Изобретение относится к техническим средствам обучения вождению земных гусеничных тракторных средств и может быть использовано в учебных заведениях для подготовки мехзлгл- ков водктелей«
Цель изобретения - повышение точности работы тренажера путем приближения условий обучения ria нем к ре-- альным условиям вожденияНа фиг „ 1 изображег тренажер, вид сбоку, ка фиг,, 2 - то же, вид, в плане, на фиг„ 3 - разрез А-А на фиг, 1, Тренажер гусег ичной машины содержит основание 1„ кабину 2 с сидением 3 и органами 4 управления ния J шаровую oiTopi 5 и соосную с ней цапфу 6, гидропривод 7 с дросселирующим золотником 8,, гид 1о-дилиндра- ми продольных 9 и псггеречных 10 колебаний- макет 11 местности, с источником 12 света, экра.н 13 и пульт 14 управления колебаниями кабины. Между основанием 1 и кабиной 2 установ- 23 ветствии с дорожной обстановкой, лены в распор упругие опоры 15, Со- создаваемой на экране 13 освечиваниосная с шаровой опорой .з цапфа 6 закреплена на стойке 16 в поперечной плоскости и с овмещена с ограничительным пазом 17, выполненным ка кабине 2 ,
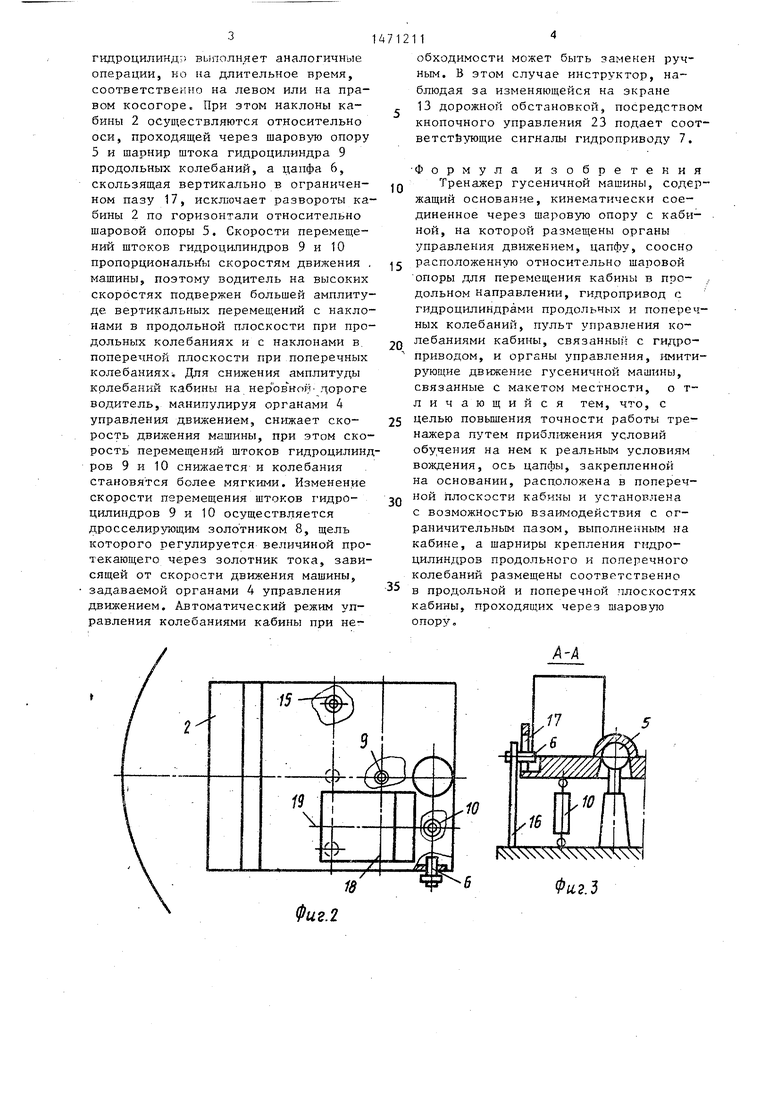
Гндроцилиндрь 9 и 10 установлень в распор между основанг.ем 1 и кабиной 2 5 причем ось гидроцилиндра 9 ,..
