25 27 Z6 23
фиеЛ
Изобретение относится к робототехнике и может быть использовано в качестве захватного устройства адаптивного робота, предназначенного для выполнения сборочных и других операций.
Целью изобретения является повышение надежности работы.
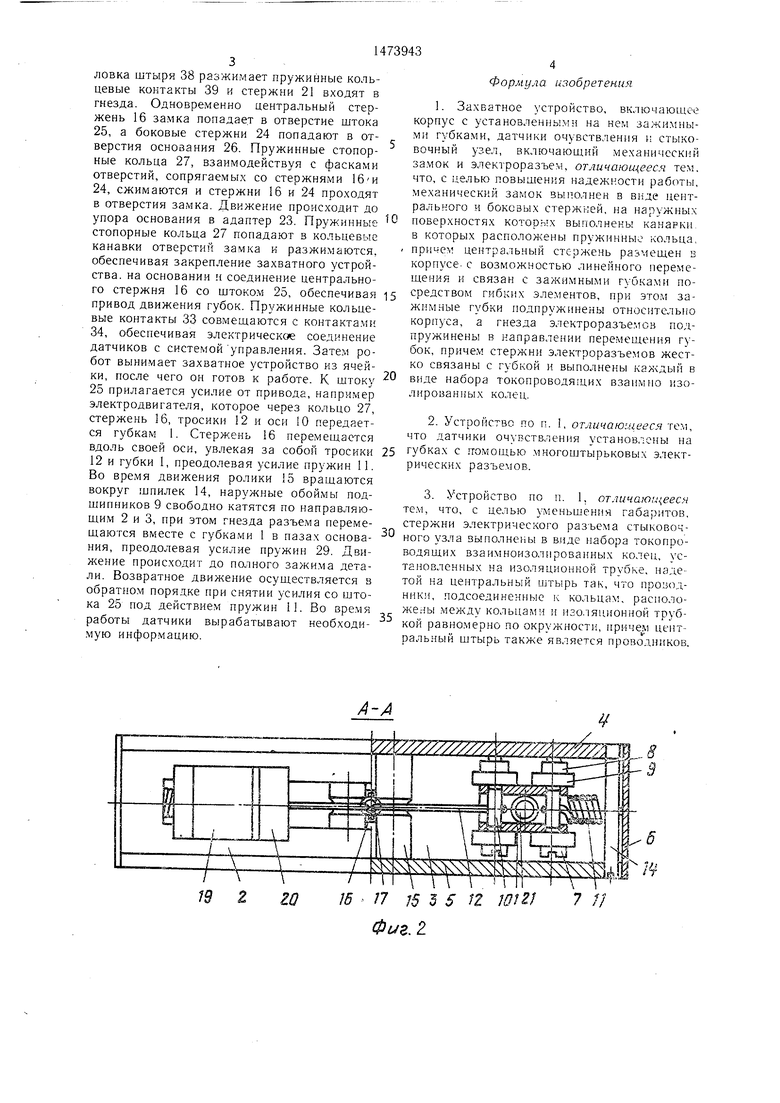
На фиг. 1 показано захватное устройство промышленного робота, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - захватное устройство, вид сбоку; на фиг. 4 - стержень электрического разъема.
Захватное устройство содержит губки 1, верхнюю 2, в которой выполнен паз для перемещения губок, и нижнюю 3 направляю10
ки робота. На всех стержнях замка выполнены кольцевые канавки, в которые установлены пружинные стопорные кольца 27, которые сопрягаются с аналогичными канавками в отверстиях основания 26 руки робота и штока 25. Стержни 21 электрического разъема сопрягаются с гнездами электроразъема, корпусы 28 которых подпружине- ны в направлении сходимости губок пружинами 29, для удержания их в крайнем положении во время смены схвата, и установлены в пазах основания 26 с возможностью его перемещения на величину сходимости губок. В корпусе 28 гнезда запрессованы изолирующие втулки 30-32, в расточке каждой из
щие планки, боковые стенки 4 и 5, крышки 6, 15 которых, кроме втулки 30, установлены пру- образующие корпус. На губках 1 при помощи винтов 7, служащих одновременно осями, и гаек 8 жестко закреплены внутренние обоймы шарикоподшипников 9. В губки запрессованы оси 10, к которым прикрепле- „ ны возвратные пружины 11, приводные гибкие элементы-тросики 12. Боковые стенки 4 и 5 жестко прикреплены к направляющим винтам с потайной головкой 13, которые установлены в отверстия с раззенковкой и прожинные кольцевые контакты 33, к которым подсоединены электрические проводники, пропущенные через отверстия во втулках, расположенные равномерно по окружности. Во втулке 30 выполнена фаска для обеспечения хорошей собираемости разъема. Стержень 21 выполнен из набора электрических контактов 34 в виде металлических колец, к которым подсоединены проводники 35, выполненные из полос тонкой металлической
рези с разделанными кромками, выполнен- 25 фольги, каждое из которых напрессовано на ные на наружных сторонах боковых стенок изолирующую втулку 36, а последние в свою
очередь напрессованы на изоляционную труб30
35
40
4 и 5 для возможности регулировки расстояния между направляющими. На боковой стенке 4 при помощи резьбового соединения установлены шпильки 14, к которым крепятся пружины 11 и устанавливаются ролики 15. В боковой стенке 5 выполнены отверстия, в которые устанавливаются шпильки 14. Крышки 6 жестко прикреплены к направляющим. Тросики 12, переброшенные через ролики 15, жестко закреплены на центральном стержне 16 замка при помощи хомута 17. На губках 1 винтами 18 жестко закреплены корпуса многоштырьковых электрических разъемов 19 для смены датчиков внешней информации. На разъемах установлены датчики 20. Стержень 21 электрического разъема замка при помощи резьбового соединения прикреплен к губке 1, в теле которой выполнено сквозное отверстие, где проходят электрические проводники, соединяющие стержень 21 и разъем 19. К нижней направляющей 3 вин- тами 22 прикреплен адаптер 23 с отверстием, в которое установлен центральный стержень 16 замка, а боковые стержни 24 замка жестко закреплены на адаптере 23 при помощи резьбового соединения. Центральный