1
Изобретение относится к транспортным, средствам, в частности к системам управления механизмом поворота гусеничных машин.
Цель изобретения - упрощение конструкции и повышение надежности работы механизма поворота.
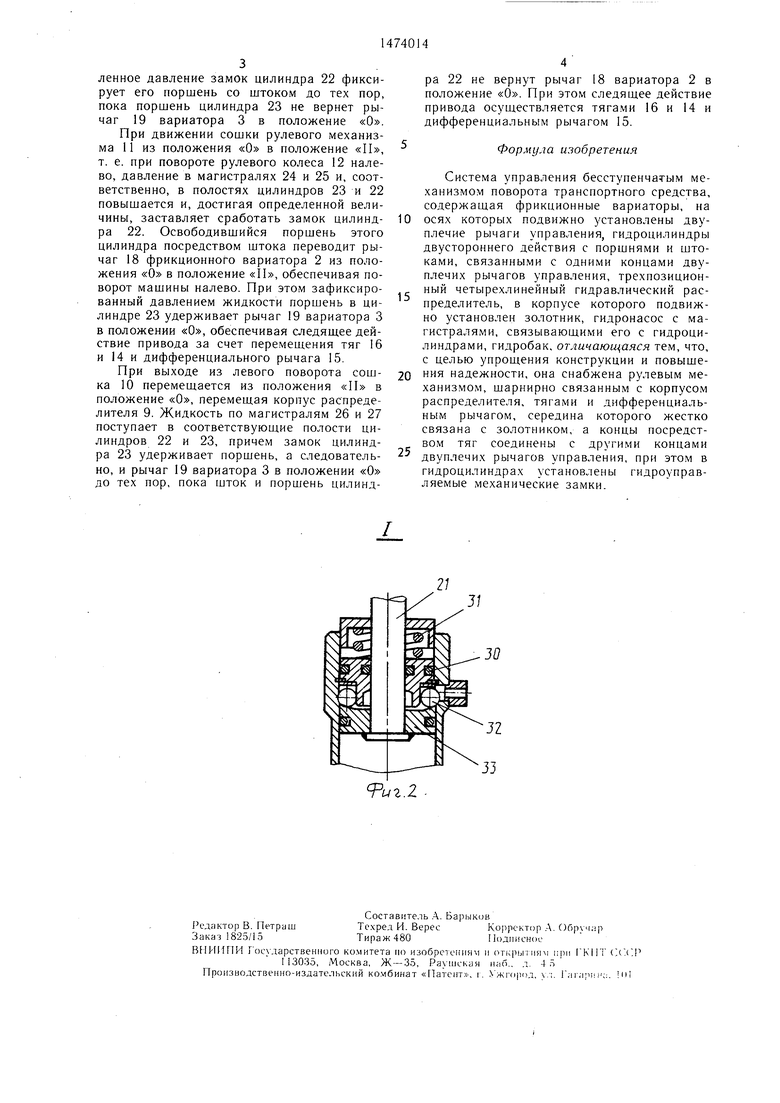
На фиг. 1 представлена кинематическая схема системы управления бесступенчатым механизмом поворота транспортного средства; на фиг. 2 - узел 1 на ф,иг. 1.
Механизм 1 поворота транспортного средства содержит два фрикционных вариатора 2 и 3, передающие крутящий момент по бортам машины на движители 4 и 5. Система управления механизмом поворота содержит насос 6 с предохранительным клапаном 7, соединенный магистралью 8 с четырехлинейным трехпозиционным распределителем 9, корпус которого прикреплен к сошке 10 рулевого механизма 11, управляемого рулевым колесом 12. Золотник 13 распределителя скреплен тягой 14 с серединой дифференциального рычага 15, концы которого соединены тягами 16 и 17 с одними концами двуплечих рычагов 18 и 19 управления фрикционными вариаторайи 2 и 3. Другие концы рычагов 18 и 19 соединены со штоками 20 и 21 гидроцилиндров 22 и 23 двустороннего действия, снабженных механическими замками.
Один из питающих выходов распределителя 9 соединен через магистрали 24 и 25 с штоковой полостью гидроцилиндра 22 и через магистраль 24 с поршневой полостью гидроцилиндра 23. Друго й питающий выход распределителя 9 соединен магистралью 26 с поршневой полостью гидроцилиндра 22 и магистралями 26 и 27 с штоковой полостью гидроцилиндра 23. Сливной выход распределителя соединен магистралью 28 с гидробаком 29. Механический замок гидроцилиндра содержит замыкающий поршень 30 (фиг. 2), поджатый пружиной 31 и имеющий хвостовик, распирающий шарики 32, расположенные в отверстиях поршня 33, приводящего в движение шток 21, и в канавке, выполненной в стенке гидроцилиндра.
Система управления работает следующим
образом.
