Известные мостовые грузоподъемные краны, содержащие две и более механически не связанные между собой тележки не обеспечивают равного тормозного пути, проходимого тележками, что исключает получение необходимой точности установки груза.
Для избежания указанного недостатка в цепь обмоток приводных электродвигателей включены две группы контактов для последовательного включения обмоток приводных электродвигателей в момент динамического торможения и автоматического подключения к источнику тока.
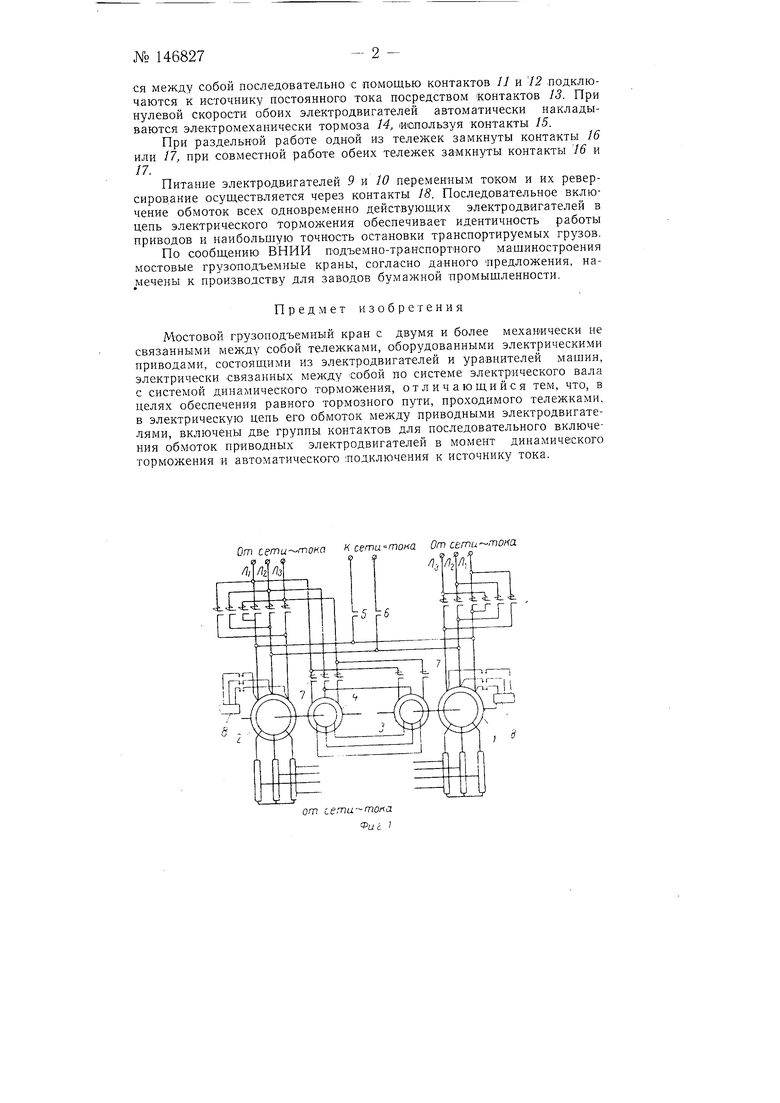
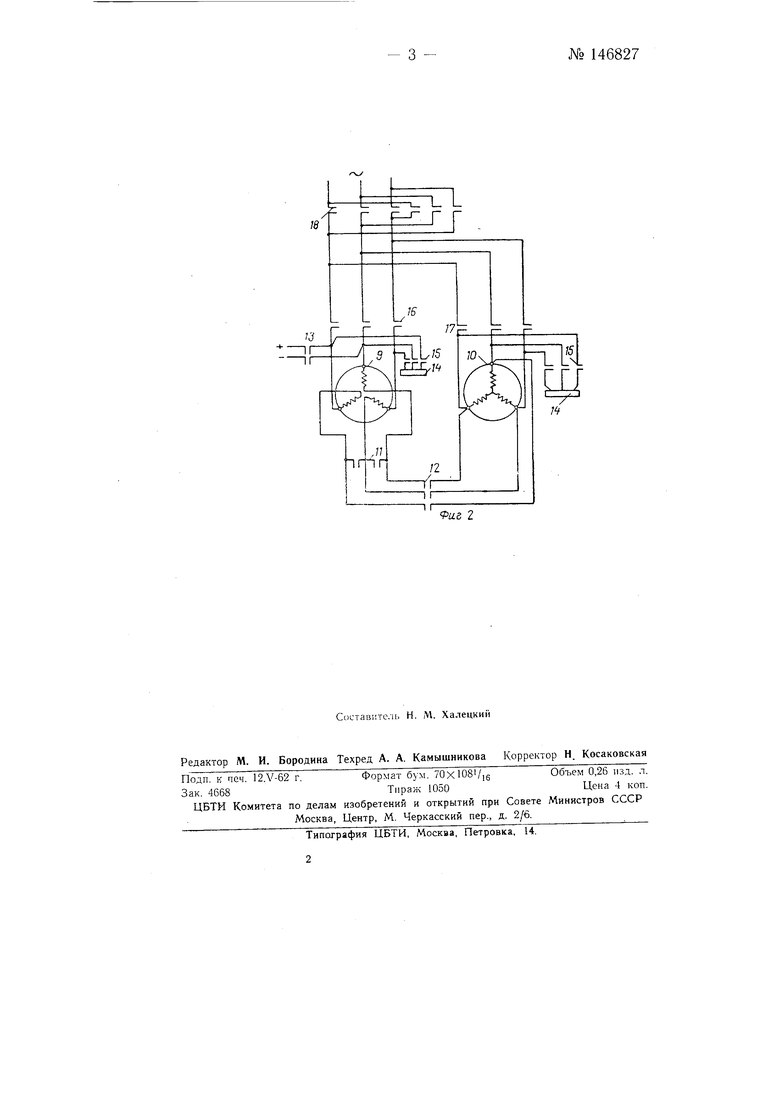
На фиг. 1 показана схема электрического привода механизмов подъема обеих тележек; на фиг. 2 - схема электрического привода механизмов передвижения.
В качестве электрического привода механизма подъема обеих тележек крана применены электродвигатели / и2 и уравнительные машины 3 и 4, электрически связанные между собой. Уравнительные машины 3 и 4, включенные по системе электрического вала совместно с динамическим торможением, которое осуществляется путем иодачи -на статорные обмотки электродвигателей 1 к 2 постоянного тока, обеспечивают синхронизацию по пути и скорости при одновременной работе обоих механизмов подъема и автоматически исключают перекосы. Реверсирование электродвигателей 7 и 2 осуществляется с по.мощью контактов 5 и 6, л включение уравнительных мащин и их синфазность с помощью контактов 7. АвтОМатический иодхват груза в конце пути торможения производится электромагнитным тормозом 8. Электрический привод механизмов передвижения состоит из электродвигателей 9 и W, связанных между собой общей схемой управления, допускающей как раздельную работу каждой тележки, так и их совместную работу. При совместной работе тележек для обеспечения равного тормозного пути каждой тепежки Применена система динамического торможения. В момент динамического торможения обмотки электродвигателей .9 ц W соединяются между собой последовательно с помощью контактов 1J и 12 подключаются к источнику постоянного тока посредством контактов 13. При нулевой скорости обоих электродвигателей автоматически накладываются электромеханически тормоза 14, используя контакты 15.
При раздельной работе одной из тележек замкнуты контакты 16 или 17, при совместной работе обеих тележек замкнуты контакты 16 и 17.
Питание электродвигателей 9 10 переменным током и их реверсирование осуществляется через контакты 18. Последовательное включение обмоток всех одновременно действующих электродвигателей в цепь электрического торможения обеспечивает идентичность работы приводов и наибольщую точность остановки транспортируемых грузов.
По сообщению ВНИИ подъемно-транспоргного машиностроения мостовые грузоподъемные краны, согласно данного предложения, намечены к производству для заводов бумажной промыщленности.
Предмет изобретения
Мостовой грузоподъемный кран с двумя и более механически не связанными между собой тележками, оборудованными электрическими приводами, состоящими из электродвигателей и уравнителей мащин, электрически связанных меледу собой по системе электрического вала с системой динамического торможения, отличающийся тем, что, в целях обеспечения равного тормозного пути, проходимого тележками, в электрическую цепь его обмоток между приводными электродвигателями, включены две группы контактов для последовательного включения обмоток приводных электродвигателей в момент динамического торможения и автоматического тюдключения к источнику тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический кран для подъема и транспортирования разномерных грузов | 1959 |
|
SU127799A1 |
| Подъемно-опускное устройство для подачи вагонеток с деталями в многоярусные камеры твердения железобетонных изделий | 1959 |
|
SU129314A1 |
| Моторный грейфер | 1956 |
|
SU105649A1 |
| Мостовой грузоподъемный кран с траверсой | 1961 |
|
SU142737A1 |
| Устройство для защиты механизма изменений вылета стрелы плавучих кранов | 1961 |
|
SU143992A1 |
| Кран мостового типа с гидравлическим приводом механизма подъема | 1961 |
|
SU142736A1 |
| Устройство для дистанционного управления кранами | 1961 |
|
SU144975A1 |
| Кран мостового типа с гидравлическим приводом механизма подъема | 1959 |
|
SU123301A1 |
| Крановая тележка | 1959 |
|
SU127371A1 |
| Программное устройство | 1960 |
|
SU138181A1 |
От с emu-тока к От сети-гпока
от cemu-Tiorta
/.Н4 ис
18
Ра 2
