Изобретение относится к робототехнике и может быть использовано в качестве захватного устройства адаптивного робота, предназначенного для выполнения сборочных операций, в частности установки деталей типа резисторов, конденсаторов на монтажную плату
Цель изобретения - расширение Т1эх- нологических возможностей.
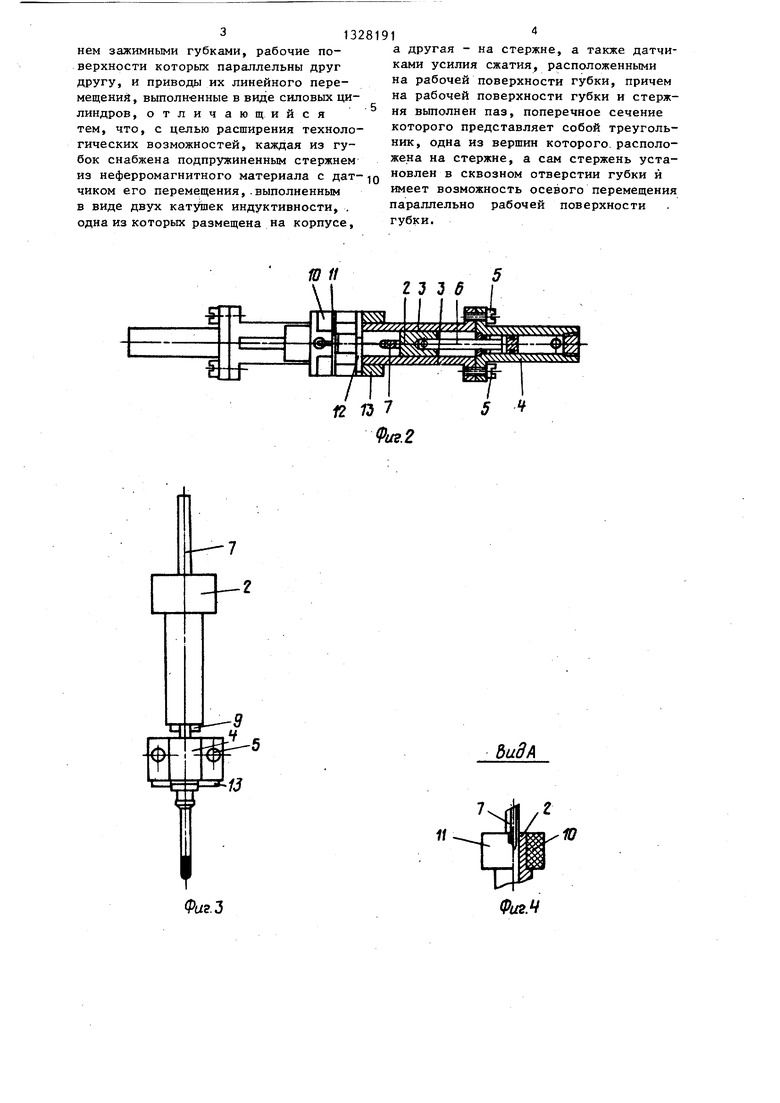
На фиг. 1 изображен схват манипулятора, общий вид; на фиг, 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - вид А на фиг.1; на
фиг. 5 - губка, вариант вьтолнения (стержень утоплен).
Схват содержит корпус 1, губки 2, которые установлены в направляющих планках 3, силовые цилиндры 4, прикрепленные к направляющим планкам винтами 5, штоки 6 силовых цилиндров соединены с губками. В каждой губке выполнено сквозное отверстие, в котором установлен стержень 7, подпружиненный пружиной 8, упирающейся на гайку 9, Стержень выполнен с -плос- копараллельными гранями, которые сопрягаются с пазами направляющих планок для предотвращения поворота стержней вокруг своей оси.
В каждой губке со стороны раб-очей поверхности и стержне выполнен паз, поперечное сечение которого представ ляет собой-треугольник, одна из его вершин лежит на стержне, а на самой рабочей поверхности губки расположены датчики 10 усилий сжатия, выполненные в виде сенсорного модуля, к которым прикреплена пластина 11 с прорезью. Схват снабжен датчиками перемещения стержней, которые представляют собой две катушки индуктивности (не показаны), одна из них размещена на корпусе, а другая на стержне. Корпус датчика перемещения (не показан) прикреплен к направляющим планкам винтом 12 через адаптер 13 и в нем установлены вторичные катушки индуктивности.
