Изобретение относится к горной промышленности, а именно к способам автоматического управления очистными комбайнами в профиле пласта.
Целью изобретения является повышение точности отслеживания нижней границы пласта и повышение надежности работы выемочного комплекса.
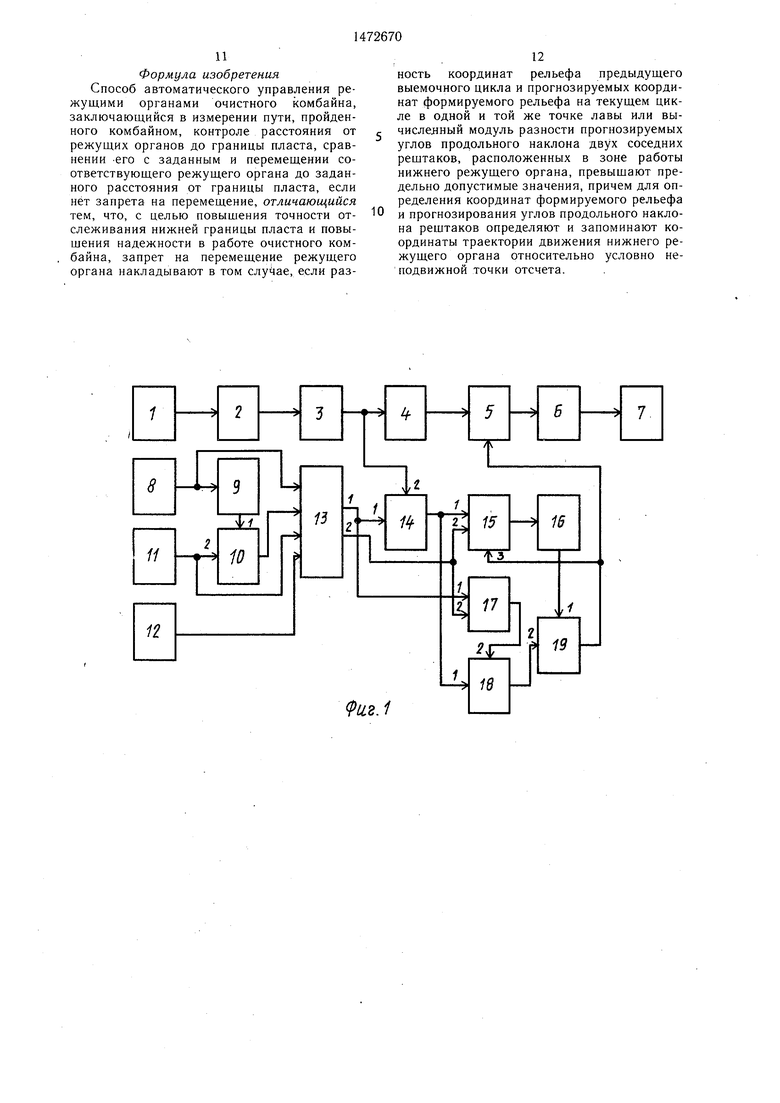
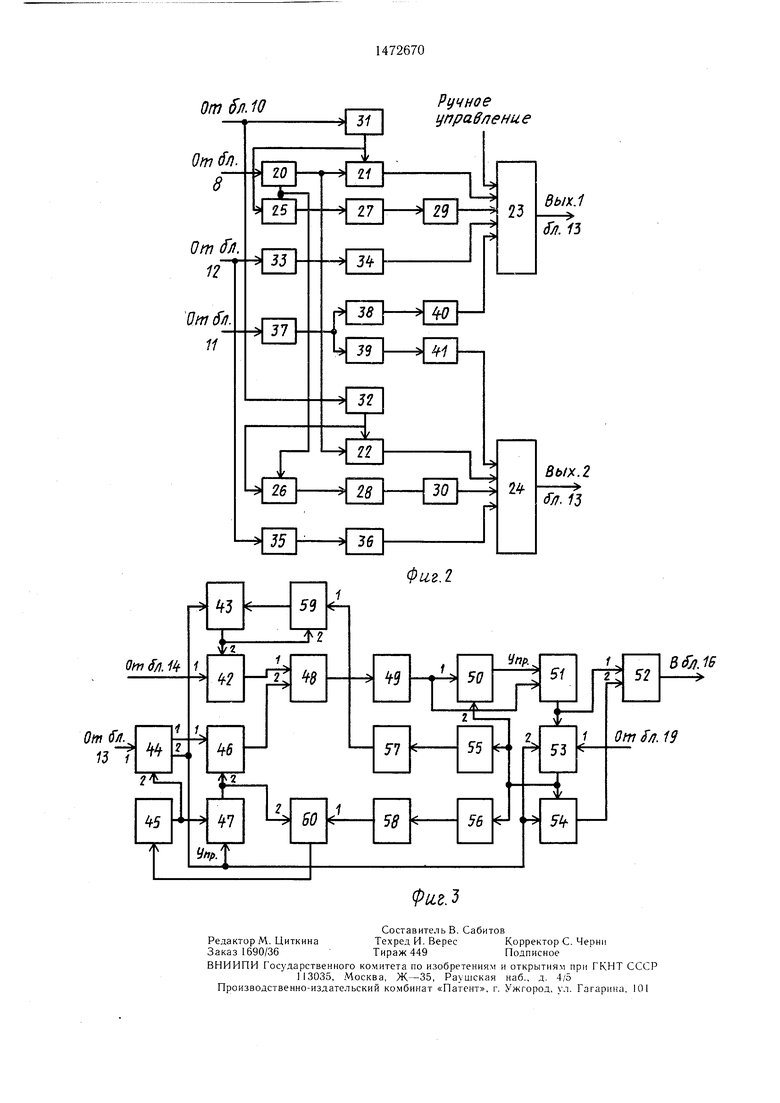
На фиг. 1 представлена структурная схема системы автоматического управления режущими органами очистного комбайна; на фиг. 2 - структурная схема блока преобразования координат; на фиг. 3 - схема блока прогнозирования.
В состав системы управления входят датчик I порода-уголь, выход которого соединен с входом счетчика-накопителя 2, выход которого соединен с входом блока 3 сравнения. Выход блока 3 сравнения соединен с входом блока 4 памяти, выход которого через коммутатор 5 соединен с блоком 6 формирования управляющих сигналов, выход которого соединен с исполнительным механизмом 7. Кроме того, выход датчика 8 пути через счетчик 9 соединен с входом элемента 10 памяти, второй вход которого соединен с выходом датчика 11 угла продольного наклона комбайна. Выходы датчика 8 пути, пройденного комбайном, датчика 11 угла наклона, датчика 12 положения Нижнего режущего органа и элемента 10 памяти соединены с входами блока 13
4 ю
О5
преобразования координат. Первый выход блока 13 соединен с первым входом сумматора 14, второй вход которого соединен с выходом блока 3 сравнения, а выход - с первым входом блока 15 прогнозирования, второй вход которого соединен с вторым выходом блока 13, а выход блока 15 соединен с входом второго блока 16 сравнения. Первый выход блока 13 преобразования координат соединен также с первым входом второго блока 17 памяти, второй вход которого соединен с вторым выходом блока 13 преобразования координат. Выход сумматора 14 соединен с первым входом блока 18 сравнения разности, второй вход которого соединен с выходом блока 17 памяти. Выходы блоков 16 и 18 сравнения соединены соответственно с первым и вторым входами элемента ИЛИ 19, выход которого соединен с третьим входом блока 15 прогнозирования и управляющим входом коммутатора 5.
