Изобретение относится к машиностроению, а именно к промышленным роботам-, и может быть использовано для автоматизации сборочного производства.
Целью изобретения является упрощение конструкции и повышение надежности за счет сокращения количества движений, необходимых для стыковки . и расширения технологических возможностей за счет использования сменного инструмента с электроприводом,
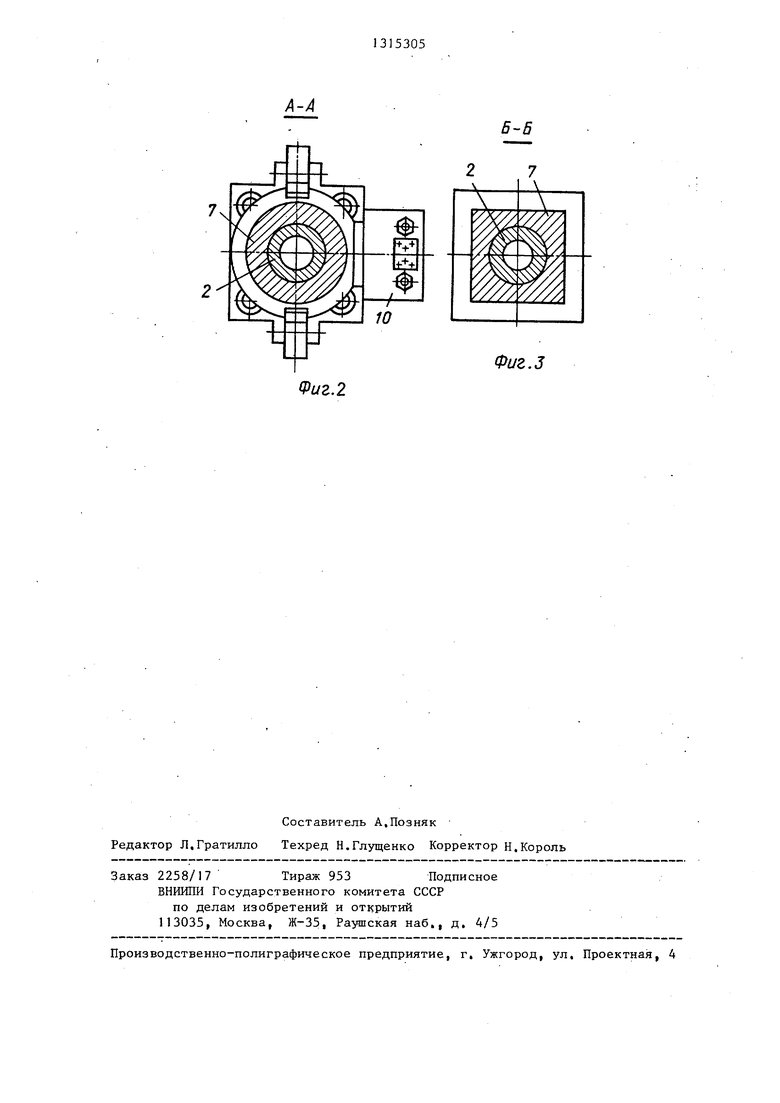
На фиг,1 изображено устройство для стыковки сменного инструмента с рукой промышленного робота, общий вкд} на фиг.2 - разрез А-А на фиг, 1 ; на фиг,3 - разрез Б-Б на фиг,1.
Устройство состоит из корпуса 1, жестко связанного с фланцем кисти руки промышленного робота (не показано), имеющего посадочный штырь 2, у основания которого установлено уплотнительное кольцо 3, по обе стороны корпуса 1 симметрично установлены два рычага 4, подпружиненных плоскими пружинами 5, В месте стыковки корпуса 1 с фланцем имеется кольцевая проточка, в которую установлено уплотнительное кольцо 6,
Во втулке 7, соединянемой со сменным инструментом, установлены уплотнитель 8 и компенсатор 9,
На посадочной втулке 7 установлен угольник 10, на котором крепится колодка 11 электроразъема, играющая также роль фиксатора.
Устройство для стыковки сменного инструмента с рукой промышленного робота работает следующим образом.
Рычаги 4, перемещаясь по конической поверхности втулки 7, отжимают плоские пружины 5, при переходе на обратный конус пружины 5 плотно при- J жимают рычаги 4 к конической поверхности втулки 7, что обеспечивает надежное соединение.
