(21)4277015/24-24
(22)06.07.87
(46) 23.04.89. Бюл. № 15
(71)Уфимский авиационный институт им. Серго Орджоникидзе
(72)В.В.Гейченко, Р.Н.Киямов и М.Ю.Озеров
(53)62-50(088.8)
(56)Растригин Л.А. Системы экстремального управления. - М.: 1974,
с.154-155.
Там же, с.132-138.
(54)ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР
(57)Изобретение относится к экстремальному управлению и может быть использовано при построении экстремальных регуляторов различных назначений, работающих в условиях помех. Целью изобретения является повышение надежности экстремального регулятора. Регулятор содержит исполнительный блок 1, сумматоры 2, 10, 13, объект управления 3, программный блок 4, генератор пробных шагов 5, блок памяти 6, блок разности 7, датчик выходной величины исполнительного блока 8, компаратор 9, триггер Шмитта 11, ключ 12. Регулятор позволяет вернуть рабочую точку в район экстремума при случайном ее выходе, например при действии помех на ект управления, при сбоях в процессе работы. 3 ил.
с S
(Л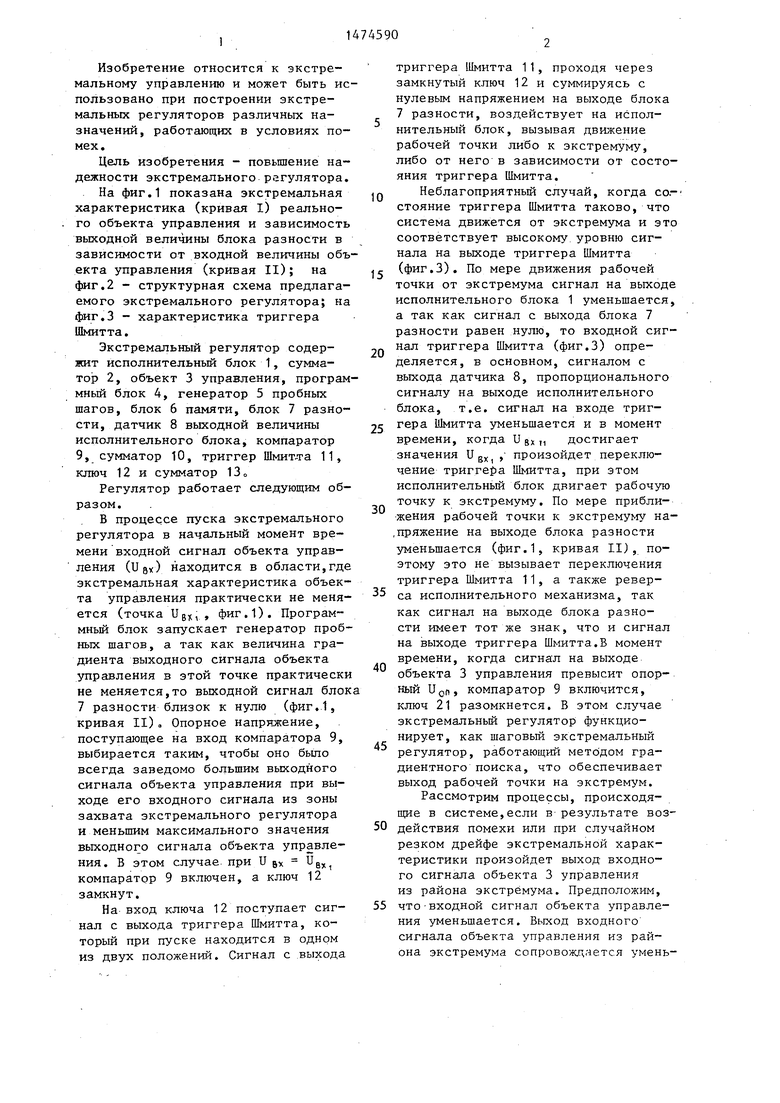
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система экстремального регулирования | 1980 |
|
SU885972A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Система управления | 1983 |
|
SU1168896A1 |
| Устройство экстремального регулирования для полосового фильтра | 1975 |
|
SU539297A1 |
| Устройство для поиска экстремума функционала входных сигналов инерционного объекта | 1981 |
|
SU978100A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Система экстремального регулирования | 1980 |
|
SU974338A1 |
| Система управления | 1981 |
|
SU996995A1 |
Изобретение относится к экстремальному управлению и может быть использовано при построении экстремальных регуляторов различных назначений, работающих в условиях помех. Целью изобретения является повышение надежности экстремального регулятора. Регулятор содержит исполнительный блок 1, сумматоры 2,10,13, объект управления 3, программный блок 4, генератор пробных шагов 5, блок памяти 6, блок разности 7, датчик выходной величины исполнительного блока 8, компаратор 9, триггер Шмитта 11, ключ 12. Регулятор позволяет вернуть рабочую точку в район экстремума при случайном ее выходе, например при действии помех на объект управления, при сбоях в процессе работы. 3 ил.