Схват работает следующим образом.
В исходном положении губки схвата максимально раздвинуты, что обеспечивается подачей рабочей среды в полость обратного хода силовых цилиндров 4. В рабочую полость подают, например, сжатый воздух и одновременно выпускают его из полости обратного хода. Штоки 6 воздействуют на губки которые перемещаются в направляющих
планках 3. Стержни 7, перемешаясь вместе с губками, своими плоскопараллельными гранями скользят в пазах направляющих планок. Выводы детали попадают в прорези пластины 11 и частично ориентируются. Губки продолжают сжиматься, выводы деталей сначала попадают в пазы губок, продолжая ориентироваться, а затем в пазы стержней 7, взаимодействуя с которьми деталь получает окончательную ориентацию, затем корпус детали упирается в пластины 11. Возникающее усилие зажима передается через пластину на датчики 10, которые вырабатывают сигнал о наличии детали и усилиии зажима. Как только усилие зажима достигает порогового, прекращается подача рабочей среды в полости силовых цилиндров.
На выполнения сборочных операций спозиционированный роботом схват вместе с зажатой деталью начи- нает совершать плоскопараллельное относительно своей оси симметрии движение вперед. Выводы детали попадают в отверстия сопрягаемой с ней монтажной платы, схват с деталью продолжает движение, а стержни 7, упираясь в монтажную плату и-преодолевая усилие пружины 8, начинают смещаться относительно схвата, своими плоскопараллельными гранями скользя в пазах направляющих планок 3. Закрепленные на концах стержней 7 катушки перемещаются относительно вторичных катушек, вырабатывающих сигнал о перемещении детали относительно монтажной платы. По достижении необходимой величины перемещения движение схвата вперед прекращается.
На окончательном этапе работы воздух из рабочих полостей силовых цилиндров 4 стравливается, в результате чего происходит разжим детали. Схват перемещается назад, удаляясь от платы со смонтированной на ней деталью. Пружины 8 перемещают стержни 7 в исходное положение. Затем подается рабочая среда в полость обратного хода силовых цилиндров 4. Штоки 6 силовых цилиндров перемещаются, увлекая за собой губки. После чего схват готов к дальнейшей работе.
Формула изобретен и я
Схват промьшшенного робота, содержащий корпус с установленными на
нем зажимными губками, рабочие поверхности которых параллельны друг другу, и приводы их линейного перемещения , выполн-енные в виде силовых цилиндров, отличающийся тем, что, с целью расширения технологических возможностей, каждая из губок снабжена подпружиненным стержнем из неферромагнитного материала с датчиком его перемещения,.выполненным в виде двух катушек индуктивности, . одна из которых размещена на корпусе.
а другая - на стержне, а также датчиками усилия сжатия, расположенными на рабочей поверхности губки, причем на рабочей поверхности губки и стержня вьтолнен паз, поперечное сечение которого представляет собой треугольник, одна из вершин которого, расположена на стержне, а сам стержень установлен в сквозном отверстии губки и имеет возможность осевого перемещения параллельно рабочей поверхности губки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Схват | 1984 |
|
SU1177153A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват робота | 1984 |
|
SU1253771A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |

Изобретение относится к области роббтотехники и может быть использовано в качестве захватного устройства адаптивного робота, предназначенного для вьшолнения сборочных операций, в частности установки деталей типа резисторов, конденсаторов на монтажную плату. Цель изобретения состоит в расширении технологических воз.можностей за счет применения датчиков усилия сжатия подпружиненных стержней с пазами для ориентации деталей и датчиков перемещения стержней. Схват содержит корпус 1, зажимные губки 2, направляющие планки 3, силовые цилиндры 4, винты 5, штоки цилиндров 6, стержни с пазами 7, пружины 8, гайки 9, датчики усилия сжатия 10, пласт ины 11, винты 12, адаптер 13. 5 ил. (Л
дидА
Фи.3
ФигМ
Редактор М. Бланар
Составитель С. Грибов Техред Л.Сердюкоаа
Заказ 3437/20 Тираж 952Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 5
Корректор А, Зимокосов
| Схват манипулятора | 1977 |
|
SU623734A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