стержень 16 имеет бурт, сопрягающийся с от- 50 верстием в адаптере 23, который упирается в нижнюю направляющую 3 при максимально раздвинутых губках и в стенку адаптера при максимально сжатых губках, ограничивая передвижение центрального стержня и губок. Центральный стержень 16 замка сопрягается с отверстием в приводном звене - штоке 25, а боковые стержни 24 замка сопрягаются с отверстиями в основании 26 руку 37, одетую на центральный металлический штырь 38, также служащий проводником. Втулки 36 напрессованы на изолирующую трубку 37 таким образом, что проводники из фольги находятся между втулками и трубкой и расположены равномерно по окружности. Центральный штырь 38 с одной стороны выполнен со сферической головкой, а с другой стороны на него напрессована втулка 39, резьбовая втулка 40 и подсоединен электрический провод. Во втулках 39 и 40 равномерно по окружности выполнены отверстия для прохода проводов, подсоединенных к проводникам 35.
Захватное устройство работает следующим образом.
В исходном положении устройство находится в технологической ячейке, например присаособлении, губки 1 максимально раздвинуты, что обеспечивается действием возвратных пружин 11. На штеккерные разъемы установлены датчики необходимой информации. Датчики могут быть как одно- компонентные для получения какого-либо одного вида информации, так и многокомпонентные для получения нескольких видов информации одновременно, притом для одного захватного устройства может быть разработана целая гамма сменных датчиков. Основание руки робота позиционируется соосно стержням замка и ему сообщается линейное 55 перемещение вдоль оси замка. Стержни 21 электрического разъема попадают в отверстия гнезд, которые удерживаются в крайнем положении пружинами 29, сферическая го
ки робота. На всех стержнях замка выполнены кольцевые канавки, в которые установлены пружинные стопорные кольца 27, которые сопрягаются с аналогичными канавками в отверстиях основания 26 руки робота и штока 25. Стержни 21 электрического разъема сопрягаются с гнездами электроразъема, корпусы 28 которых подпружине- ны в направлении сходимости губок пружинами 29, для удержания их в крайнем положении во время смены схвата, и установлены в пазах основания 26 с возможностью его перемещения на величину сходимости губок. В корпусе 28 гнезда запрессованы изолирующие втулки 30-32, в расточке каждой из
которых, кроме втулки 30, установлены пру-
жинные кольцевые контакты 33, к которым подсоединены электрические проводники, пропущенные через отверстия во втулках, расположенные равномерно по окружности. Во втулке 30 выполнена фаска для обеспечения хорошей собираемости разъема. Стержень 21 выполнен из набора электрических контактов 34 в виде металлических колец, к которым подсоединены проводники 35, выполненные из полос тонкой металлической
0
5
0
0
ку 37, одетую на центральный металлический штырь 38, также служащий проводником. Втулки 36 напрессованы на изолирующую трубку 37 таким образом, что проводники из фольги находятся между втулками и трубкой и расположены равномерно по окружности. Центральный штырь 38 с одной стороны выполнен со сферической головкой, а с другой стороны на него напрессована втулка 39, резьбовая втулка 40 и подсоединен электрический провод. Во втулках 39 и 40 равномерно по окружности выполнены отверстия для прохода проводов, подсоединенных к проводникам 35.