Структурная схема блока 13 преобразования координат нижнего режущего органа представлена на фиг. 2. В состав блока 13 входит счетчик 20, выход которого соединен через элементы 21, 22 умножения с входами сумматоров 23, 24. Второй выход счетчика 20 через ключи 25, 26, накапливаю- зщие сумматоры 27, 28 и элементы 29, 30 умножения связан с входами сумматоров 23, 24. Информационный вход ключа 25 и второй вход элемента 21 умножения связаны с выходом синусного функционального преобразователя 31. Информационный вход ключа 26 н второй вход элемента 22 ум ноже-, ния связаны с выходом косинусного функционального преобразователя 32. Выход второго синусного функционального преобразователя 33 через соответстующий элемент 34 умножения связан с входом сумматора 23. Выход второго косинусного преобразователя 35 через элемент 36 умножения связан с входом сумматора 24. Выход сумматора 37 соединен с входами третьих синусного 38 и косинусного 39 функциональных преобразователей, выходы которых через соответствующие элементы 40, 41 умножения связаны с входами сумматоров 23, 24 соответственно. Вход счетчика 20 связан с выходом датчика 8 пути (фиг. 1), входы синусного и косинусного функциональных преобразователей 31, 32 соединены с выходом элемента 10 памяти, вход сумматора 37 ;- с выходом датчика 11 угла продольного наклона комбайна, входы синусного 33 и косинусного 35 (фиг. 2) функциональных преобразователей соединены с датчиком 12 положения нижнего режущего органа (фиг. 1). Выходы сумматоров 23 и 24 являются выходами блока 13 преобразования координат.
Структурная схема блока 15 приведена на фиг. 3. Он содержит: элемент 42 вычита
5
0
5
0
5
40
45
50
55
ния, первый вход которого является первым входом блока 15, второй вход элемента 42 вычитания соединен с выходом элемента 43 памяти. Второй вход блока 15 прогнозирования является первым входом элемента 44 сравнения, второй вход которого соединен с выходом элемента 45 памяти, а первый выход элемента 44 сравнения соединен с первым входом элемента 46 вычитания, второй вход которого соединен с выходом элемента 47 памяти, вход которого соединен с выходом элемента 45 памяти. Второй выход элемента 44 сравнения соединён с управляющими входами элементов 43 и 47 памяти. Выходы элементов 42 и 46 вычитания соединены соответственно с первым и вторым входами делителя 48, выход которого соединен с входом функционального преобразователя 49. Выход функционального преобразователя 49 соединен с первым входом элемента 50 сравнения и с входом элемента 51 хранения, управляющий вход которого соединен с выходом элемента сравнения, а выход - с входом элемента 52 вычитания и входом элемента 53 памяти, первый управляющий вход которого является третьим входом блока 15, а выход соединен с входом элемента 54 памяти, выход которого соединен с вторым входом элемента 52 вычитания, а управляющий вход - с втором выходом элемента 44 сравнения и вторым управляющим входом элемента 53 памяти. Выход элемента 53 памяти соединен также с вторым входом элемента 50 сравнения и входами синусного и косинусного функциональных преобразователей 55 и 56 соответственно, выходы которых через соответствующие элементы 57 и 58 умножения соединены с первыми входами сумматоров 59 и 60. Второй вход сумматора 59 соединен с выходом элемента 43 памяти, вход которого соединен с выходом сумматора 59. Второй вход сумматора 60 соединен с выходом элемента 47 памяти, а выход сумматора 60 соединен с входом элемента 45 памяти. Выход элемента вычитания 52 является выходом блока 15 прогнозирования и соединен с входом блока 16 сравнения.
Система для осуществления способа автоматического управления режущими органами очистного комбайна работает следующим образом.
Датчик 1 порода-уголь контролирует расположение нижнего режущего органа относительно границы пласта с боковыми породами, выходной сигнал датчика 1 представляет собой последовательность импульсов, частота которых несет информацию о расстоянии между режущим органом и границей порода-уголь. Эти импульсы пересчитываются за определенное время в счетчике- накопителе 2, сумма поступает в блок 3 сравнения, где сравнивается с уставками, определенными заранее и введенными в блок 3 сравнения, например, в виде кодовых комбинаций. Блок 3 на основании этого сравнения определяет необходимые управляющие воздействия для перемещения режущего органа до достижения необходимого расстояния между органом и границей порода- уголь. Эти сигналы запоминаются в блоке 4 памяти и, кроме того, поступают в сумматор 14.
В это же время сигналы с выходов датчиков 8, 11, 12 и элемента 10 памяти, соответствующие пути, пройденному комбайном, углу продольного наклона его корпуса, положению его нижнего режущего органа и углу продольного наклона комбайна при кратности пройденного пути расстоянию между опорами комбайна, поступают на входы ка 13 преобразования координат. Запись в элемент 10 памяти угла продольного наклона комбайна с выхода датчика 11 производится по сигналу счетчика 9, насчитавще- го количество дискрет пройденного пути, соответствующее межопорному расстоянию комбайна.