В случае прямолинейного движения золотник 13 распределителя 9 находится в нейтральном положении и жидкость от насоса 6 по магистрали 8 через проточки золотника 13 поступает по магистралям 26 и 24 в полости цилиндров, а по магистрали 28 сливается в бак 29.
При повороте рулевого колеса 12 направо сошка 10 из положения «О перемещается в положение «I, двигая корпус рас5 пределителя 9 и смещая его вместе с присоединенными к нему концами магистралей 8, 28 и 26, 24 относительного нейтрального положения золотника 13. Жидкость по магистралям 26 и 27 поступает соответственно в поршневую и штоковую полости гид0 роцилиндров 22 и 23. Под давлением жидкости замыкающий поршень 30 гидроцилиндра 23, сжимая пружину 31, перемещается и освобождает шарики 32, находящиеся в канавке корпуса гидроцилиндра Поршень 33
5 получает возможность двигаться и посредством штока 21 перемещает рычаг 19 фрикционного вариатора 3 из положения «О в положение «1, обеспечивая поворот машины направо. При этом зафиксированный давлением жидкости в цилиндре 22 поршень
0 удерживает рычаг 18 вариатора 2 в положении «О, обеспечивая следящее действие, привода путем перестановки золотника 13 в нейтральное положение за счет перемещения тяг 17 и 14 и дифференциального рычага 15.
5 При вращении рулевого колеса в обратном направлении сошка 10 перемещается из положения «1 в положение «О, переключая распределитель, и жидкость по магистралям 24 и 25 поступает в штоковую полость цилиндра 22 в поршневую полость
0
цилиндра 23. Отрегулированный на опречеленное давление замок цилиндра 22 фиксирует его поршень со штоком до тех пор, пока поршень цилиндра 23 не вернет рычаг 19 вариатора 3 в положение «О При движении сошки рулевого механизма 11 из положения «О в положение «II, т. е. при повороте рулевого колеса 12 налево, давление в магистралях 24 и 25 и, соответственно, в полостях цилиндров 23 и 22 повышается и, достигая определенной велира 22 не вернут рычаг 18 вариатора 2 в положение «О При этом следящее действие привода осуществляется тягами 16 и 14 и дифференциальным рычагом 15
Формула изобретения
Система управления бесступенчатым механизмом поворота транспортного средства, содержащая фрикционные вариаторы, на
чины, заставляет сработать замок цилинд- 10 осях которых подвижно установлены двура 22. Освободившийся поршень этого цилиндра посредством штока переводит рычаг 18 фрикционного вариатора 2 из положения «О в положение «II, обеспечивая поворот машины налево При этом зафиксированный давлением жидкости поршень в цилиндре 23 удерживает рычаг 19 вариатора 3 в положении «О, обеспечивая следящее действие привода за счет перемещения тяг 16 и 14 и дифференциального рычага 15
15
плечие рычаги управления, гидроцилиндры двустороннего действия с поршнями и штоками, связанными с одними концами двуплечих рычагов управления, трехпозицион- ный четырехлинейный гидравлический распределитель, в корпусе которого подвижно установлен золотник, гидронасос с магистралями, связывающими его с гидроцилиндрами, гидробак, отличающаяся тем, что, с целью упрощения конструкции и повышеПри выходе из левого поворота сош- 20 ния надежности, она снабжена рулевым мека 10 перемещается из положения «II в положение «О, перемещая корпус распределителя 9. Жидкость по магистралям 26 и 27 поступает в соответствующие полости цилиндров 22 и 23, причем замок цилиндра 23 удерживает поршень, а следовательно, и рычаг 19 вариатора 3 в положении «О до тех пор, пока шток и поршень цилинд25
ханизмом, шарнирно связанным с корпусом распределителя, тягами и дифференциальным рычагом, середина которого жестко связана с золотником, а концы посредством тяг соединены с другими концами двуплечих рычагов управления, при этом в гидроцилиндрах установлены гидро прав- ляемые механические замки.
