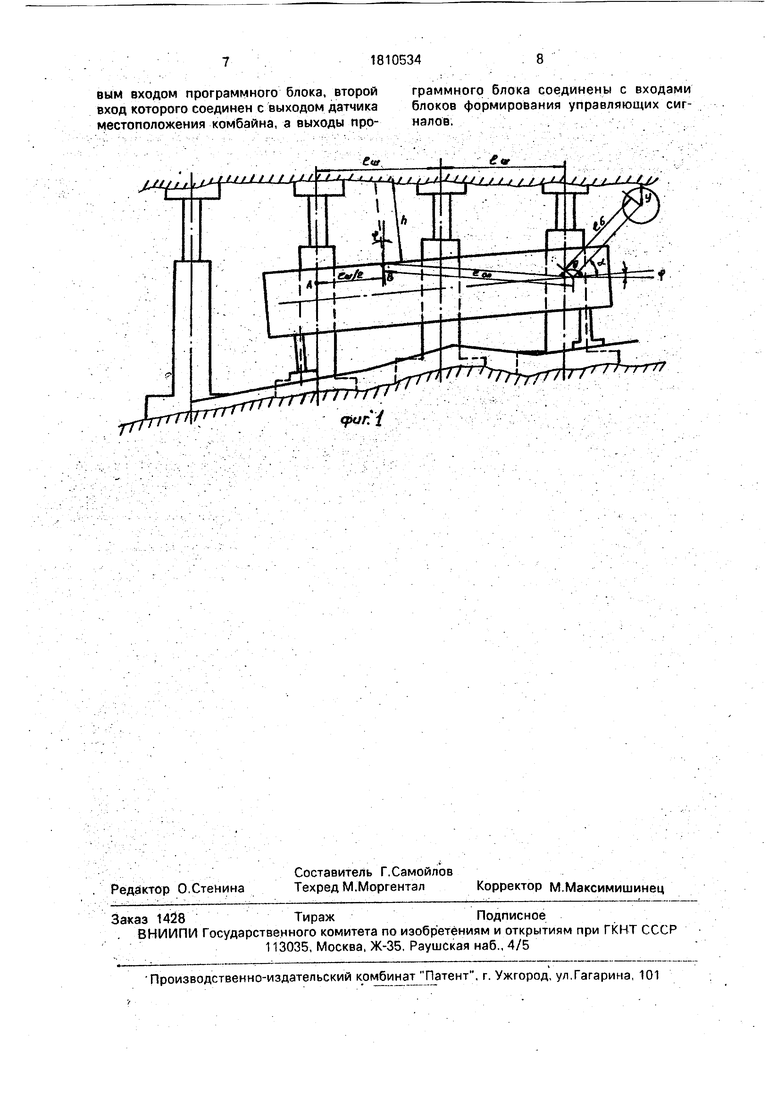
рого сигнал, соответствующий величине sln( в+ р), поступает в блок умножения 7, где умножается на константу, соответствующую Гоп (фиг. 1), С выхода блока 7 умноженный сигнал, соответствующий I0nsin($ + f), поступает на второй вход сумматора 12. Сигнал, соответствующий углу наклона а (фиг.1), характеризующий положение режущего органа, с выхода датчика 8 положения режущего органа поступает на вход синусного преобразователя 9, с выхода которого сигнал, соответствующий sin a , поступает в блок 10 умножения на константу, соответствующую IB (фиг.1). Сигнал, соответствующий величине 1вз1п а, с выхода блока 10 инвертируется в инверторе 11 и полученный сигнал соответствующий величине - iBsin а, подается на третий вход сумматора 12.
Сумматор 12 осуществляет сложение сигналов, поступающих на его входы, в результате чего на его выходе появляется сигнал, пропорциональный вертикальной координате - Y - режущего органа, вычисленной в соответствии с формулой (1). Этот сигнал поступает на вход программного блока 13,:
Датчик местоположения комбайна 14 контролирует момент начала прохождения фиксированной точки комбайна (точка А. фиг.1 мимо забойной стойки крепи. В этот момент сигнал с выхода датчика местоположения комбайна 14 поступает на второй вход программного блока 13. При задании программы вертикальные координаты режущего органа запоминаются в программном блоке, а при отработке программы текущие вертикальные координаты с выхо- да сумматора 12 по сигналам датчика местоположения комбайна 14 сравниваются с заданными (запомненными) и полученное рассогласование передается в блоки формирования управляющих сигналов для перемещения режущего органа вверх (блок 15) или вниз (блок 16). Блоки формирования управляющих сигналов 15 и 16 преобразуют полученные значения в сигналы, которые приводят в действие исполнительные элементы 17 и 18, соответственно, перемещающие режущий орган на требуемое расстояние в требуемом направлении.
В качестве блока измерения расстояния 1 может быть использован, например, акустический уровнемер ЭХО-3 ТУ-25.020045- 80, установленный на комбайне в точке В (фиг.1), В качестве датчиков угла продольного наклона корпуса комбайна и положения режущего органа могут использоваться, например, потенциометрическиё датчики угла
наклона, разработанные институтом Авто- матгормаш. Датчик местоположения комбайна 14 может быть реализован, например, последовательным соединением акустиче- 5 ского уровнемера ЭХО-3 ТУ 25-02.020045-80 и блока сравнения, которые фиксируют наличие препятствия на заданном расстоянии от завального борта комбайна, В качестве блоков формирования управляющих сигна0 лов могут быть использованы, например, од- новибраторы, В качестве исполнительных элементов может использоваться, например, электрогидропривод очистного комбайна. В качестве примера реализации
5 программного блока 13 может быть использован, например, блок 1 основной программы (а.с, СССР № 972089). Блоки и датчики предлагаемой системы программного управления могут быть реализованы на интег0 ральных микросхемамх 157, 140, 176, 561, 580 серий, диодах и транзисторах в типовом включении..
Фор мула и зоб ре т е н и я Система программного управления очи- 5 стным комбайном в профиле калийного пласта, содержащая датчик угла продольного наклона корпуса, комбайна, датчик положения режущего органа, блоки формирования управляющих сигналов, выходы которых со0 единены с входами исполнительных элементов, о т л ичающаяся тем, что. с целью повышения надежности и точности управления за счет исключения накопления погрешности управления и трудоемких операций,
5 она снабжена блоком измерения расстоя-. ния, датчиком местоположения комбайна, двумя сумматорами, двумя синусными и одним косинусным функциональными преобразователями, тремя блоками умножения,
0 инвертором и программным блоком, причем выход датчика угла продольного наклона корпуса комбайна соединен с входами косинусного преобразователя и первого сумматора, выход которого соединен с входом
5 первого синусного преобразователя, выход которого соединен с входом первого блока умножения, выход которого соединён с вторым входом второго сумматора, выход бло-- ка измерения расстояния соединен с
0 первым входом второго блрка умножения, второй вход которого соединен с выходом косинусного преобразователя, а выход - с первым входом второго сумматора, выход датчика положения режущего органа соеди 5 нен с входом второго синусного преобразователя, выход которого соединен с входом третьего блока умножения, выход которого, соединен с входом инвертора, выход которого соединен с третьим входом второго сумматора, выход которого соединек с первым входом программного блока, второйграммного блока соединены с входами вход которого соединен с выходом датчикаблоков формирования управляющих сиг- местоположения комбайна, а выходы про-налов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Способ автоматической дуговой сварки и устройство для его осуществления (его варианты) | 1984 |
|
SU1235682A1 |