Ј 1
4ь
сл
со
Изобретение относится к экстремальному управлению и может быть использовано при построении экстремальных регуляторов различных назначений, работающих в условиях помех.
Цель изобретения - повышение надежности экстремального регулятора.
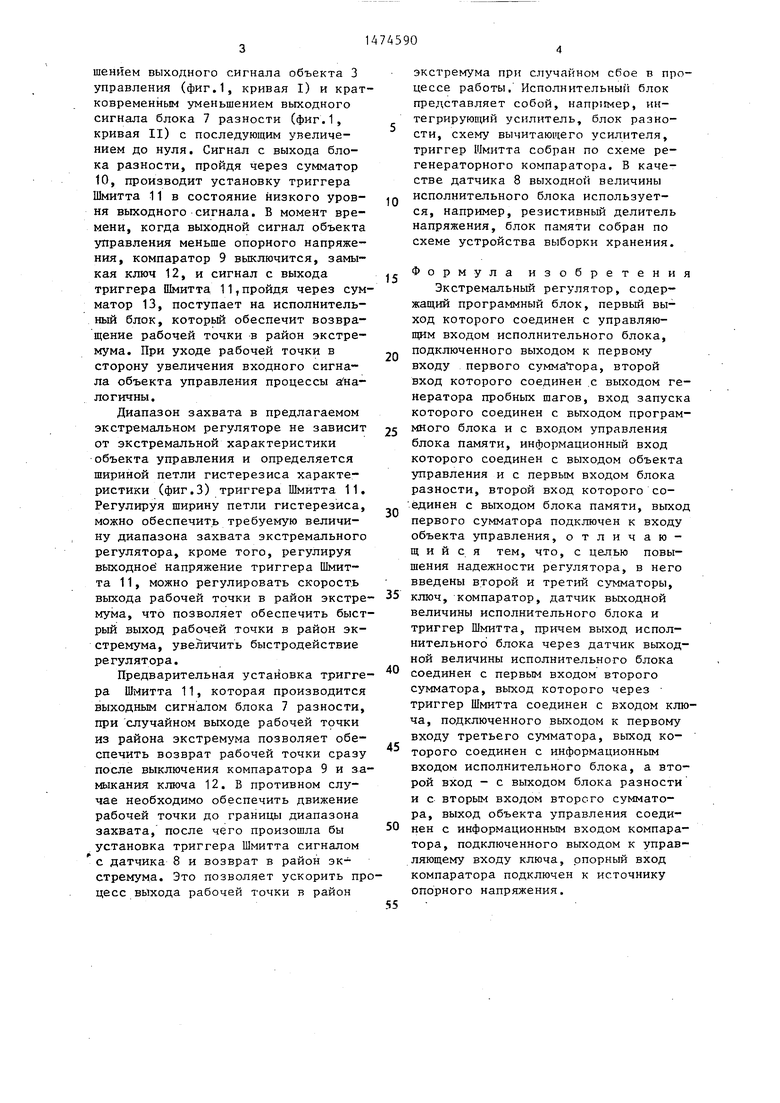
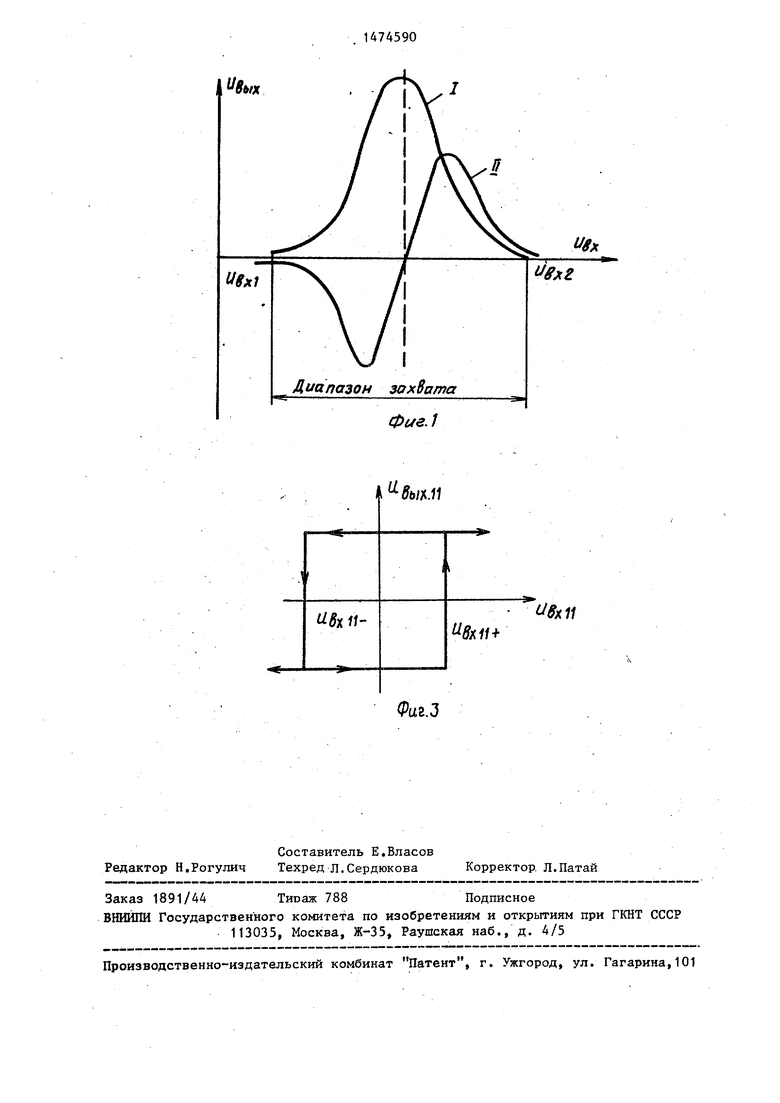
На фиг.1 показана экстремальная характеристика (кривая I) реального объекта управления и зависимость выходной величины блока разности в зависимости от входной величины объекта управления (кривая II); на фиг.2 - структурная схема предлагаемого экстремального регулятора; на фиг.З - характеристика триггера Шмитта.
Экстремальный регулятор содержит исполнительный блок 1, сумматор 2, объект 3 управления, программный блок 4, генератор 5 пробных шагов, блок 6 памяти, блок 7 разности, датчик 8 выходной величины исполнительного блока, компаратор 9, сумматор 10, триггер Шмит-та 11, ключ 12 и сумматор 13„
Регулятор работает следующим образом.
В процессе пуска экстремального регулятора в начальный момент времени входной сигнал объекта управления (U g) находится в области, где экстремальная характеристика объекта управления практически не меняется (точка UBX, , фиг.1). Программный блок запускает генератор пробных шагов, а так как величина градиента выходного сигнала объекта управления в этой точке практически не меняется,то выходной сигнал блок 7 разности близок к нулю (фиг.1, кривая II). Опорное напряжение, поступающее на вход компаратора 9, выбирается таким, чтобы оно было всегда заведомо большим выходного сигнала объекта управления при выходе его входного сигнала из зоны захвата экстремального регулятора и меньшим максимального значения выходного сигнала объекта управления. В этом случае при U 6Х UBXi компаратор 9 включен, а ключ 12 замкнут.