ра 22 не вернут рычаг 18 вариатора 2 в положение «О При этом следящее действие привода осуществляется тягами 16 и 14 и дифференциальным рычагом 15
Формула изобретения
Система управления бесступенчатым механизмом поворота транспортного средства, содержащая фрикционные вариаторы, на
плечие рычаги управления, гидроцилиндры двустороннего действия с поршнями и штоками, связанными с одними концами двуплечих рычагов управления, трехпозицион- ный четырехлинейный гидравлический распределитель, в корпусе которого подвижно установлен золотник, гидронасос с магистралями, связывающими его с гидроцилиндрами, гидробак, отличающаяся тем, что, с целью упрощения конструкции и повышения надежности, она снабжена рулевым ме
ханизмом, шарнирно связанным с корпусом распределителя, тягами и дифференциальным рычагом, середина которого жестко связана с золотником, а концы посредством тяг соединены с другими концами двуплечих рычагов управления, при этом в гидроцилиндрах установлены гидро прав- ляемые механические замки.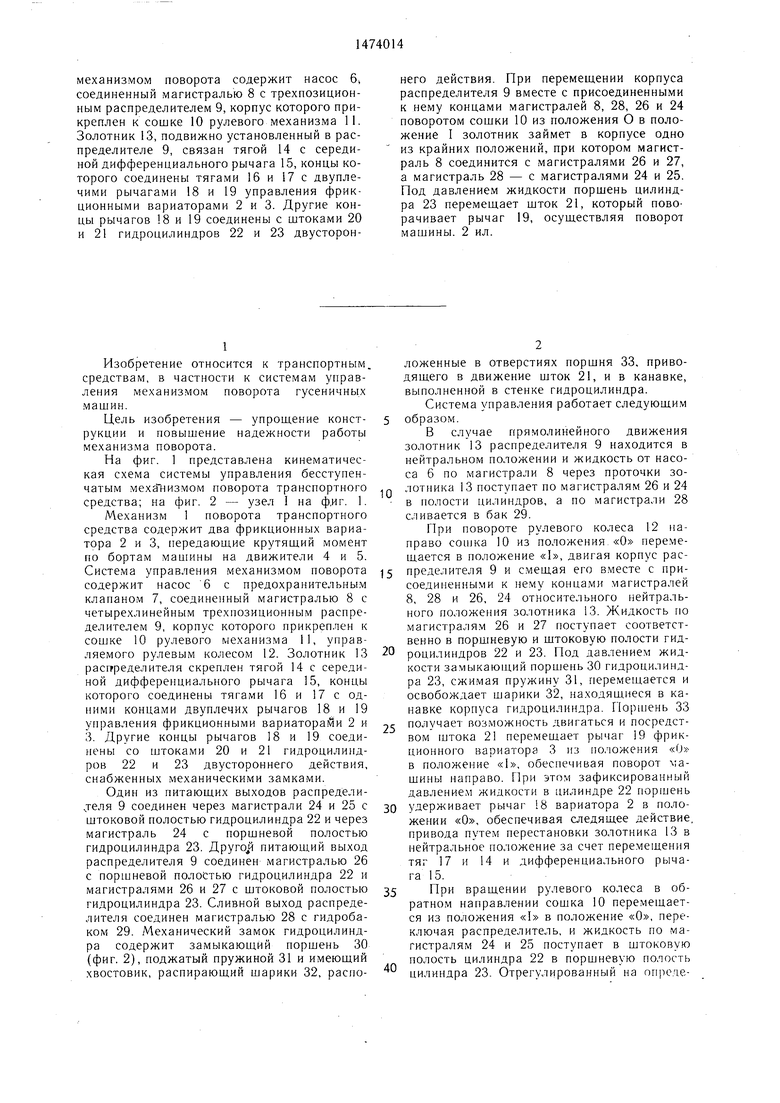
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Система управления блокировкой дифференциала ведущего моста колесного транспортного средства | 1990 |
|
SU1763256A1 |
| Гидравлическое рулевое управление | 1978 |
|
SU690131A1 |
| Система управления бесступенчатым механизмом поворота транспортного средства | 1991 |
|
SU1789405A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Система рулевого управления колесного транспортного средства | 1985 |
|
SU1273286A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКОЙ ДИФФЕРЕНЦИАЛА ВЕДУЩЕГО МОСТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2246060C2 |
Изобретение относится к транспортным средствам, в частности к системам управления механизмом поворота гусеничных машин. Цель изобретения - упрощение конструкции и повышение надежности работы механизма поворота. Система управления механизмом поворота содержит насос 6, соединенный магистралью 8 с трехпозиционным распределителем 9, корпус которого прикреплен к сошке 10 рулевого механизма 11. Золотник 13, подвижно установленный в распределителе 9, связан тягой 14 с серединой дифференциального рычага 15, концы которого соединены тягами 16 и 17 с двуплечими рычагами 18 и 19 управления фрикционными вариаторами 2 и 3. Другие концы рычагов 18 и 19 соединены с штоками 20 и 21 гидроцилиндров 22 и 23 двухстороннего действия. При перемещении корпуса распределителя 9 вместе с присоединенными к нему концами магистралей 8, 28, 26 и 24 поворотом сошки 10 из положения 0 в положение 1 золотник займет в корпусе одно из крайних положений, при котором магистраль 8 соединится с магистралями 26 и 27, а магистраль 28 - с магистралями 24 и 25. Под давлением жидкости поршень цилиндра 23 перемещает шток 21, который поворачивает рычаг 19, осуществляя поворот машины. 2 ил.
J/
33
| Гидравлическая система управления механизмом поворота транспортного средства | 1984 |
|
SU1235785A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