Расстыковка узла происходит в об™ JO ратном порядке,.Сменный инструмент устанавливается в гнездо магазина1 Во втулке 7 сделана проточка для установки в магазин. При движении руки робота в обратном направлении ры- 15 чаги 4 отжимают пружины 5 и посадочный штырь 2 корпуса 1 выходит из гнезда посадочной втулки 7.
Формула изобретения
20
1, Устройство для стыковки сменного инструмента с рукой промьш1ленного робота, содержащее корпус с посадоч- ньпч штырем, расположенную на этом
25 штыре втулку и по меньшей мере два захватных элемента, отличающееся тем, что, с целью упрощения конструкции и повышения надежности за счет сокращения количества
30 движений, необходимых для стыковки, захватные элементы .выполнены в виде рычагов, подпружиненных относительно корпуса, а наружная поверхность втулки выполнена в виде двустороннего
j конуса, конусные поверхности которого предназначены для взаимодействия с рычагами, кроме того, внутри втулки смонтированы уплотнения для герметизации соответственно сменного
Рука промьш1ленного робота устанав- 40 инструмента с втулкой и втулки с поливается напротив торца сменного садочным штырем корпуса, при этом инструмента, расположенного в мага- на корпусе и втулке дополнительно зине. При движении руки вперед поса- установлены колодки разъема, имеющие дочный штырь 2 корпуса 1 входит- в соответственно отверстия и направляю- отверстие втулки 7,и, дойдя до упора, 45 штыри, прижимает компенсатор 9,
У основания посадочного штыря 2 в проточке .расположено уплотнительное кольцо 3, которое прижимается торцом посадочной втулки 7 и вместе с ком- 50
2, Устройство по п,, отличающееся тем, что, с целью расширения технологических возможностей за счет использования сменного инструмента с электроприводом, колодка, имеющая отверстия, связана с дополнительным источником злектро- знергии.
пёнсатором 9, уплотнением 8, уплот- нительным кольцом 6 обеспечивает герметичность внутреннего канала для подвода рабочей среды.
.
13153052
Рычаги 4, перемещаясь по конической поверхности втулки 7, отжимают плоские пружины 5, при переходе на обратный конус пружины 5 плотно при- J жимают рычаги 4 к конической поверхности втулки 7, что обеспечивает надежное соединение.
Расстыковка узла происходит в об™ ратном порядке,.Сменный инструмент устанавливается в гнездо магазина1 Во втулке 7 сделана проточка для установки в магазин. При движении руки робота в обратном направлении ры- чаги 4 отжимают пружины 5 и посадочный штырь 2 корпуса 1 выходит из гнезда посадочной втулки 7.
Формула изобретения
1, Устройство для стыковки сменного инструмента с рукой промьш1ленного робота, содержащее корпус с посадоч- ньпч штырем, расположенную на этом
штыре втулку и по меньшей мере два захватных элемента, отличающееся тем, что, с целью упрощения конструкции и повышения надежности за счет сокращения количества
движений, необходимых для стыковки, захватные элементы .выполнены в виде рычагов, подпружиненных относительно . корпуса, а наружная поверхность втулки выполнена в виде двустороннего
конуса, конусные поверхности которого предназначены для взаимодействия с рычагами, кроме того, внутри втулки смонтированы уплотнения для гер2, Устройство по п,, отличающееся тем, что, с целью расширения технологических возможностей за счет использования сменного инструмента с электроприводом, колодка, имеющая отверстия, связана с дополнительным источником злектро- знергии.
Фиг.З
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Стыковочное устройство | 1990 |
|
SU1785894A1 |
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1283101A1 |
| Стыковочное устройство | 1975 |
|
SU543513A1 |
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1273242A1 |
| Устройство автоматической смены захватов промышленных роботов | 1991 |
|
SU1808697A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Устройство автоматической смены инструмента | 1981 |
|
SU1007907A1 |
| Шпиндельный узел металлорежущего станка | 1985 |
|
SU1284732A1 |
| Устройство автоматической смены инструмента манипулятора | 1988 |
|
SU1583286A1 |

| Устройство для стыковки сменного инструмента с кистью исполнительного органа манипулятора | 1977 |
|
SU715318A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
