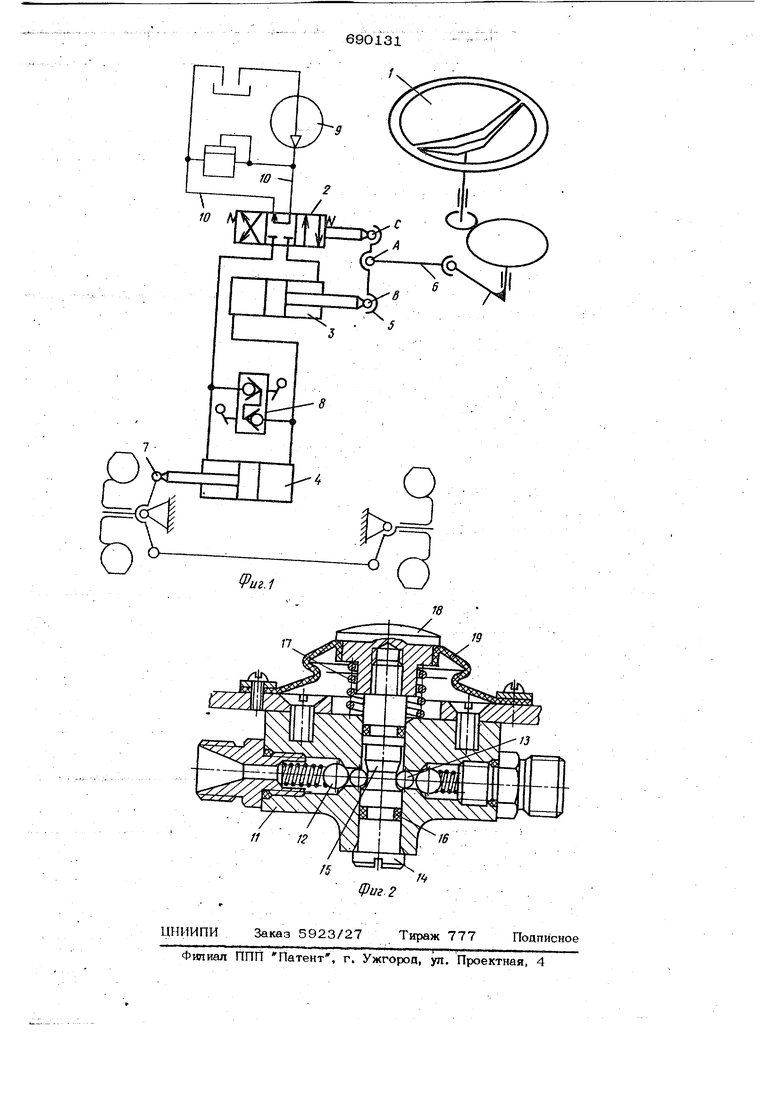
Изобретение относится к области землеройнь|х и сухопутнь1х машин, а именно к гидравлическому рулевому управлению строи-гельно-дорожных машин. Известно гидравлическое рулевое уп.равление экскаваторов, содержащее рулевой механизм с рулевым колесом и слё д;ящей сошкой, насос с напорной и сливной магистралями, распределитель, жест ко прикрепленный к штокам вспомогатель ных цилиндров, полости которых сообщаются с полостями исполнительного цилиндра, воздействующего с помощью рычагов и тяг на управляемые колеса, при этом насосные и беэнасосные полости каждого из вспомогательных цилиндров соединены между собой трубопроводами, в которые включены обратные клапаны и регулировоч ные краны, а напорная и сливная магистрали соединены между собой трубоЩ)оводом, в которые включен напорнь1й золотник l.. Недостатком известного устройства является некомпазстабсть и сложность Конструкции. Известно рулевое управление, содержащее рулевое колесо с рулевым механизмом, насос с напорной и сливной магистралями, в которых установлены распредели ель, вспомогательный в исполнительный силовые цилйнд, поршневые полости коTOfHrfx сообщены между собой, а штоковые. с распределителем, при этом Шток вспомогательного силового цилиндра шарнирно соединен рычагом со штоком распределителя и с тягой рулевого управления, а шток исполнительного цилиндра - с механизмом поворота колес, механизм соглас ования положения поршней силовых цилаядров, выполненный в виде золотника и двух обратных клапанов, подключенных параллельно исполнительному цилиндру Недостатком этого устройства является сложность конструкции и ненадежность в работе. - г: - :: :.-; - -.---- . . .--; -.-.. .. - :-. 369013 Целью изобретения является увелич©нне надежности в работе за счет упрошения конструкции и удобства регулировки. Поставленная цель достигается тем, что механизм согласования силовых ци- s линдров выполнен в виде корпуса, в котором образованы перпендикулярно расположенные и пересекающиеся между собой каналы, в одном таком канале смонтированы два обратных клапана, направленные Ю запорными элементами навстречу друг другу, а в другом - подоружинениый стержень с нажимной головкой и конусной проточ- кой в зоне пересечения каналов, в которой установлены толкающие-шарики, вза- is имодействуюшие при открытии с запорныМИ элементами обратных клапанов. На фиг. 1 изображена схема гидравли ческого рулевого управления; на фиг. 2 общий вид механизма согласования сило- 20 вых цилиндров. Гидравлическое рулевое управление со- . . держит рулевой механизм 1, трехпозиционный распределитель 2, вспомогатель.