1100187A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Передвижной стенд для ремонта думпкаров | 1989 |
|
SU1673239A1 |
| ДИАГНОСТИЧЕСКИЙ РЕНТГЕНОГРАФИЧЕСКИЙ СКАНИРУЮЩИЙ ЦИФРОВОЙ АППАРАТ | 2006 |
|
RU2328217C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033602C1 |
| УСТРОЙСТВО КАЛИБРОВКИ АВТОМОБИЛЬНОЙ ПЛОЩАДКИ РЕГУЛИРОВОЧНЫХ СТЕНДОВ | 2005 |
|
RU2352897C2 |
| Стенд для испытания верхняков | 1981 |
|
SU972116A1 |
| Поперечный гамма-томограф | 1982 |
|
SU1050666A1 |
| Стенд для сборки мостовых кранов | 1976 |
|
SU609715A1 |
Изобретение относится к конвей- еростроению и позволяет повысить надежность определения характеристик тела волочения. На несущей конструк™ 1ДИИ в виде рамы (Р) 6 жестко закреплены желоб (Ж) 7 и направляющие 8 для каретки (К) 1, расположенные параллельно днищу Ж 7. Боковые стенки 19 Ж 7 вьтолнены из прозрачного материала с координатной-сеткой 20. На днище Ж 7 размещен скребок 18 с механизмом перемещения в виде домкрата. На апите 2 К 1 жестко закреплены стойки 3 коллиматоров источника 4 и приемника гамма-излучения. Механизм 9 вертикального перемещения плиты 2 выполнен в виде пространственного четырехзвенника, установленного на К 1. Основание 11 соединено с Р 6 посредством вертикальных опор, размеS
19
18
/
У
17
/
0tis.2
Фи9.3
| Эйдерман Б.А | |||
| Закономерности формирования грузопотока и энергозатрат на скребковых конвейерах | |||
| - М.: Наука, 1984, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Стенд для определения характеристик тела волочения при транспортировании скребком | 1986 |
|
SU1373643A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