ем макета 11 местности источником 12 света, выбирается скорость движения машины путем изменения скорости
30 перемещения макета 11 местности. О неровностях дороги на экране 13 пульт 14 управления колебаниями кабины получает информацию от герко- нов 22, срабатывающих от магнитов 20 ПО.ЛУЧИВ соответствующую информацию, пульт 14 управления колебаниями кабины дает сигнал гидроприводу 7, который в зависимости от характера неровности включает в работу соответпродольных колеоанш .-... - .i- тикальной линией пересечения плоскости 18э секущей с:ид,ение 3 поперек, с плоскостью, прох.одяигей вдоль кабины 2 через ось шаровой опоры 5, а ось гидроцилиндра 10 поперечных колебаний совмвЕ ена с вертикальной линией пересечения плоскости 19, секущей сидение вдоль; с плоскостью, проходящей через оси шаровой опоры 5 и цапфы. 6, Ма.кет 11 местности снаб жен магнитами 20, установленными сверху заподли.цо с его вогнутой сферической поверхностью в местах неровностей на пути дв1-№:ення„ На стойке 21 под макетом Т местности закреплены герконы 22 у ,ый и.з которых задействован на конкретную неровность рельефа., а именно; Ухаб по ширине, дороги , Локальное возвышение по ширине дороги ; Оозвынаение под правой гусеницей или разбитая колея под левой гусег ицей. Возвышение под левой гусеницей или разбитая колея под поагюй гусенип.ей.
Спуск на дороге.
Косогор влево.
, Подъем дороги , .Косогор вправо. Под воздействием магнитного поля
магнитов 20 контакты герконов 22, задействованных на первые четыре неровности, замыкаются кратковременно, а контакты герконов 22, задействован- на последующие четыре неровноети, ;:-а1-.ыкаются на все время движения в зоне местной неровности. Пульт 14- управления колебаниями кабины связан с изображением местности на экране 13 органами 4- управления движением,
гидроприводом 7 и герконами 22, Кроме герконов 22 с магнитами 20, обеспечивающих работу пульта 14 управления колебаниями кабины в автомати- ческом режиме 5 последний оснащен
кнопочным управлением. 23, предназначенным для руководства процессом обучения непосредственно инструктором.
При обучении на тренажере в соот
ем макета 11 местности источником 12 света, выбирается скорость движения машины путем изменения скорости
перемещения макета 11 местности. О неровностях дороги на экране 13 пульт 14 управления колебаниями кабины получает информацию от герко- нов 22, срабатывающих от магнитов 20. ПО.ЛУЧИВ соответствующую информацию, пульт 14 управления колебаниями кабины дает сигнал гидроприводу 7, который в зависимости от характера неровности включает в работу соответствующий гидроцилиндр колебаний кабины. На ухабе или на локальном возвышении по ширине дороги гидроци
линдр 9 продольных колебаний соответственно опускает или поднимает ка- бину 2 относительно оси, проходящей через шаровую опору 5 и цапфу 6, ка короткое время в движении по дороге. Этот же гидроцилиндр выполняет аналогичные операции, но на длительное время, соответственно при спуске или на подъеме. При наезде на возвышение под правой гусеницей или при въезде в разбитую колею под левой гусеницей гидроцилиндр 10 поперечных колебаний работает на опускание, а при наезде на возвышение под левой гусеницей или при въезде в разбитую колею под цравой гусеницей - на подъем на коротко.е время. Этот же
