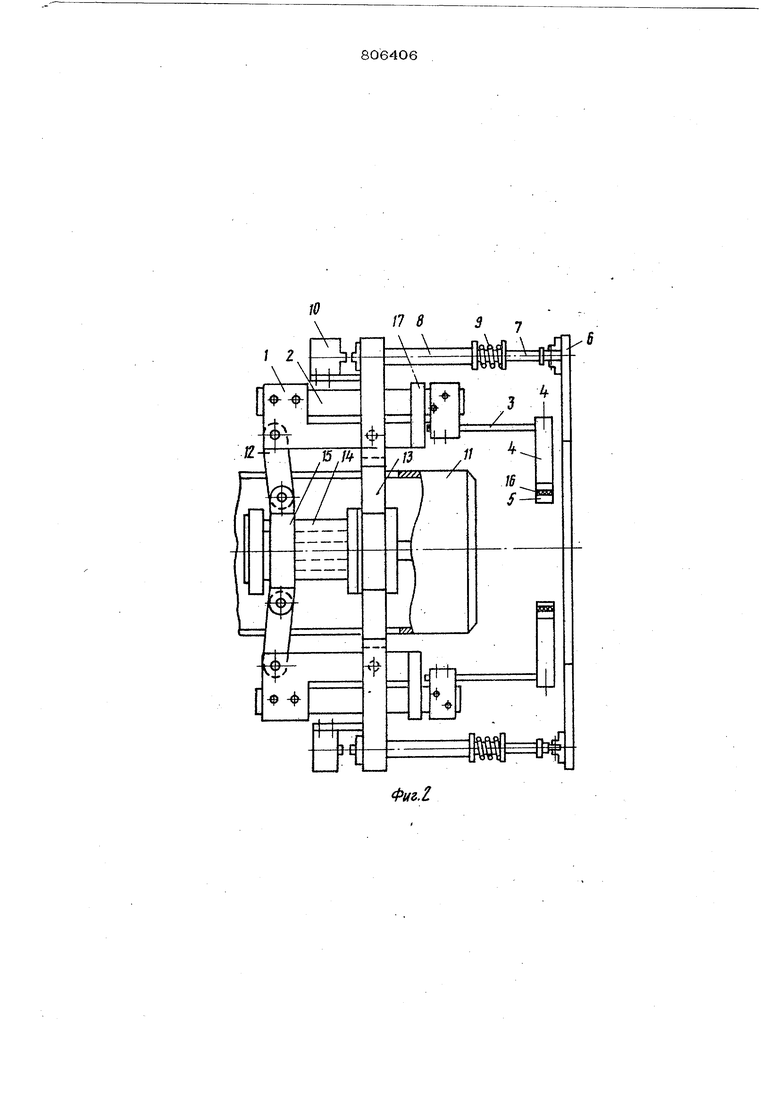
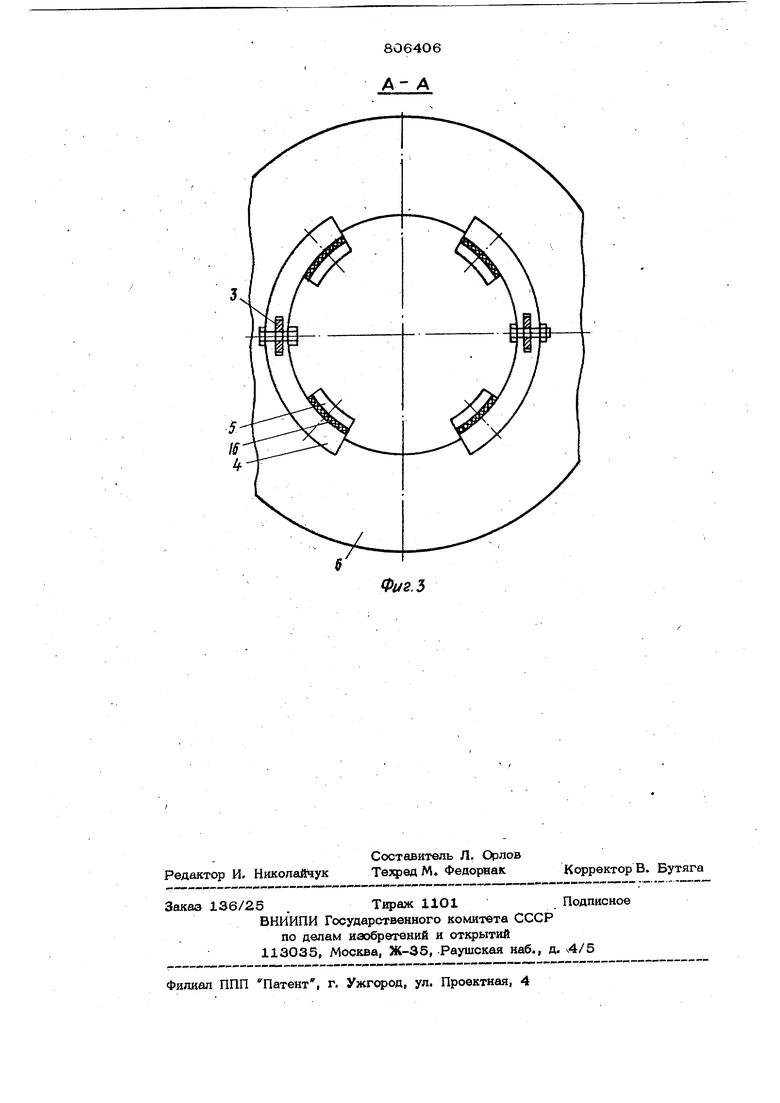
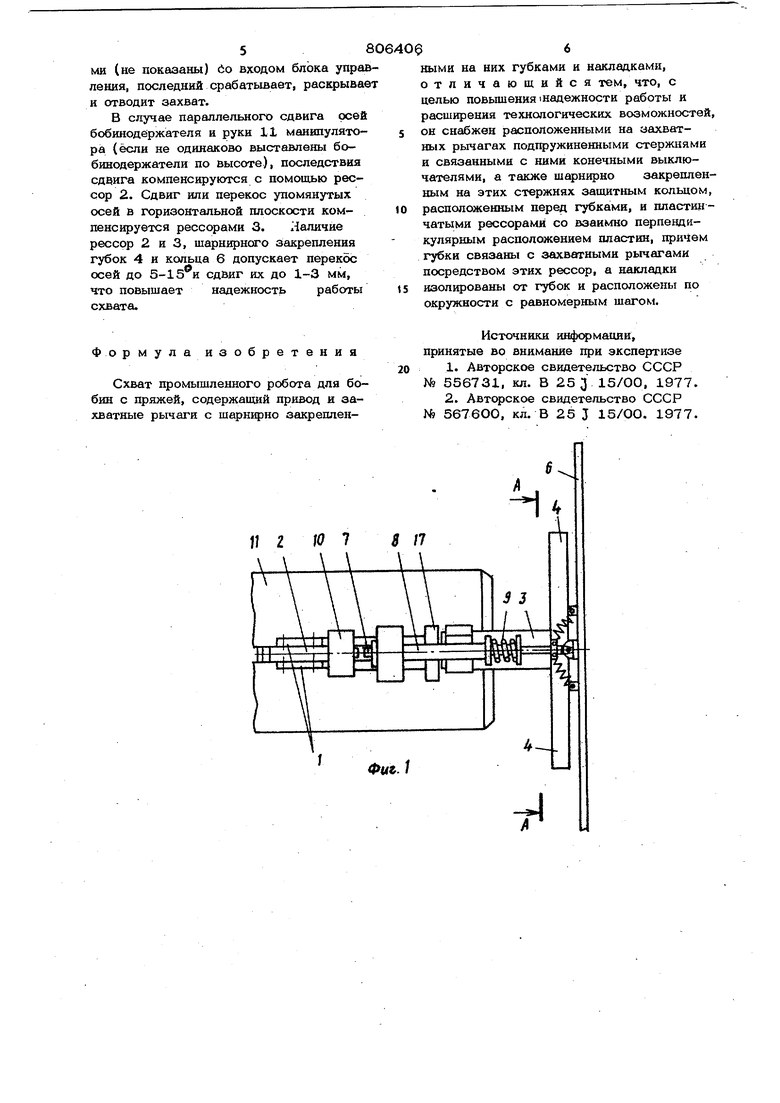
Изобретение относится к роботах-, кике и может быть применено для оснащения промышленного робота, предназначенного, например, для съема бобин с пряжей весом до 2О кг с формовочно намоточных машин ПН2-1ОООКР18 и перегрузки их на транспортное устрой ство. Известен захват механической руки, содержащий три зажимных элемента и щэивод их перемещения, смонтированные в корпусе захвата и связанные меж ду собой зубчатой передачей. Два зажимны элемента выполнены в виде установленных с возможностью вращения и снабженных зубчатыми секторами рычагов, а третий зажимный элемент выпопнен в виде установленной с возможностью поступательного перемещения зубчатой рейки. В корпусе захвата имее ся окно, размеры которого больще попе ных размеров зажимаемой детали. Известный захват обеспечивает одинаковое перемещение всех трех зажимных элементов к центру зажимаемой детали, а вследствие упругих свойств сильфонов происходит самоустановление торца детали по трем основным точкам базовой плоскости натрона станка j.l. Однако при съеме текстолитовых бобкн с пряжей искусственного волокна весом до 2О кг захват за пряжу исключается из-за легкого повреждения ее формы, обусловленного низким коэффициентом трения материала пряжи. Удержать тяжелую бобину за ее свободный от 15)яжи выступающий конец не представляется возмсякным, поскольку длина его колеблется от 15 до ЗО мм в зависимости от износа текстолитовой бобины. Поэтому наиболее приемлемый вариант - перетягивание бобины с пряжей с шшандрического бобинодержателя на шшиндрическую руку манипулятора. Однако в этом случае из-за необходимости расположения большинства деталей на самой руке, сильно увеличиваются габариты узла захват-рука .