В блоке 13 преобразования координат поступившие от датчиков значения преобразуются в горизонтальные и вертикальные координаты нижнего режущего органа относительно условно неподвижной точки отсчета по следующим, рекуррентным зависимостям:
У Уо+1-- 2 sin фф,-)-1А51Пфф/,+
+ lo,,sin(e-f-9)+is..,«a-R «-
2 СОЗфф, + иСО8ффк-)- + lo,,COS(0-|-9)-f Isfosa
е X, у - соответственно горизонтальная и вертикальная координаты нижней образующей точки режущего органа;
. У| - расстояние от верхней полки конвейера до почвы пласта в том из сопряжений лавы со штреком, откуда было начато движение;
1.МОН - длина проекции расстояния между опорами комбайна на его продольную ось;
U - разность пути, пройденного комбайном, и суммы целого числа 1мок, укладывающихся на длине пройденного пути;
фф; - угол гГродольного наклона корпуса комбайна при достижении нуля разностью пройденного пути и суммы целого числа 1мон на длине пройденного пути;
фФк - последний зафиксированный угол
Ion -- расстояние между опорой комбайна, положение которой контролируется (йапример, отстающей), и геомерическим центром опоры
20
25
30
35
40
45
50
поворотного редуктора нижнего режущего органа;
© - угол НаКЛС ;а прямой. СО°ЛИ):: Ющей OiiOpy комбайна, .1аложе ;::г которой контролируется, и геом . i- рический центр опоры редуктора, к продольной ОС15 комбайна; Ф - угол продольного наклона хорпуса
ком.байна;
:а. - угол наклона прямой, соедння о щей гео.метрические центры режущего органа и опоры его поворотного редуктора:
Ц - длина отрезка прямой, соединяющей геометрические центры режущего органа и опоры поворотного редуктора;
R -- радиус ни кнего режущего органа. Блок iS преобразования координат работает следующем образом.
При перемещеннм комбайна на заданное расстояние, например 0,1 м, с выхода датчика 8 пути (фиг. I) приходит импульс и содержимое счетчика 20 (фиг. 2), пропорциональное 1 в зависимостях (1) возрастает и поступает на входы элементов 21, 22 умножения (фиг. 2). На вход синусного и косинусного функциональных преобразователей 31, 32 (фиг. 2) с выхода элемента 10 памяти (фиг. 1) поступает сигнал, пропорциональный величине угла српк, а с их выходом сигналы, пропорционалыцус 51пф{.к и созффк, поступают на зторые входы элементов 21, 22 у.множения. нл выходах которых появляются значения к51Пф()к и исо5ф|.к, поступающие в сумматоры 23, 24. При перемещении комбайна на расстояние, равное 1мои, содержимое счетчика 20 обнуляется, а с его второго выхода на управляющие входы ключей 25, 26 (фиг. 2) поступает открывающий импульс. Через открывшийся ключ 26 с выхода косинусного преобразователя 32 сигнал, пропорциональный coscfOK, поступает на вход накапливающего сумматора 28, где складывается с его содержимым, и сумма остается в сумматоре. На вы ходе сумматора 28 появляется сигx-f
нал, соответствующий cos(n,-. Аналогичi i
но с помощью синусного функционального преобразователя 31, ключа 25 и сумматора 27 на выходе последнего появляется знае-1
чение ,2 51пф}./. В элементах 29, 30 умножения сигналы с выходов сумматоров 27, 28 соответственно умножаются на констапту, соответствующую Ью,,. Таким образом, с выходом элементов 29, 30 умножения на входы сумматоров 23, 24 соответственно поступа55
ют сигналы, соответствующие
X sinq., i-1
i СОЗфф,.