ный 3 и исполнительный 4 гидродилиндры, порцшевые полости которых сообщены между собой, а штоковые с распределителем 2. При этом шток вспомогательного цилиндра 3 соединен дифференциальным рычагом 5 со штоком распределителя 2 и с тягой рулевого управления 6, а шток цилиндра 4 - с механизмом 7 поворота колес. Управление содержит также механиам 8, согласования силовых цилиндров. насос 9 с напорной и сливной магистралями 10. Механизм согласования силовых цилиндров включен в гидролинию параллельно исполнительному силовому цилиндру 4 и содержит корпус 11, внутри которого выполнены перпендикулярно друг другу каналы. В одном канале смонтированы обратные клапаны 12, направленные запорныМИ элементами навстречу друг другу, и толкающие шарики 13, установленные в входных каналах клапанов. В другом канале установлен управляющий стержень 14, в зоне пересечения каналов на стержне выполнены конусные проточки 15 .и установлены уплотняющие элементы 16 и пружнна 17.Стерже№ имеет нажимную головку 18 и герметизирующий кожух 19. Стер. женъ 14 подпружинен на закрытие обратных клапанов. Когда распределитель 2 находится в среднем фиксированном положении, напорная и сливная линии 10 гидросистемы соединены, полости цилиндров 3 и 4 заперты. 55 ..---- - 14Рулевое управление работает следующим образом, При повороте рулевого колеса перемешается тяга 6 и дифференцированный 5 обратной связи, с которым свяэаньг штоки вспомогательного цилиндра 3 и распределителя 2. Так как силы, противодействуюшие смешению распределителя, значительно меньше соответствующих сил, действующих в системе вспомогательного доршня 3, то точка В может рассматриваться в начале движения тяги 6 как иеподвижная, а точка / подвижная, ввиду движение тяги вызовет через рычаг 5 смешение плунжера распределителя 2. В результате рабочая жидкость поступа соответствующую полость одного из цилшдров. чтю вызовет благодаря последовательному их включению синхронное перемещение поршней, а следовательно, и точек выхода В и С на некоторый пропорциональный перемещению тяj,jj Q (повороту рулевого колеса), После того как движение тяги 6 будет прекрашено, продолгкающий двигаться пор цилиндра 3 сообщит через рычаг 5 обратной связи плунжеру распределителя 2 перемещение, противополонсное тому, которое он получил до этого. Когда расходные окна распределителя, в результа обратного движения плунжера, полност-ью перекроются, скорости обоих цилиндров станут равными нулю, При смещении плунжера в противополОждую сторону движение всех элементов устройства будет происходить в обратном направлении, Неизбежные утечки рабочей жидкости замкнутого объема, образованного полостями гидроцилиндров 3 и 4 и соединяк)Щего их трубопроводами, приводит к нарушению согласованного положения поршд й цилиндров. Регулировка синхронности производится следующим образом. Нажимают на . ловку 18, в результате деформируется пружина 17, которая сдвигает