манипулятора. Наличие сильфонов и плиты усложняет устройство, а выступающие детали при подводе захвата повреждают пряжу. Кроме того, аахват не чувствует отсутствия бобины и может вместо бобины захватить металлический бобннодержатель, что создает аварийную ситуацию. Наиболее близким к предлагаемому является захват промьишлэнного робота, содержащий связанные с кистью робота захватные рычаги с подвижно закрепленными на них губками, прыгаем .на захватных рычагах выполнены продольные направляющие пазы, в которых установлены подпрудсиненные ползуны с закрепле1шыми на 1шх осями, а губки установлены на этих осях с возможностью вращения и подпрунсинены относительно ползунов |j2J. Известный зах.ват обладает возможностью самоустановки, однако использовать его для захвата бобины с пряжей не представляется возможным в связи с тем, что он не захватывает бобину с пряжей, так как свободный от-пряжи конец бобины имеет длину всего 15-30 м Кроме того, своими выступаюпшми частями захват деформирует и повреждает пряжу, а также не чувствует отсутств бобины и захватывает бобинодержатель, что может привести к аварии. Цель изобретения - повыщение надеж ности работы а расширение технологических возможностей. Для достижения поставленной цели аахват снабжен расположенными на захватных рычагах подпружиненными стерж нями и связанными с ними конеч10з1ми выключателями, а также шарнирно закрепленным на этих штырях защитным кольцом, расположегшым перед губками, и пластинчатыми рессорами со взаимно перпендикулярным расположением -пла стин, причем губки связаны с захватными рычагами посредством этих рессор), а накладки изолированы от губок и расположены по окруяаюсти с равномерным шагом, - На фиг, 1 изображен схват в закрытом состоянии, вид спереди; на фиг. 2 то же, вид сверху/ на фиг, 3 - вид А-Л на фиг. 1, Захватные рычаги 1, рессоры 2 и 3, губки 4 с электрически язолировшшыми накладками S, защитное кольцо 6 со штырями 7, узлами 8 крепления штырей вружинами 9 и конечными т 1ключателями 1О расположены снаружи