Сигнал с выхода датчика 11 угла продольного наклона комбайна складывается в сумматоре 37 с константой, соответстую- щей углу G (см. выражение (1)). Полученная сумма преобразуется в синусном и косинусном функциональных преобразователях 38, 39 соответственно и умножается в элементах 40, 41 умножения на константу, соответстующую Ьп. Таким образом, на входы сумматоров 23, 24 поступают сигналы, пропорциональные lonsin(e-f ф) и loncos(0+ -f-ф) соответственно. Аналогично с помощью синусного 33 и косинусного 35 функциональных преобразователей и элементов 34, 36 умножения соответственно сигнал, пропорциональный углу наклона а поворотного редуктора нижнего режущего органа, с выхода датчика 12 Преобразуется в сигналы, пропорциональные величинам Usina и Ucosa, которые поступают на входы сумматоров 23, 24 соответственно.
После выполнения всех преобразований на выходе сумматора 23 появляется сигнал, соответствующий значению вертикальной координаты нижнего режущего органа (выход 1 блока 13, фиг. 1), а на выходе сумматора 24 - горизонтальной координаты ор- щгана (выход 2 блока 13, фиг. 1). Значения R и УО, присутстующие в формулах (1), могут вводиться вручную оператором непосредственно на вход сумматора 23.
Значение вертикальной координаты режущего органа поступает в сумматор 4, где суммируется с учетом знаков с определенным в блоке 3 необходимым перемещением режущего органа. Таким образом, с выхода сумматора 14 на первый вход бло- - ка 15 прогнозирования поступает прогнози- румое значение вертикальной координаты нижнего режущего органа при выполнении определенного блоком 3 управляющего воздействия. Па второй вход блока 15 прогнозирования поступает горизонтальная координата режущего органа, которая при управлении не изменяется.
В блоке 15 прогнозирования по известным координатам нижнего режущего органа производится вычисление угла продольного наклона рещтака конвейера при его укладке на сформированный рельеф. При этом исполь зуется выражение
arctg - , при х,х/4-1, (2)
Х| -Xj
е Y/ - угол продольного наклона j-ro рещтака конвейера;
X/ - текущая горизонтальная координата нижней образующей точки нижнего режущего органа (определяется по зависимостям (1);
у, - прогнозируемое значение вертикальной координаты нижней образующей точки нижнего режущего органа при выполнении определен
ного блоком 3 управляющего воздействия;
у/, X,- - вертикальная и горизонтальная координаты начальной точки j-ro рещтака (конечной точки j-ro рещтака);
Х/+1 - горизонтальная координата конечной точки j-ro рещтака. Вертикальная и горизонтальная координаты конечной точки j-ro рещтака (началь- ной точки j + 1-го рещтака) вычисляются по формулам
y,.+ ,-+/p-sin jil I i J
x/+i.x/+ip cosy/J (3)
где IP - длина рещтака конвейера.
5
Блок 15 прогнозирования работает следующим образом.
Горизонтальная координата нижней образующей точки нижнего режущего органа X,, поступивщая на второй вход блока 15, 20 сравнивается в элементе 44 сравнения с прогнозируемой горизонтальной коорди натой конечной точки j-ro рещтака конвейера x/o-i, укладка которого на новую мащинную дорогу прогнозируется в этом месте по длине лавы. Значение х/+| хранится в элементе 45 памяти, откуда и поступает в элемент 44. Если (т. е. точка, где располагается режущий орган, находится в пределах прогнозируемого положения j-ro рещтака), то значение х,- появляется на первом выходе
яд элемента сравнения 44 и поступает в элемент 46 вычитания, где вычисляется разность х,--х; (х/ - горизонтальная координата начальной точки j-ro рещтака - поступает из элемента 47 памяти, где хранится). В элементе 42 вычитания, на входы которого
35 поступает вертикальная координата прогно- зирумого положения нижней точки режущего органа из сумматора 14 и вертикальная координата у, начальной точки j-ro рещтдка из элемента 43 памяти, вычисляется разнось у,-у/. Вычисленные в элемен40 тах 42, 46 вычитания разности поступают в делитель 48, на выходе которого появляется значение , которое поступает в
Х| - X/
функциональный преобразователь 49. Функ- циональный преобразователь 49 построен таким образом, что сигнал на его выходе соответствует арктангенсу входного сигнала, т. е. соответствует значению прогнозируемого угла наклона j-ro рещтака 7/
arcte - - 1- поступает в элемент 50
YY
А;Лу
сравнения, где сравнивается с максимальным значением v/ma., определенным при укладке этого же рещтака для других х,-, у, 55 и хранящимся в элементе 53 памяти формулы (2)).
Если выполняется услвие у/ /тал: то пр.ог- нозируемым углом продольного наклона j-ro
рештака конвейера считается Y/ma, который хранится в элементе 53 памяти, а вычислений 7/ теряется. Если . то на выходе элемента 50 сравнения появляется сигнал, который поступаел на управляющий вход элемента 5 хранения, и значение у/, поступившее на его информационный вход, записывается в него. С выхода элемента 51 хранения значение 7/ поступает в элемент 52 вычитания, куда также поступает значение прогнозируемого угла предыдущего рещта- ка 7/-1 из элемента 54 памяти. Разность Y/-Y/-I. с учетом знаков вычисленная в элементе 52 вычитания, поступает с его выхода в блок 16 сравнения, где ее модуль сравнивается с предельно допустимым значением. Если модуль разности превыщает это значение, сигнал с выхода блока 16 сравнения, поступивший через элемент ИЛИ IS на первый управляющий вход элемента 53 памяти, запрещает запись значения у, в элемент 53 памяти. В противном случае значение 7/ из элемента 51 хранения переписывается в элемент 53 памяти и становится 7;тах. с выхода элемента 53 памяти оно поступает на второй вход элемента 50 сравнения и входы синусного 55 и косинусного 56 функциональных преобразователей. Сигналы с их выходов, пропорциональные sin и COS7/, поступают в элементы 57, 58 умножения, где умножаются на константы, соответствующие IP после чего значения IpSiny/ и lpCOS7/ поступают на первые входы сумматоров 59, 60 соответственно. На вторые входы сумматоров 50, 60 поступают значения у/ и X, из соответствующих элементов 43, 47 памяти. Таким образом, на выходах сумматоров 59, 60 появляются сигналы, соответ- стующие значениям y/+i и x/+i (см. формулы (3)). Значение х/+1 с выхода сумматора 60 записывается в элемент 45 памяти. В начале работы в элементы 43, 47 памяти записываются вертикальная и горизонтальная координаты начального положения нижнего режущего органа. Описанные выше операции в блоке 15 прогнозирования продолжаются до тех пор, пока в элементе 43 сравнения выпоняется условие . Как только при движении комбайна х, станет больщё х,-+| (т. е. необходимо прогнозировать укладку следующего j-j- 1-го рещтака) на втором выходе элемента 44 сравнения появляется сигнал, по которому вычисленные значения и у/+| (координаты начальной точки j--|-l-ro рещтака) с выходов элемента 45 памяти и сумматора 59 записываются в элементы 47 и 43 памяти соответственно. Кроме того, по этому же сигналу ИЗ элемента 53 памяти переписывается в элемент 54 памяти, где будет использоваться как угол продольного наклона предыдущего рештака, а в элемент 53 памяти (для-последующего выбора .максимального угла наклона) записывается значение yi+imax, заведомо меньшее любого вычис0
5
0
5
0
5
0
5
0
5
ленного угла наклона рещтака. После этого весь ранее о 1исанный цикл работы блока 15 прогнозирования повторяется.
Кроме этого, вертикальная и горизонтальная координаты образующей точки нижнего режущего органа с выходов блока 13 преобразования координат поступают в блок 17 памяти, где производится их запоминание и хранение в течение всего выемочного цикла. На следующем выемочном цикле при такой записи координат на выходе блока 17 памяти появляется также значение записанной lia предыдущем цикле вертикальной координаты при совпадении (с допустимой погрешностью) записанной для нее на предыдущем цикле и вновь определенной горизонтальных координат. Таким образом, на входах блока 18 сравнения разности появляются вертикальные координаты нижнего режущего органа: прогнозируемая с учетом введения вычисленного управляющего возде.чствия на нынешнем выемочном цикле (вход 1) и запомненная для той же точки по длине лавы на предыдущем цикле (вход 2).
