1
(21)4337343/40-11
(22)19о10„87
(46) 23.10„89о Бюл. № 39 (72) В„Н„ Кожуховский, С.А. Бегунов, М.И„ Ксепчук, А„Г. Завацкий, А.Ко Аблесимов, А.Б„ Ордынский и АоН, Терещенко
(53)629о113.014.9(088.8)
(56)Авторское свидетельство СССР № 1164767, кл. Г, 09 В 9/04, 1983.
(54)ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ГУСЕНИЧНЫХ МАШИН
(57)Изобретение относится к техническим средствам обучения и обеспечивает повышение надежности тренажера. Тренажер для обучения вождению гусеничных машин содержит макет кабины транспортного средства, кинопроектор, устройство имитации рельефа местности, электрическая схема которого включает электродвигатель 8 и блок управления им. Мостовая схема последнего состоит из фотодиодов 9, резисторов, дифференциального усилителя 14, генератора сигналов 15, компаратора 16, фазорасщепителя 17 и усилителей мощности о Обучаемый, воздействуя на органы управления транспортным средством, перемещает рамку с отображением рельефа местности, имитируя поворот вправо или влево. 3 ил.
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения вождению гусеничных машин | 1983 |
|
SU1164767A1 |
| Тренажер для обучения вождению гусеничных машин | 1986 |
|
SU1345236A1 |
| ТРЕНАЖЕР ВОЖДЕНИЯ | 1998 |
|
RU2150753C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| Тренажер гусеничной машины | 1987 |
|
SU1471211A1 |
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Тренажер начальной подготовки оператора гусеничной машины | 2024 |
|
RU2832947C1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| Тренажер профессиональной подготовки оператора гусеничной машины | 2022 |
|
RU2798765C1 |
Изобретение относится к техническим средствам обучения и обеспечивает повышение надежности тренажера. Тренажер для обучения вождению гусеничных машин содержит макет кабины транспортного средства, кинопроектор, устройство имитации рельефа местности, электрическая схема которого включает электродвигатель 8 и блок управления им. Мостовая схема последнего состоит из фотодиодов 9, резисторов, дифференциального усилителя 14, генератора сигналов 15, компаратора 16, фазорасщепителя 17 и усилителей мощности. Обучаемый, воздействуя на органы управления транспортным средством, перемещает рамку с отображением рельефа местности, имитируя поворот вправо или влево. 3 ил.