стержень 4 в нижнее положение. При этом толка„щие щарики 13 выжимаются из конусной 15, отжимают каждый из запор элементов клапанов 12 от седла, и полости исполнительного цилиндра 4 ока1, зываются соединенными между собой. Далее поворотом в нужное положение рулевого кблеса восстанавливается согласованное положение, причем в процессе регулирования поршень исполнительного цилиндра 4 остается неподвижным, так как силы, противодействующие его смешению, значительно больше соответс-гаующйх сил, действующих в системе силовогб поршня 3. Включение в гидравшическую схему параллельно исполнительному цилиндру 4 двух встречных управляемых обратных кла панов поэволило значительно упростить конструкиию и повысить надежность рулевого управления,, Формула изобретения Гидравлическое рулевое упранление, .содержащее рулевое колесо.с рулевым механизмом, насос с напорной в сливной магистралями, в которых установлен распределитель, вспомогательный и исполнительный силовые цилиндры, поршневые полости которых сообщены между собой, а штоко- вые - с распределителем, при этом шток вспомогательного цилиндра шарнирно соединен рычагом со штоком распределителя и с тягой рулевого управления, а шток исполнительного цилиндра - с механизмом
690131 поворота колес, метанизм согласования йоложения nopuiHei СЕЛОВЫХ иилвндров, вклю ченный параллельно исполнительному кв линдру, отличающееся тем, что, с целью повьтшенЁя надежности ребо ты за счет упрдщення конструкции и удобства регулировки, механизм согласования силовых пилшдров выдолйвн в виде кор пуса с перпендикулярно расположенными и пересекающиеся между собой каналами, в одном таком канале смонтированы обратные клапашл С седлами для запорных эле«ментов, направпеннкгх навстречу друг другу, а в другом канале - подпружиненный стержень с нажимной головкой и конусной проточкой в зоне пересеченая каналов, в которой установлены шарика, взаимодействующие при открытий с запорными элементами обратных клапанов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 165987, кл, Б 02 F 9/22, 1963. 2.Авторское свидетельство СССР й 272156, кл. Б 02 F 9/22, 1970 (прототип).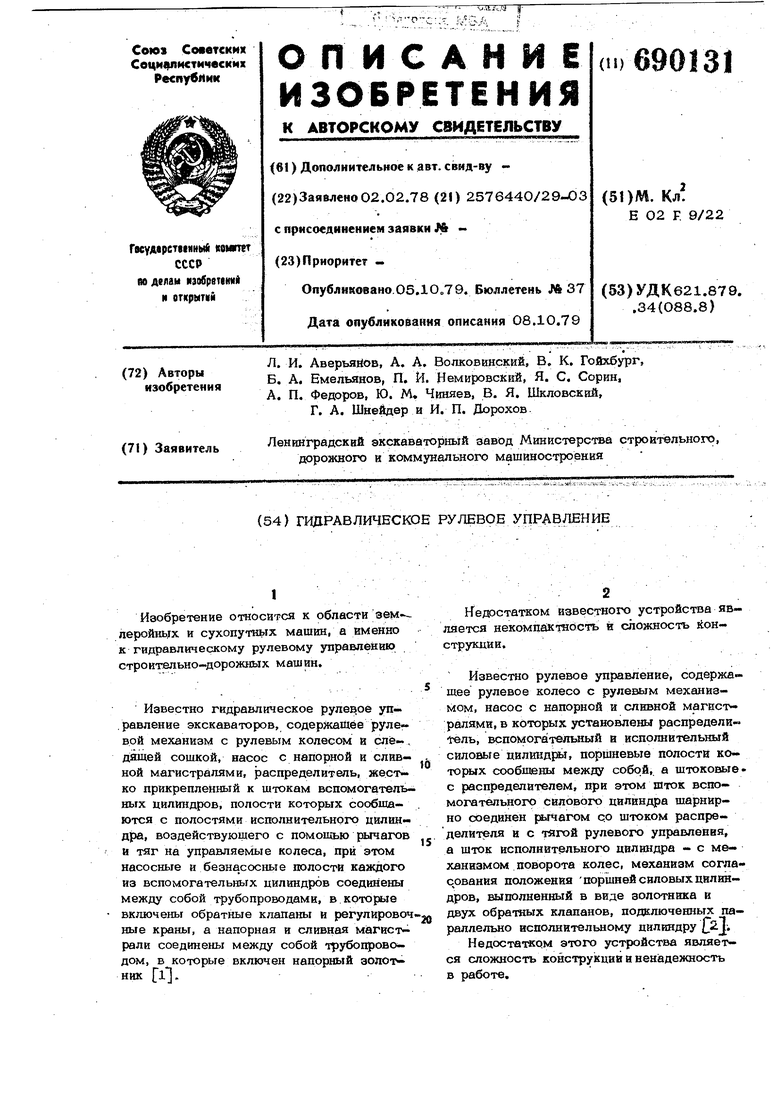
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| ГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ С ШАРНИРНО СОЧЛЕНЕННОЙ РАМОЙ | 1967 |
|
SU190225A1 |
| ГИДРАВЛИЧЕСКОЕ РУЛЕВОЕ УПРАВЛЕНИЕ СЛЕДЯИ^РвТИПА | 1964 |
|
SU165987A1 |
| ГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ С ШАРНИРНО СОЧЛЕНЕННОЙРАМОЙ | 1968 |
|
SU220065A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА ПОВОРОТАКОЛЕС | 1970 |
|
SU272156A1 |
| Система рулевого управления | 1977 |
|
SU742233A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Устройство для натяжения гусеничной ленты | 1991 |
|
SU1781123A1 |