Блок сравнения разности представляет собой последовательно соединенные элемент вычитания и элемент сравнения. В эле.менте вычитания определяется разность между описанны.ми выше вертикальными коорди- ната.ми рельефа при старом и новом выемочных циклах для одной и той же точки по длине лавы (вычитание производится с учетом знаков). В элементе сравнения эта разность сравнивается с прсдель.чо доп стимым значением (определяемым исходя из условий технологии добычи и записанным ранее в элемент сравнения), и, если разность превышает это значение, на выходе б/;ока 18 сравнения разности появляется сигнал, поступающий на второй вход элемента ИЛИ 19. При появлении на входах элемента ИЛИ 19 .хотя бы одного сигнала с блоков 16 и 18 на его выходе появляется сигнал, закрывающий коммутатор 5 и препятствующий выдаче управляющих воздействий, определенных блоком 3 сравнения по сигналам датчика 1 порода-уголь. Кроме того, сигнал с выхода элемента ИЛИ 19 поступает на третий вход блока 15 прогнозирования.
При наличии сигнала на выходе элемента ИЛИ 19, закрывающего коммутатор 5, перемещение нижнего режущего органа до заданного расстояния от нижней границы пласта не производится. При отсутствии сигнала на выходе элемента ИЛИ 19 коммутатор 5 открыт и нижний режущий орган перемещается до заданного расстояния от нижней границы пласта.
Таким образом осуществляется управление режущими органами очистного комбайна, позволяющее повысить точность отслеживания нижней границы пласта и надежность работы выемочного комплекса.
11
Формула изобретения Способ автоматического управления режущими органами очистного комбайна, заключающийся в измерении пути, пройденного комбайном, контроле расстояния от режущих органов до границы пласта, сравнении -его с заданным и перемещении соответствующего режущего органа до заданного расстояния от границы пласта, если нет запрета на перемещение, отличающийся тем, что, с целью повыщения точности отслеживания нижней границы пласта и повышения надежности в работе очистного комбайна, запрет на перемещение режущего органа накладывают в том случае, если раз12
ность координат рельефа предыдущего выемочного цикла и прогнозируемых координат формируемого рельефа на текущем цикле в одной и той же точке лавы или вы- числелный модуль разности прогнозируемых углов продольного наклона двух соседних рещтаков, расположенных в зоне работы нижнего режущего органа, превыщают предельно допустимые значения, причем для определения координат формируемого рельефа и прогнозирования углов продольного наклона рещтаков определяют и запоминают координаты траектории движения нижнего режущего органа относительно условно неподвижной точки отсчета.


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ОБЪЕКТОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2349937C1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
Изобретение относится к горной промышленности и позволяет повысить точность отслеживания нижней границы пласта и надежность работы выемочного комплекса. Для этого измеряют путь, пройденный комбайном, и расстояние до границ пласта, определяют и запоминают координаты траектории движения нижнего режущего органа /НРО/ относительно условно неподвижной точки отсчета. Перед вводом управления прогнозируют координаты формируемого рельефа. Сравнивают их с координатами рельефа предыдущего выемочного цикла. Одновременно определяют прогнозируемые углы продольного наклона /ПУПН/ рештаков скребкового конвейера при укладке на новую машинную дорогу. Вычисляют разность значений ПУПН рештака, расположенного в зоне работы НРО, после ввода управления и предыдущего рештака. Сравнивают модуль разности ПУПН с предельно допустимым для используемого конвейера значением. Если модуль этой разности или разность вертикальных координат прогнозируемого рельефа на настоящем и предыдущем выемочных циклах в одной и той же точке по длине лавы не превышает предельно допустимых значений, перемещают НРО до заданного расстояния от нижней границы пласта, а если превышают, то НРО не перемещают. 3 ил.
te. /
8
12
Omd/f. 11
От Г 15 f p-t
Составитель в. Сабитов
Редактор М. ЦиткинаТехред И. ВересКорректор С. Черни
Заказ 1690/36Тираж 449Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат «Патент, г. Ужгород, y,i. Гагарина, 101
Ручное
23
Вык.1 ffl. /3
г
2
Вых.2
d/7.l}
Фиг.2
te.3
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Разработка математической модели системы автоматического управления очистными комбайнами на базе микро-ЭВМ | |||
| Заключительный отчет, № Г.Р | |||
| 81084192 | |||
| М.: ИГД им | |||
| А | |||
| А | |||
| Скочинского, 1981, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