цилиндрической руки 11 манипулятора, имеющей прорези вдоль образующей на противоположных сторонах, в которые проходят концы рычагов 12 и проущин 13. Механизм перемещения захвата вдоль руки 11 (пара вш1т-гайка) расположен внутри руки 11 (не показан.). Механизм раскрытия захвата также расположен внутри руки 11 и состоит из пары винтгайка 14 и 15, подвижного рычага 12 и проушины 13, на концах которых, прошедших через боковые прорези руки 11, шарнирно закреплены захватные рычаги 1. К рычагу 1 неподвижно закреплен . один конец рессоры 2, к концу которой прикреплен ;конец второй рессоры 3. К другому концу рессоры 3 шарнирно прикреплена губка 4 с накладкой 5, изолированной от губки прокладкой 16, Защитное Кольцов установлено на штырях 7. Штыри 7 установле1а 1 с возможностью возвратно-поступательного движения в узлах 8 и подпружинены пружинами 9. Конечные выключатели 10 расположены у концов штырей 7. Деформация рессор 2 ограничена упорами 17. Устройство работает следующим образом. Раскрытый захват подводится к торцу бобинодержателя, на котором расположена бобина с пряжей, и надвигается на свободный от пряжи конец бобины до упора защитного кольца 6 в пряжу и срабатывания конечных выключателей 1О, В этот момент радиальный зазор между накладками 5 и свободным от пряжи концом текстолитовой бобины равен 3-10 мм. Затем захват закрывается, что обеспечивает вращение винта 14, перемещением гайки 15, рычагов 12 и 1, рессор 2 и 3 и губок 4. Поскольку накладки 5 расположены по окрулшости с равномерным щагом, деформация свободного от пряжи конца бобины сведена к минимуму и заклинивание бобины на бобинодержателе при захвате исключено. После срабатывания захвата включается привод стягивания (не показан) и бобина с пряжей перетягивается с боб шодержателя на циливдрическую ру- , ку 11 манипулятора, В случае захвата .