Известные устройства для дистанционного управления различными машинами, состоящие из сельсина-датчика, сельсина-нриемника, исполнительного двигателя, приводящего во вращение командоконтролер или контролер с помощью перфорации имеют большое количество аппаратов и сравнительно большие габариты сельсинов.
Предлагаемое устройство, состоящее из индукционных преобразователей и реле, устроено более просто. Система устройства позволяет передавать большое количество сигналов для управления механизмами бесконтактным способом. В устройстве в качестве программирующего элемента применен укрепленный на оси рамки индукционного преобразователя-приемника диск с перфорацией, вращающийся синхронно с рамкой преобразователя-датчика.
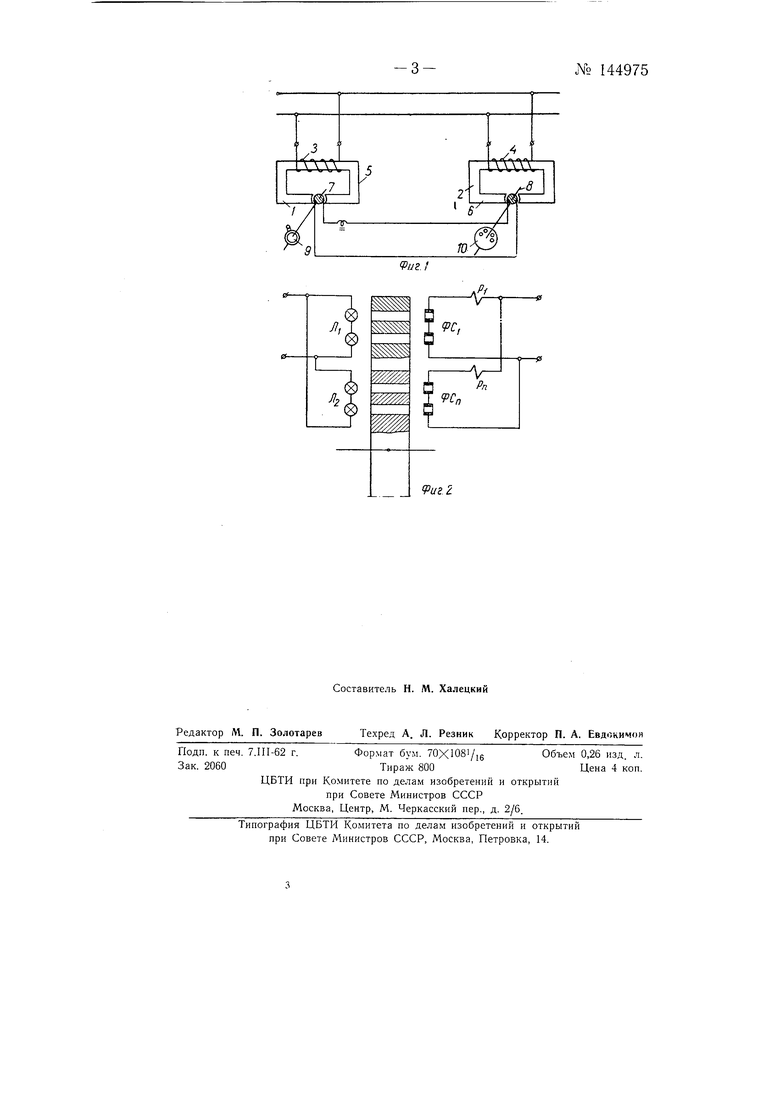
На фиг. 1 показана схема устройства; на фиг. 2-схема устройства для программы управления.
Устройство состоит из двух индукционных преобразователей: датчика У и приемника 2, обмотки 5 и 4 возбуждения которых расположены на магнитопроводах 5 и 5 и подключены к электросети. Рамки 7 и S расположены в расточках магнитопроводов. На оси рамки 7 преобразователя-датчика / укреплен рычаг 9 управления, а на оси рамки 8 преобразователя-приемника 2 укреплен перфодиск, на котором записана команда управления. Для передачи, например, команды «вперед рукоятка рычага управления поворачивается на определенный фиксированный угол в. В результате этого рассогласования равенство э.д.с. рамок будет нарушено и в рамках появится уравнительный ток, который, протекая по рамке 8 преобразователя-приемника 2 -л взаимодействуя с магнитным полем в воздушном зазоре, создает врашающий момент, под действием которого рамка 8 преобразователя-приемника начнет по№ 144975- 2 ворачиваться до тех пор пока не будет отработан заданный угол. При этом э.д.с. обеих рамок будут равны, а результирующая э.д.с и уравнительный ток будет равен нулю.
Перфодиск 10, жестко закрепленный на оси рамки 8, поворачивается также на заданный угол, при этом его отверстия, при помощи которых записана команда «вперед, совпадают с осью осветителей Л . .. Лп и фотосопротивлений ФС. . . ФСп отчего срабатывает реле Р . .. РП и команда будет передана контактору «вперед магнитного контроля.
Точно так же будут приниматься команды «назад ввода или вывода пусковых ступеней сопротивлений. Система считывания информации с перфодиска, система кодирования команд и система передачи угла проверены на лабораторных установках.
Предмет изобретения
Устройство для дистанционного управления кранами по заданной программе, содержащее индукционные преобразователи, реле и програмл1ирующий элемент, перемещающийся между осветителями и фотоэлементами, к выходу которых подключены исполнительные органы, отличающееся тем, что, с целью упрощения устройства, в качестве программирующего элемента применен укрепленный на оси рамки индукционного пpeoбpaзoвaтeля-пJ)иeмникa диск с перфорацией, вращающийся синхронно с рамкой преобразователя-датчика, поворот которой на заданный угол осуществляется при помощи рукоятки управления.
Pi
РС,
9-f
Рп
PCi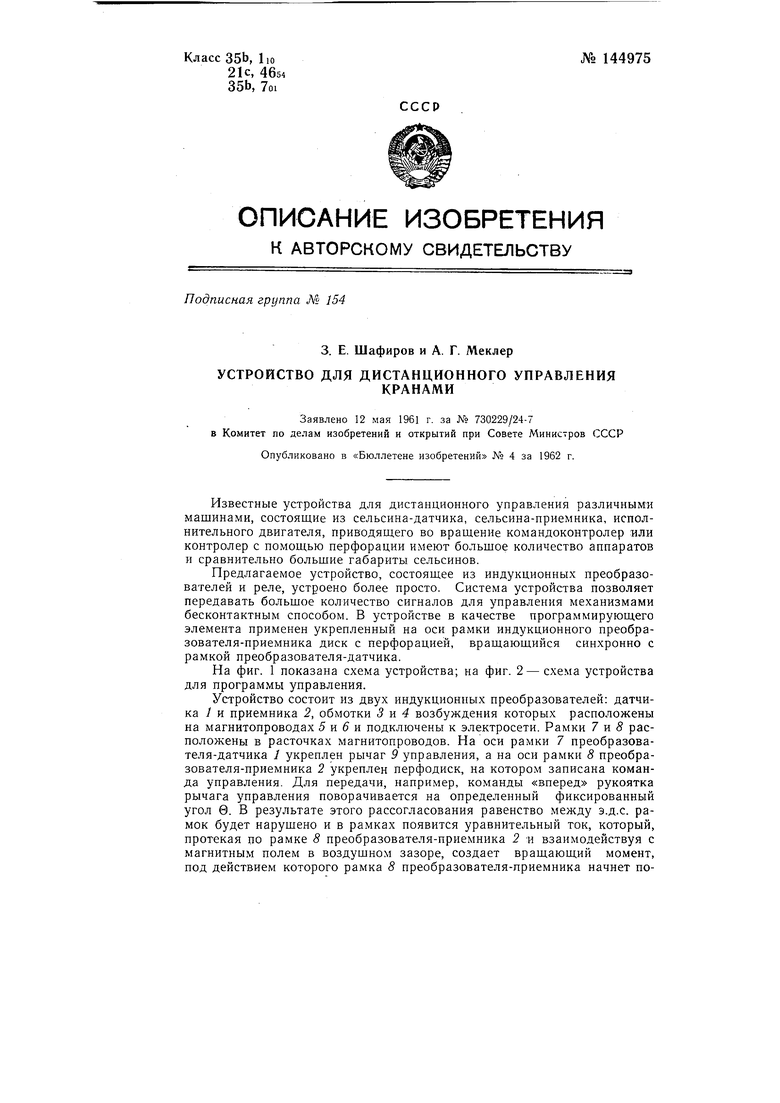
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство | 1960 |
|
SU138181A1 |
| Устройство для защиты механизма изменений вылета стрелы плавучих кранов | 1961 |
|
SU143992A1 |
| Мостовой грузоподъемный кран | 1961 |
|
SU146827A1 |
| Устройство для дистанционного управления транспортной тележкой | 1960 |
|
SU132291A1 |
| Система синхронной связи | 1946 |
|
SU69777A2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯКРАНОМ | 1968 |
|
SU218391A1 |
| Шаговый электрогидравлический привод с дискретным управлением | 1979 |
|
SU774322A1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| СИНХРОННО СЛЕДЯЩАЯ СИСТЕМА ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ПРОСТРАНСТВЕННЫХ УГЛОВ | 1967 |
|
SU203025A1 |