гидроцилинд;) выполн яет аналогичные операции, ко на длительное время, соответственно на левом или на правом косогоре. При этом наклоны кабины 2 осуществляются относительно оси, проходящей через шаровую опору 5 и шарнир штока гидроцилиндра 9 продольных колебаний, а цапфа 6, скользящая вертикально в ограниченном пазу 17, исклзочает развороты кабины 2 по горизонтали относительно шаровой опоры 5. Скорости перемещений штоков гидроцилиндров 9 и 10 пропорциональны скоростям движения , машины, поэтому водитель на высоких скоростях подвержен большей амплитуде вертикальных перемещений с наклонами в продольной плоскости при продольных колебаниях и с наклонами в, поперечной плоскости при поперечных колебанияхi Для снижения амплитуды колебаний кабины на нерЪв ной- дороге водитель, манипулируя органами 4 управления движением, снижает скорость движения машины, при этом скорость перемещений штоков гидроцилиндров 9 и 10 снижается и колебания становятся более мягкими. Изменение скорости перемещения штоков гидроцилиндров 9 и 10 осуществляется дросселирующим золотником 8, щель которого регулируется величиной протекающего через золотник тока, зависящей от скорости движения машины, задаваемой органами 4 управления движением. Автоматический режим управления колебаниями кабины при неФиг. 2
471211
обходимости может быть заменен ручным, В этом случае инструктор, наблюдая за изменяющейся на экране 13 дорожной обстановкой, посредством кнопочного управления 23 подает соот- ветстЁующие сигналы гидроприводу 7,
0
5
0
5
0
5
формула изобретения
Тренажер гусеничной машины, содержащий основание, кинематически соединенное через шаровую опору с кабиной, на которой размещены органы управления движением, цапфу, соосно расположенную относительно шаровой опоры для перемещения кабинь в про- ,, дольном направлении, гидропривод с гидроцилиндрами продольных и поперечных колебаний, пульт управления колебаниями кабины, связанный с гидроприводом, и органы управления, дашти- рующие движение гусеничной машины, связанные с макетом местности, о т- личающийся тем, что, с целью повьшгения точности работь; тренажера путем приближения условий обучения на нем к реальным условиям вождения, ось цапфы, закрепленной на основании, расположена в поперечной плоскости кабины и установлена с возможностью взаимодействия с ограничительным пазом, выполненным на кабине, а шарниры крепления гидроцилиндров продольного и поперечного колебаний размещены соответственно в продольной и поперечной плоскостях кабины, проходяш.их через шаровую опору,
А-А
Фи2.3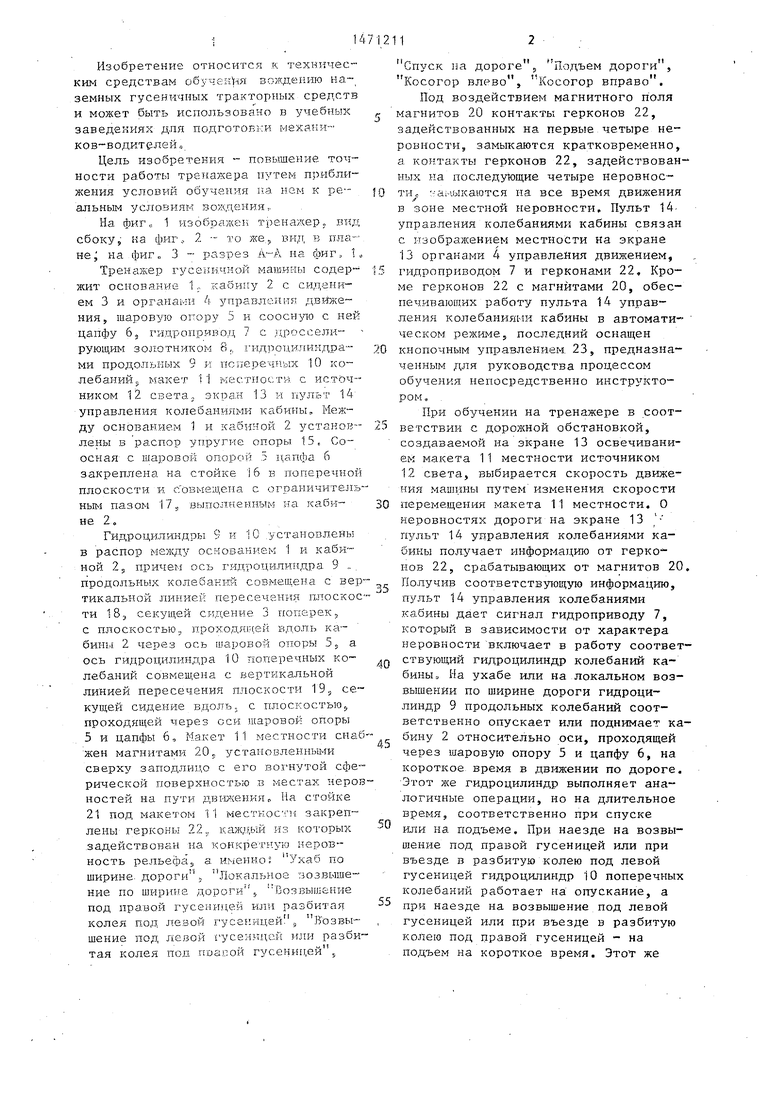
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер для обучения вождению гусеничной машины | 2020 |
|
RU2750122C1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
| Тренажер для водителя гусеничных машин | 1980 |
|
SU909673A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
| Тренажер водителя транспортного средства | 1980 |
|
SU938298A1 |
| Тренажер для обучения вождению гусеничных машин | 1986 |
|
SU1345236A1 |
| Тренажер начальной подготовки оператора гусеничной машины | 2024 |
|
RU2832947C1 |
| Тренажер для обучения вождению гусеничных машин | 1987 |
|
SU1517056A1 |
| Тренажер | 1960 |
|
SU144311A1 |
Изобретение относится к техническим средствам обучения вождению наземных гусеничных транспортных средств. Цель изобретения - повышение точности работы тренажера за счет приближения условий обучения на нем к реальным условиям вождения. Тренажер содержит основание 1, кабину 2, гидропривод 7 с дросселирующим золотником 8 и гидроцилиндрами 9 продольных и 10 поперечных колебаний, установленных между основанием 1 и кабиной 2, шаровую опору 5 и соосную с ней цапфу 6, закрепленную на основании 1 и совмещенную с ограничительным пазом 17, макет 11 местности. Сигналы о неровностях дороги, изображенных на макете 11, поступают на пульт, управляющий золотником 8 гидропривода 7, который в зависимости от характера неровности включает в работу гидроцилиндры продольных 9 и поперечных 10 колебаний. 3 ил.
| Тренажер водителя транспортного средства | 1980 |
|
SU938298A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