бобинодержателя, на котором отсутствует текстолитовая бобина, либо при недостылке захвата или срыве захвата при зафиксированной бобине накладки 5 касаются металлического бобинодержателя, соединенного с корпусом машины. Поскольку накладки 5 электрически изолированы от губок 4 прокладками 16 и соединены проводниками (не показаны) йо входом блока управления, последний срабатывает, раскрывает и отводит захват.
В случае параллельного сдвига осей бобинодёржателя и руки 11 манипулятора (если не одинаково выставлены бобинодержатели по высоте), последствия сдвига компенсируются с помощью рессор 2. Сдвиг или перекос упомянутых осей в горизонтальной плоскости компенсируется рессорами 3. Наличие рессор 2 и 3, шарнирного закрепления губок 4 и кольца 6 допускает перекос осей до 5-15 и сдЬиг их до 1-3 мм, что повышает надежность работы схвата.
Формулаиаобретения
Схват промышленного робота для бобин с пряжей, содержащий привод и захватные рычаги с шарнирно закрепленными на них губками и накладками, отличающийся тем, что, с целью повышения надежности работы и расширения технологических возможностей,
он снабжен расположенными на захватных рычагах подпружиненными стержнями и связанными с ними конечными выключателями, а также шарнирно закрепленным на этих стержнях защитным кольцом,
расположенным перед губками, и пластинчатыми рессорами со взаимно перпендикулярным расположением пластин, причем губки связаны с захватными рычагами посредством этих рессор, а накладки
изолированы от губок и расположены по окружности с равномерным шагом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N9 556731, кл. В 25;) 15/00, 1977.
2. Авторское свидетельство СССР М 5676ОО, кл. В 25 J 15/ОО. 1977.
Ю
17 8
3 7
А - А
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU812566A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Захватное устройство | 1987 |
|
SU1489983A2 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1975 |
|
SU527286A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |