(54) СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1980 |
|
SU974338A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| Экстремальный регулятор | 1987 |
|
SU1474590A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для определения экстре-МАльНыХ зНАчЕНий СлучАйНыХпРОцЕССОВ | 1978 |
|
SU805358A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
1
Изобретение относится к системам экстремального регулирования малоинерционными объектами с несимметричной экстрема.г1ьной характеристикой.
Известна система экстремального регулирования, содержащая командный генератор, блоки памяти и последовательно соединенные сравнивающий элемент, реверсивный элемент, исполнительный элемент, объект регулирования, датчик экстремума и ключ 1 .
К недостаткам известной системы относится наличие поисковых колебаний, малая надежность и точность работы, особенно для случая регулирования объекта с несимметричной характеристикой.
Наиболее близким к предлагаемому является система экстремального регулирования, содержащая первый ключ, первый и второй блоки памяти, выходы которых соединены с соответствующими входами первого сумматора и последовательно соединенные программный блок управления, исполнительный элемент, объект регулирования и датчик экстремума 2.
Недостаток известной системы экстремального регулирования - малые точность и надежность, особенно для малоинерционкых объектов с несимметричной характеристикой.
Цель изобретения - повышение точности и надежности системы.
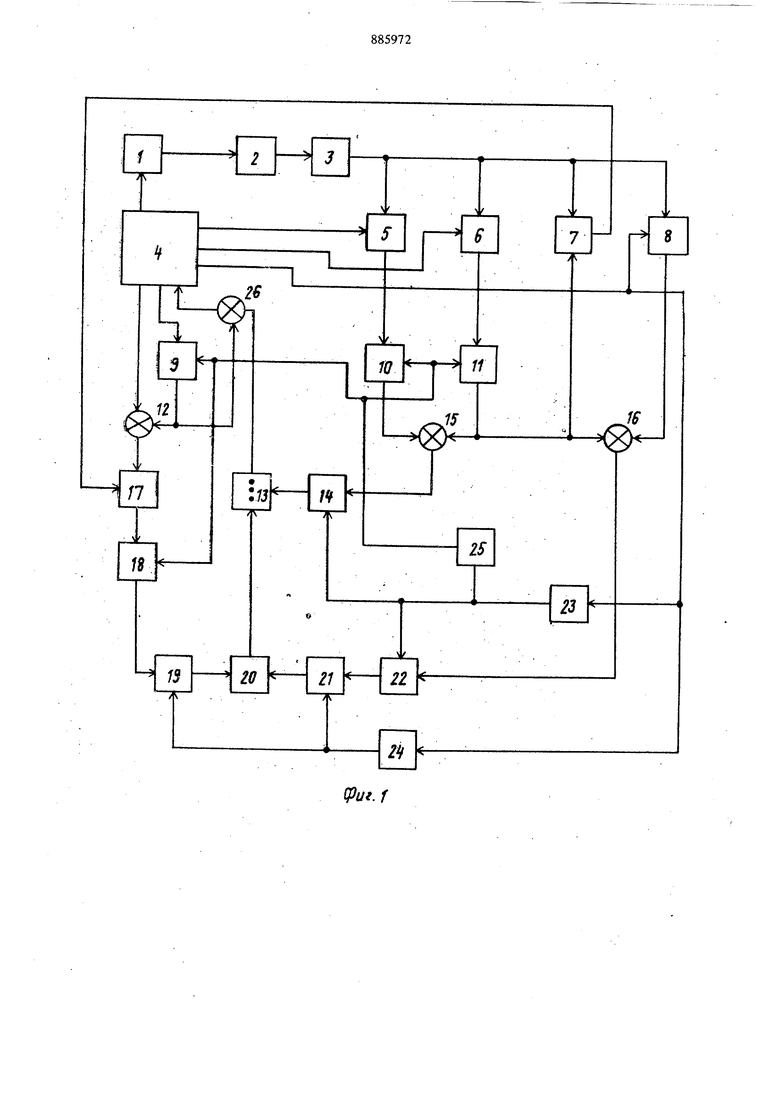
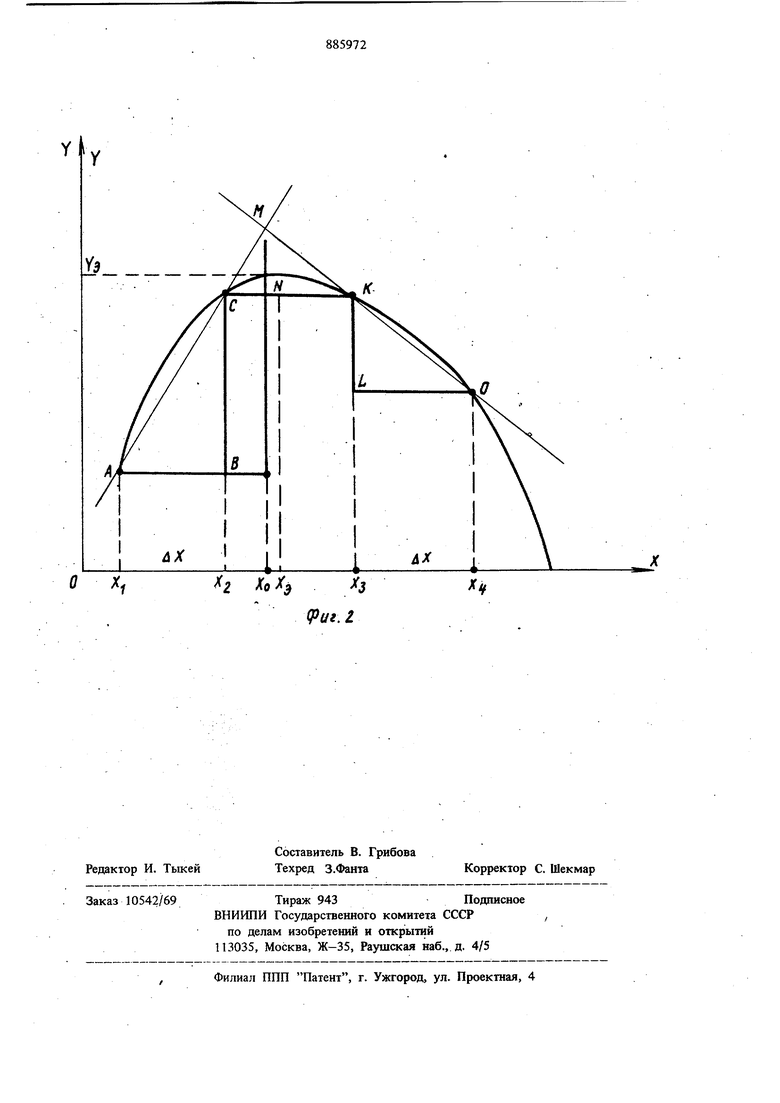
Поставленная цель достигается тем, Что система экстремального регулирования содержит второй и третий ключи, три блока задержки, компаратор, последовательно соединенные
10 четвертый ключ, второй сумматор, третий блок памяти, пятый ключ, блок умножения, делитель и третий сумматор и последовательно соединенные четвертый блок памяти, четвертый сумматор, шестой ключ, пятый блок памяти
15 и седьмой ключ, выход которого соединен со вторым входом блока умножения, выход датчика экстремума соединен с первым входом компаратора, с первым входом четвертого ключа, через последовательно соединенные вто20рой ключ, второй блок памяти и компаратор - со вторым входом шестого ключа через первый ключ - с первым входом первого блока памяти, второй выход программHoro блока зшравления соединен со вторым входом четвертого ключа и через первый йггок задержки соединен со вторыми входами пятого и седьмого ключей и непосредственио со входом второго блока задержки, выход которого соединен со вторыми входами треть го блока памяга, и через третий ключ со вторым входом делителя и через третий блок задержки - с первым входом четвертого блока памяти, вторым входом пятого блока памяти и со вторыми входами первого блока памяти и второго блока памяти, выход которого соединен со вторым входом второго сумматора, выход первого сумматора подключен ко второму входу третьего ключа, третий четвертый, пятый и шестой выходы программ ного блока управления соединены со вторыми входами соответственно первого и второго ключей, четвертого сумматора и четвертого блока памяти, вход программного блока управления подключен к выходу третьего сумма тора, второй вход которого соединен с выходом четвертого блока памяти. На фиг. 1 представлена схема системы регулирования; на фиг. 2 - график экстремаль ной зависимости. Система содержит исполнительный элемент 1, объект 2 регулирования, датчик 3 экстремума, программньш блок 4 управления, первый ключ 5, второй ключ 6, компаратор 7, четвертый ключ 8, четвертый блок 9 па. мяти, первый блок 10 памяти, второй блок 11 памяти, четвертый сумматор . 