Захватное устройство работает следующим образом.
В исходном положении устройство находится в технологической ячейке, например присаособлении, губки 1 максимально раздвинуты, что обеспечивается действием возвратных пружин 11. На штеккерные разъемы установлены датчики необходимой информации. Датчики могут быть как одно- компонентные для получения какого-либо одного вида информации, так и многокомпонентные для получения нескольких видов информации одновременно, притом для одного захватного устройства может быть разработана целая гамма сменных датчиков. Основание руки робота позиционируется соосно стержням замка и ему сообщается линейное 5 перемещение вдоль оси замка. Стержни 21 электрического разъема попадают в отверстия гнезд, которые удерживаются в крайнем положении пружинами 29, сферическая го5
10
ловка штыря 38 разжимает пружинные кольцевые контакты 39 и стержни 21 входят в гнезда. Одновременно центральный стержень 16 замка попадает в отверстие штока 25, а боковые стержни 24 попадают в отверстия основания 26. Пружинные стопорные кольца 27, взаимодействуя с фасками отверстий, сопрягаемых со стержнями 16 И 24, сжимаются и стержни 16 и 24 проходят в отверстия замка. Движение происходит до упора основания в адаптер 23. Пружинные стопорные кольца 27 попадают в кольцевые канавки отверстий замка и разжимаются, обеспечивая закрепление захватного устройства, на основании н соединение центрального стержня 16 со штоком 25, обеспечивая 15 привод движения губок. Пружинные кольцевые контакты 33 совмещаются с контактами 34, обеспечивая электрическое соединение датчиков с системой управления. Затем робот вынимает захватное устройство из ячейки, после чего он готов к работе. К штоку 25 прилагается усилие от привода, например электродвигателя, которое через кольцо 27, стержень 16, тросики 12 и оси 10 передается губкам 1. Стержень 16 перемещается
Формула изобретения
. Захватное устройство, включающее корпус с установленными на нем зажимными губками, датчики очувствления н стыковочный узел, включающий механический замок и электроразъем, отличающееся тем, что, с целью повышения надежности работы, механический замок выполнен в виде центрального и боковых стержней, на нарчжных поверхностях которых выполнены канарки в которых расположены пружинные кольца, примем центральный стержень размещен Б корпусе с возможностью линейного перемещения и связан с зажимными губками посредством гибких элементов, при этом зажимные губки подпружинены относительно корпуса, а гнезда электроразъемсв подпружинены в направлении перемещения губок, причем стержни электроразъемов жестко связаны с губкой и выполнены каждый в виде набора токопроводящих взаимно изолированных колец.
2. Устройство по п. , отличающееся тем, что датчики очувствления установлены на
30
вдоль своей оси, увлекая за собой тросики 25 губках с помощью многоштырьковых элект- 12 и губки 1, преодолевая усилие пружин 11. Во время движения ролики 15 вращаются вокруг шпилек 14, наружные обоймы подшипников 9 свободно катятся по направляющим 2 и 3, при этом гнезда разъема перемещаются вместе с губками 1 в пазах основания, преодолевая усилие пружин 29. Движение происходит до полного зажима детали. Возвратное движение осуществляется в обратном порядке при снятии усилия со штока 25 под действием пружин 11. Во время работы датчики вырабатывают необходимую информацию.
35
рических разъемов.
3. Устройство по п. 1, отличающееся тем, что, с целью уменьшения габаритов, стержни электрического разъема стыковочного узла выполнены в виде набора токопроводящих взаим неизолированных колец, установленных на изоляционной трубке, наде той на центральный штырь так, что про:ю i- ники, подсоединенные к кольцам, расположены между кольцами н изоляционной трубкой равномерно по окружности, причем центральный штырь также является проводников.
5
Формула изобретения
. Захватное устройство, включающее корпус с установленными на нем зажимными губками, датчики очувствления н стыковочный узел, включающий механический замок и электроразъем, отличающееся тем, что, с целью повышения надежности работы, механический замок выполнен в виде центрального и боковых стержней, на нарчжных поверхностях которых выполнены канарки в которых расположены пружинные кольца, примем центральный стержень размещен Б корпусе с возможностью линейного перемещения и связан с зажимными губками посредством гибких элементов, при этом зажимные губки подпружинены относительно корпуса, а гнезда электроразъемсв подпружинены в направлении перемещения губок, причем стержни электроразъемов жестко связаны с губкой и выполнены каждый в виде набора токопроводящих взаимно изолированных колец.
2. Устройство по п. , отличающееся тем, что датчики очувствления установлены на
губках с помощью многоштырьковых элект-
рических разъемов.