/J
СП
о
СП
а
фир.2
Изобретение относится к техническим средствам обучения, преимущественно к средствам обучения вождению гусеничных машин.
Цель изобретения - повьппение надежности
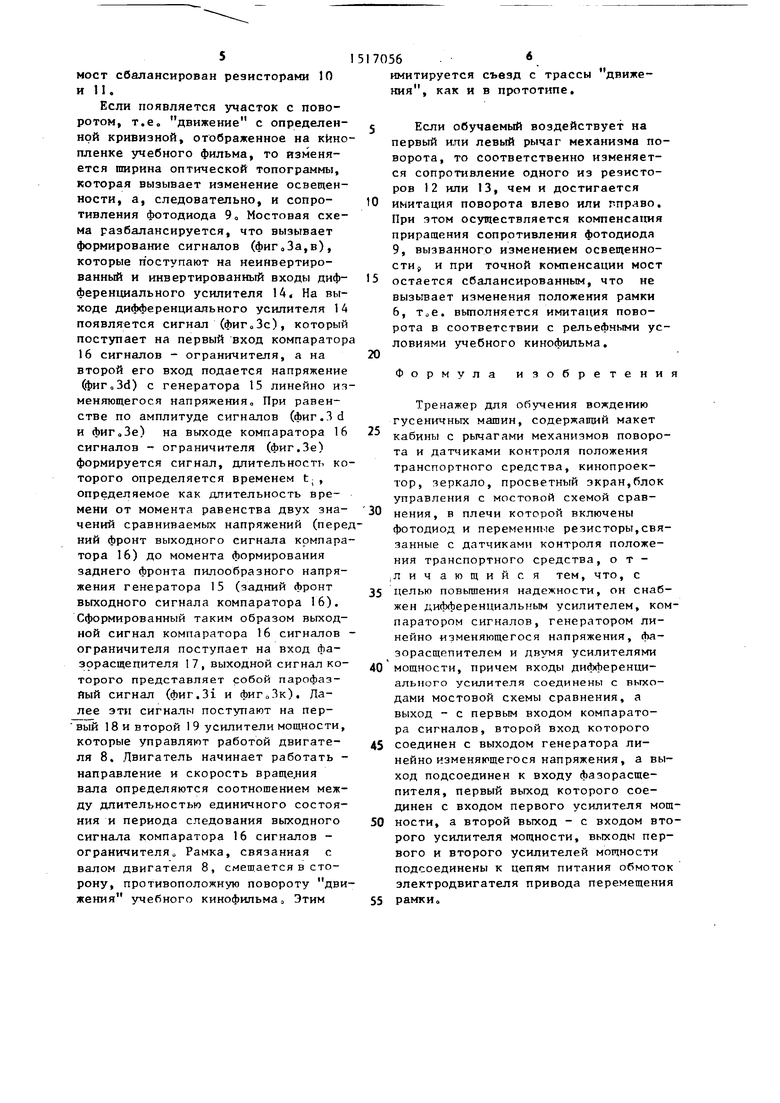
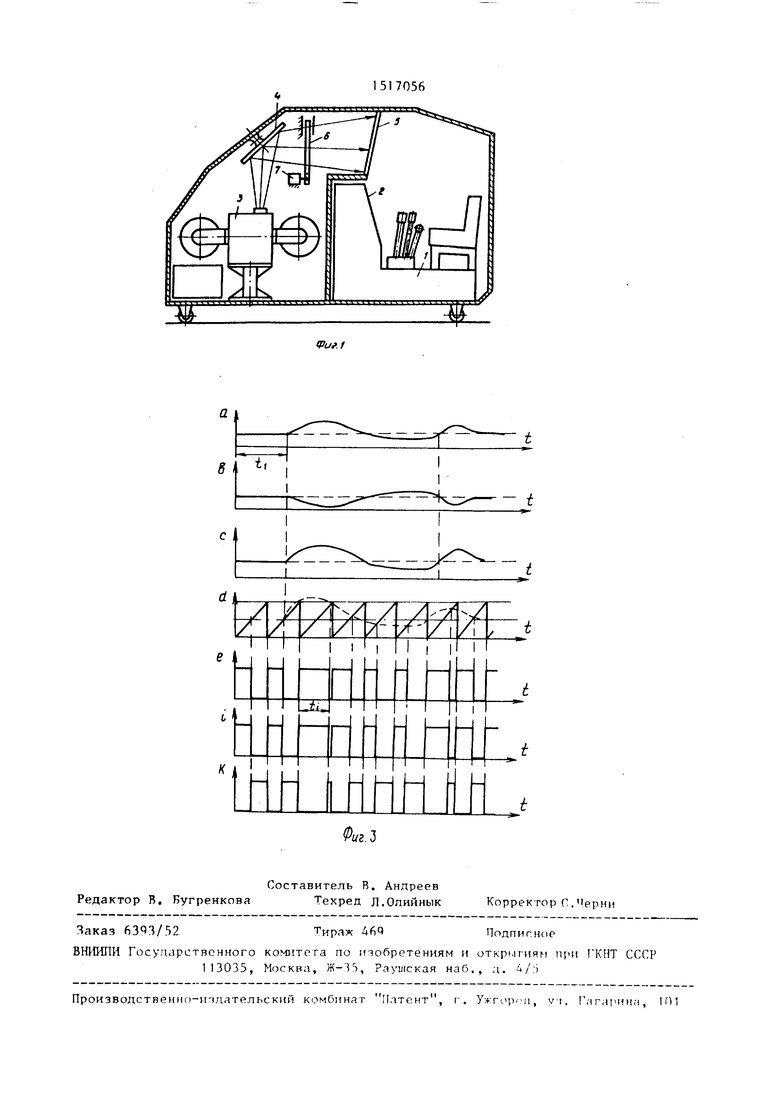
На фиГо 1 схематически изображен тренажер для обучения вождению гусеничных машин; на фиг,2 - электрическая схема привода перемещения рамки; на фиг. 3 - временная диаграмма, поясняющая принцип работы привода перемещения рамки
Тренажер содержит макет кабины 1 с рычагами и датчиками 2 контроля положения транспортного средства, кинопроектор 3, зеркало 4 и просвет- ньш экран 5, между которыми расположена рамка 6 с приводом 7 ее перемещения
На фиг о 2 изображена электриче- кая схема привода 7 перемещения рамки 6, который содержит двигатель 8 и РЛОК управления им, мостовая схема которого состоит из фотодиода 9 и переменных резисторов 10-13, диффе- ренциальньш усилитель 14, генератор 15 линейно изменяющегося напряжения KONmapaTOp 16 сигналов - ограничитель, фазорасщепитель 17, первый 18 и второй 19 усилители мощности, выходами соединенные с цепями питания двигателя.
Резисторы 10 и 11 предназначены для балансировки моста при настройке в реж име нормированной ширины оптической топограммы, соответствующей участку прямолинейного движения.
Резисторы 12 и 13 служат для отображения воздействий на левый или правый рычаг поворота соответственно Изменяя положение рычага от начального значения, изменяется пропорционально и сопротивление соответствующего резистора, что, в свою очередь, компенсирует изменение сопротивления фотодиода 9, пропорциональное освещенности, т.е. ширине оптической топограммы учебного кинофильма о
Дифференциальный усилитель 14 предназначен для усиления напряжения разбалансировки моста, коэффициент усиления которого характеризует степень чувствительности реакции обличаемого на изменение рельефа местность
Генератор 15 линейно изменяющегося напряжения предназначен для формирования пилообразного напряжения, уровень напряжения и частота которого определяют скорость отработки изменения положения рычагов механизма поворота.
Компаратор 16 сигналов - ограниQ читель осуществляет компарирование двух сигналов: выходного сигнала дифференциального усилителя результата компарирования до нормированного уровня срабатьтания фазорасщепителя
5 17, который осуществляет преобразование входного сигнала в парафазный, Усилители 18 и 19 мощности предназначены для усиления широтно модулированных импульсов по мощности
0 Д - уровня, достаточного для управления электродвигателем, и могут- быть реализованы по схеме усилителя с гальванической связью
Тренажер для обучения вождеяию
5 гусеничных машин работает следующим образом
Обучаемый, находясь в макете кабины тренажера, следит за дорожной обстановкой на просветном экQ ране, и, выбирая скорость движения, (задаст скорость движения учебной киноленты, на которой нанесена оптическая топограмма местности„ прямолинейном движении рамка 6 находится в исходном состоянии и ее перемещение зависит от положения рычагов механизмов поворота, -а следовательно, от топограммы местности учебного кинофильма, Тое„ кривизны
„ трассы движения Таким образом, рычаги механизмов поворота совместно с датчиками 2 контроля положения транспортного средства задают исходную информацию, которую отрабатыс вает привод 7 перемещения рамки 6 Рассмотрим принцип и особенности работы привода 7 перемещения рамки 6 кадрового окна в тренажере ,
5
0
Известно, что сопротивление фотодиода 9, включенного в плечо измерительного моста, является функцией его освещенности, а освещенность, в свою очередь, определяется шириной опт1тческой топограммы учебного кинофильма, При движении по прямому участку местности ширина оптической топограммы нормирована и выходной сигнал моста отсутствует,
5
мост сбалансирован резисторами 10 и II.
Если появляется участок с поворотом, т.е. движение с определенной кривизной, отображенное на кинопленке учебного фильма, то изменяется пшрина оптической топограммы, которая вызывает изменение освещенности, а, следовательно, и сопротивления фотодиода 9 о Мостовая схема разбаланснруется, что вызывает формирование сигналов (,в), которые п оступают на неинвертированный и инвертированный входы дифференциального усилителя 14, На выходе дифференциального усилителя 1А появляется сигнал (фиг,,3с), который поступает на первый вход компаратор 16 сигналов - ограничителя, а на второй его вход подается напряжение (фиг„3d) с генератора 15 линейно изменяющегося напряжения. При равенстве по амплитуде сигналов (фиг.3d и фиГаЗе) на выходе компаратора 16 сигналов - ограничителя (фиг.Зе) формируется сигнал, длительность которого определяется временем t; , определяемое как длительность времени от момента равенства двух значений сравниваемых напряжений (пере НИИ фронт выходного сигнала компаратора 16) до момента формирования заднего фронта пилообразного напряжения генератора 15 (задний фронт выходного сигнала компаратора 16). Сформированный таким образом выходной сигнал компаратора 16 сигналов ограничителя поступает на вход фа- зорасщепителя 17, выходной сигнал которого представляет собой парофаз- йый сигнал (фиг.31 и фиГоЗк). Далее эти сигналы поступают на первый 18 и второй 1 9 усилители мощности, которые управляют работой двигателя 8, Двигатель начинает работать - направление и скорость враще.ния вала определяются соотношением между длительностью единичного состояния и периода следования выходного сигнала компаратора 16 сигналов - ограничителя о Рамка, связанная с валом двигателя 8, смещается в сторону, противоположную повороту движения учебного кинофильма Этим
имитируется съезд с трассы движения, как и в прототипе,
5 Если обучаемый воздействует на первый или левый рычаг механизма поворота, то соответственно изменяется сопротивление одного из резисторов 12 или 13, чем и достигается
10 имитация поворота влево или гправо. При этом осуществляется компенсация приращения сопротивления фотодиода 9, вызванного изменением освещенности, и при точной компенсации мост
5 остается сбалансированным, что не вызывает изменения положения рамки 6, . вьтолняется имитация поворота в соответствии с рельефными условиями учебного кинофильма,
20
Формула изобретения
Тренажер для обучения вождению гусеничных машин, содержащий макет кабины с рычагами механизмов поворота и датчиками контроля положения транспортного средства, кинопроектор, зеркало, просветный экран,блок управления с мостовой схемой срав30 нения, в плечи которой включены
фотодиод и переменные резисторы,связанные с датчиками контроля положения транспортного средства, о т - уличающийся тем, что, с
35 целью повышения надежности, он снабжен дифференциальным усилителем, компаратором сигналов, генератором линейно изменяющегося напряжения, фа- зорасщепителем и двумя усилителями
40 мощности, причем входы дифференци- усилителя соединены с выходами мостовой схемы сравнения, а выход - с первым входом компаратора сигналов, второй вход которого
45 соединен с выходом генератора линейно изменяющегося напряжения, а выход подсоединен к входу фазорасще- пителя, первый выход которого соединен с входом первого усилителя мощ50 ности, а второй выход - с входом второго усилителя мощности, выходы первого и второго усилителей мощности подсоединены к цепям питания обмоток электродвигателя привода перемещения
55 рамкио
1517056