12, делитель 13, третий ключ 14, первый сумматор 15, второй сумматор 16, шестой ключ 17, пятый блок 18 памяти, седьмой ключ 19, блок 20 умножения, пятый ключ 21, третий блок 22 памяти, второй блок 1Ъ задержки; первый блок 24 задержки, третий блок 25 задержки, третий сумматор 26. Система работает следующим образом. Программный блок 4 управления подает на вход исполнительного элемента 1 начальну входную величину X . и на второй вход первого ключа 5 поступает сигнал на открывание, на первый вход которого поступает выходная величина (у , соответствующая поданному регулирующему воздействию Х Значение Q запоминается в первом блоке 10 памяти. Затем величине Х/( дается приращение ДХ и с выхода программного блока 4 на исполнительный элемент 1 поступает величина которая запоминается четвертым блоком памяти 9. После поступления с программного блока 4 управления импульсного сигнала на открывание второго ключа 6, выходной сигнал Vc с да чика 3 экстремума поступает во рторой. блок И памяти и запоминается в нем. Посл .4 алгебраического суммирования на выходе первого сумматора 15 получается приращение регулируемого сигнала ду Сигнал X уведшчивается до тех пор, пока выходная величина не достигнет величины К с I фиксируется компаратором 7, на выходы которого поступает запомненная ранее величина )с с выхода второго блока 6 памяти и текущая величина с выхода датчика 3 экстремума. В момент, когда J4 - и , компаратор подает импульс на вход шестого ключа 17 и через Hiero проходит сигнал, равный , с выхода алгебраического четвертого сумматора 12. Затем в программном блоке 4 управления регулирующая величина Х увеличивается на ЛХ и сигнал Х Ха, А X поступает на вход исполнительного элемента 1. Кроме того, в момент, когда подается импульс на открывание четвертого ключа 8 и на входы первого и второго блоков 23 и 24 задержки. Текущая выходная координата проходит через четвертый ключ 8 и на выходе алгебраического второго сумматора 16 сравнивается с сигналом yj.riln, запомненному во втором блоке 6 памяти. Сигнал с выхода второго сумматора 16 поступает на третий блок 22 памяти и запоминается в нем. Затем через время -t f jCJAQ ema. наступления импульса на вход первого блока 24 задержки с последнего поступает на вторые входы ключей 19 и 21 импульс и открывает их. Сигналы с выходов блоков 18 и 22 памяти перемножаются в блоке 20 умножения. По сигналу с выхода второго блока задержки через Тзо( в делителе 13 сигнал с выхода блока 20 умножения делится на сигнал с выхода первого сумматора 15. Сигнал с выхода делителя 13 в третьем сумматоре 26 складьшается с сигналом У и на выходе третьего сумматора получается величина регулирующего сигнала Хо , близкая к Хд , что соответствует выходной величине объекта регулирования, близкой к экстремуму. Эта величина программным блоком .4 управления подается