3. Устройство по п. 1, отличающееся тем, что, с целью уменьшения габаритов, стержни электрического разъема стыковочного узла выполнены в виде набора токопроводящих взаим неизолированных колец, установленных на изоляционной трубке, наде той на центральный штырь так, что про:ю i- ники, подсоединенные к кольцам, расположены между кольцами н изоляционной трубкой равномерно по окружности, причем центральный штырь также является проводников.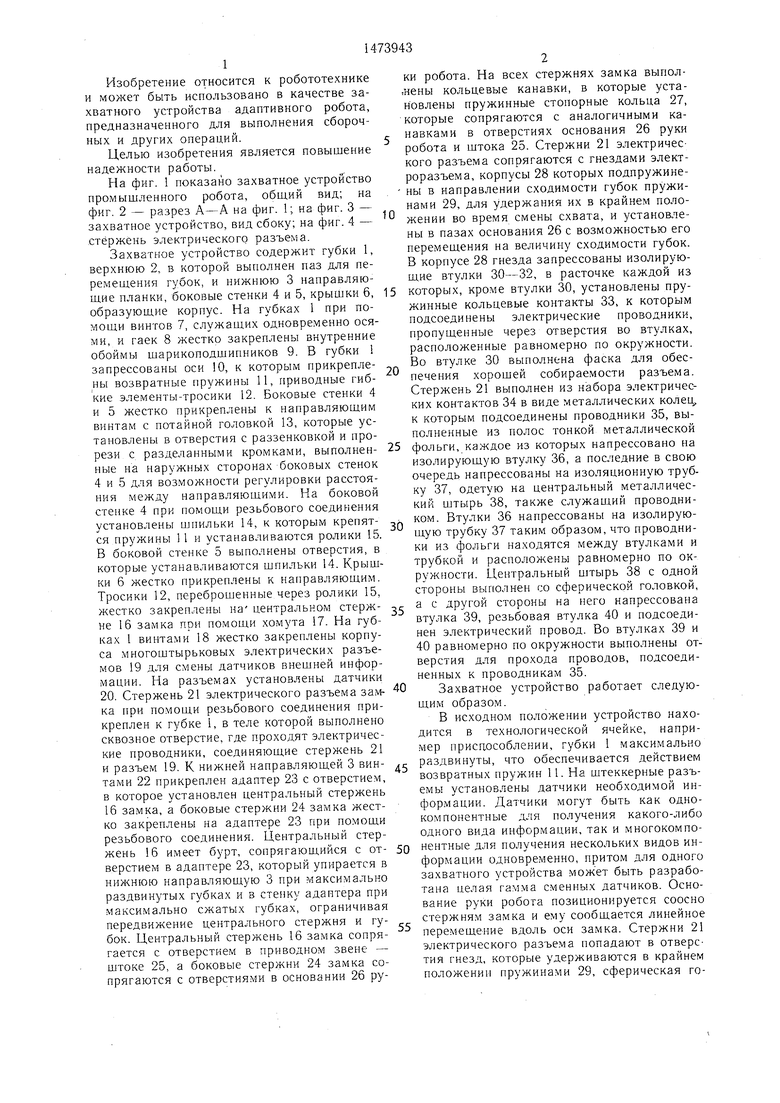
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Устройство для стыковки сменного инструмента с рукой промышленного робота | 1985 |
|
SU1315305A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| ПУСКОВАЯ УСТАНОВКА | 2009 |
|
RU2406961C1 |
| ШЕЙНЫЙ РАЗЪЕМ ВОДОЛАЗНОГО СКАФАНДРА | 2003 |
|
RU2239580C1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
Изобретение относится к робототехнике и может быть использовано в качестве захватного устройства адаптивного робота, предназначенного для выполнения сборочных и других операций. Целью изобретения является повышение надежности работы. В исходном положении устройство находится в технологической ячейке. Основание руки позиционируется соосно со стержнями замка и перемещается вдоль оси замка. Стержни 21 электрического разъема попадают в отверстия гнезд. Центральный стержень 16 замка попадает в отверстие штока 25, а боковые стержни - в отверстия основания и фиксируются пружинными кольцами 27. Пружинные кольцевые контакты 33 совмещаются с контактами электроразъема, обеспечивая электрическое соединение датчиков с системой управления, после чего робот извлекает устройство из ячейки. К штоку 25 прилагается усилие от привода, которое посредством кольца 27, стержня 16 и тросиков 12 передается губкам, вызывая их перемещение. 4 ил.
w г го
А-А
I гп у
/5-77 15 5 S К Iff & Фиг. 2.
7 11
18
6
35
-J7
34