На вход ключа 12 поступает сигнал с выхода триггера Шмитта, который при пуске находится в одном из двух положений. Сигнал с выхода
0
5
0
5
0
5
0
5
0
5
триггера Шмитта 11, проходя через замкнутый кпюч 12 и суммируясь с нулевым напряжением на выходе блока 7 разности, воздействует на исполнительный блок, вызывая движение рабочей точки либо к экстремуму, либо от него в зависимости от состояния триггера Шмитта.
Неблагоприятный случай, когда со.- стояние триггера Шмитта таково, что система движется от экстремума и это соответствует высокому уровню сигнала на выходе триггера Шмитта (фиг.З). По мере движения рабочей точки от экстремума сигнал на выходе исполнительного блока 1 уменьшается, а так как сигнал с выхода блока 7 разности равен нулю, то входной сигнал триггера Шмитта (фиг.З) определяется, в основном, сигналом с выхода датчика 8, пропорционального сигналу на выходе исполнительного блока, т.е. сигнал на входе триггера Шмитта уменьшается и в момент времени, когда U gx м достигает значения UBX), произойдет переключение триггера Шмитта, при этом исполнительный блок двигает рабочую точку к экстремуму. По мере приближения рабочей точки к экстремуму напряжение на выходе блока разности уменьшается (фиг.1, кривая II), поэтому это не вызывает переключения триггера Шмитта 11, а также реверса исполнительного механизма, так как сигнал на выходе блока разности имеет тот же знак, что и сигнал на выходе триггера Шмитта.В момент времени, когда сигнал на выходе объекта 3 управления превысит опорный U0n, компаратор 9 включится, ключ 21 разомкнется. В этом случае экстремальный регулятор функционирует, как шаговый экстремальный регулятор, работающий методом градиентного поиска, что обеспечивает выход рабочей точки на экстремум.