на вход исполнительного элемента 1. Сигналами с выходов блоков 23 и 25 задержки все блоки памяти обнуляются. Затем с целью уточнения положения экстремума и приближения найденного значения Хо к необходимо описанную операщ1ю повторить, но уже с другими меньшими значениями Д X и в пределах значений регулирующего воздействия от X 2. ДО Хз правило, на практике достаточно одного уточнения найденного значения X о близкого к X э - V 9 Таким образом, предлагаемый регулятор позволяет с большой точностью определять значение регулирующего воздействия для обес. печения экстремального значения выходного параметра. Отсутствие колебаний вокруг точки экстремума позволяет увеличить его надежность, так как исполнительный элемент 1 не работает в реверсивном импульсном режиме, а после определения значения УО с достаточной точностью некоторое время стоит. Кроме того, отсутствие колебаний увеличивает экономичность системы регулирования, так как не нужны затраты на поиск. Формула изобретения Система экстремального регулирования, содержащая первый ключ, первый и второй блоки памяти, выходы которых соединены с соответствуинцими входами первого сумматора и последовательно соединенные программный бло управления, исполнительный элемент, объект регу лировання и датчик экстремума, отличающаяся тем, что, с целью повыщения точности и надежности, она содержит второй и третий ключи, три блока задеряжи, компаратор, последовательно соединенные четвертый ключ, второй. сумлгатор, третий блок памяти, пятый ключ, блок умножения, делитель и третий сумматор и последовательно соединенные четвертый блок памяти, четверты сумматор, щеСтой ключ, пятый блок памяти и седьмой ключ, выход которого соединен со вторым входом блока умножения, выход датчика экстремума соедашен с первым входом компаратора, с первым входом четвертого ключа, через последовательно соединенные второй ключ, второй блок памяти и компаратор - со вторым входом шестого ключа через первый ключ - с первым входом первого блока памяти, второй выход программного блока управления соеданен со вторым входом четвертого ключа и через первый блок задержки соединен со вторыми входами пятого и седьмого ключей и непосредствешю со входом второго блока задержки, выход которого соединен со вто{н 1ми входами третьего блока памяти и через третий ключ е вторьпм входом делителя и «врез третий бпок задержки - с первым входом четвертого блока памяти, вторым входом пятого блока памяти и со вторыми входами первого блока памяти и второго блока памяти, выход которого соединен со вторым входом второго сумматора, выход первого сумматора подключен ко второму входу третьего ключа, третий, четвертый, пятый и шестой выходы программного блока управления соединены со вторыми входами соответственно первого и второго ключей, четвертого сумматора и четвч)того блока памяти, вход программного блока управления подключен к выходу третьего сумматора, второй вход которого соединен с выходом четвертогб блока памяти. Источники информации, принятые во внимание при экспертизе 1. Санковсккй Е. А. и др. Основы автоматического управле&ия. МВИЗРУ, Минск, 1968, с. 282.,... . 2. Самонастраивающиеся системы. Справочникпод общ. ред. П.И.Чинаева. К., Наукова думка, 1969, с. 19 (прототип).