Рассмотрим процессы, происходящие в системе,если в результате воздействия помехи или при случайном резком дрейфе экстремальной характеристики произойдет выход входного сигнала объекта 3 управления из района экстремума. Предположим, что входной сигнал объекта управления уменьшается. Выход входного сигнала объекта управления из района экстремума сопровождается уменьенйем выходного сигнала объекта 3 правления (фиг.1, кривая I) и кратовременным уменьшением выходного сигнала блока 7 разности (фиг.1, кривая II) с последующим увеличением до нуля. Сигнал с выхода блока разности, пройдя через сумматор 10, производит установку триггера митта 11 в состояние низкого уровня выходного сигнала. В момент времени, когда выходной сигнал объекта управления меньше опорного напряжения, компаратор 9 выключится, замыкая ключ 12, и сигнал с выхода триггера Шмитта 11,пройдя через сумматор 13, поступает на исполнительный блок, который обеспечит возвращение рабочей точки в район экстремума. При уходе рабочей точки в сторону увеличения входного сигнала объекта управления процессы а на- логичны.
Диапазон захвата в предлагаемом экстремальном регуляторе не зависит от экстремальной характеристики объекта управления и определяется шириной петли гистерезиса характеристики (фиг.З) триггера Шмитта 11. Регулируя ширину петли гистерезиса, можно обеспечить требуемую величину диапазона захвата экстремального регулятора, кроме того, регулируя выходное напряжение триггера Шмитта 1 1 , можно регулировать скорость выхода рабочей точки в район экстремума, что позволяет обеспечить быстрый выход рабочей точки в район экстремума, увеличить быстродействие регулятора.
Предварительная установка триггера Шмитта 11, которая производится выходным сигналом блока 7 разности, при случайном выходе рабочей точки из района экстремума позволяет обеспечить возврат рабочей точки сразу после выключения компаратора 9 и замыкания ключа 12. В противном случае необходимо обеспечить движение рабочей точки до границы диапазона захвата, после чего произошла бы установка триггера Шмитта сигналом с датчика 8 и возврат в район экстремума. Это позволяет ускорить процесс выхода рабочей точки в район
0
5
0
5
0
5
0
5
0
экстремума при спучайном сбое в процессе работы. Исполнительный блок представляет собой, например, интегрирующий усилитель, блок разности, схему вычитающего усилителя, триггер Шмитта собран по схеме регенераторного компаратора. В качестве датчика 8 выходной величины исполнительного блока используется, например, резистивный делитель напряжения, блок памяти собран по схеме устройства выборки хранения.
Формула изобретения
Экстремальный регулятор, содержащий программный блок, первый выход которого соединен с управляющим входом исполнительного блока, подключенного выходом к первому входу первого сумматора, второй вход которого соединен с выходом генератора пробных шагов, вход запуска которого соединен с выходом программного блока и с входом управления блока памяти, информационный вход которого соединен с выходом объекта управления и с первым входом блока разности, второй вход которого соединен с выходом блока памяти, выход первого сумматора подключен к входу объекта управления, отличающийся тем, что, с целью повышения надежности регулятора, в него введены второй и третий сумматоры, ключ, компаратор, датчик выходной величины исполнительного блока и триггер Шмитта, причем выход исполнительного блока через датчик выходной величины исполнительного блока соединен с первым входом второго сумматора, выход которого через триггер Шмитта соединен с входом ключа, подключенного выходом к первому входу третьего сумматора, выход которого соединен с информационным входом исполнительного блока, а второй вход - с выходом блока разности и с вторым входом второго сумматора, выход объекта управления соединен с информационным входом компаратора, подключенного выходом к управляющему входу ключа, опорный вход компаратора подключен к источнику опорного напряжения.
«to
ых
USxl
Диапазон захвата
6х 11Фие.1
авы.Н
8x11+
to 11
PuaJ
