со со to
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам привода реверсивного транспортера кормораздатчика.
Цель изобретения - повышение надежности в работе.
На фиг. I схематично изображен механизм привода реверсивного транспортера в рабочем положении, общий вид; на фиг. 2 - то же, в нерабочем положении; на фиг. 3 - вариант выполнения храпового колеса с криволинейными боковинами его зубьев, об- ш,ий вид; на фиг. 4 - вариант выполнения механизма привода реверсивного транспортера с дополнительной собачкой, обший вид; на фиг. 5 - вариант выполнения собачек, в нейтральном положении, вид с торца; на фиг. 6 - то же, при врашении храпового колеса против часовой стрелки; на фиг. 7 то же, при вращении храповогч) колеса по часовой стрелке; на фиг. 8 - геометрическая схема размещения собачки и водила относительно зубьев храпового колеса.
Механизм привода содержит храповое колесо 1, кинематически связанное с веду- п|им валом подающего транспортера 2 кормораздатчика посредством, например, цепной передачи 3. Храповое колесо взаимодействует с основной ведущей собачкой 4, которая закреплена на водиле 5 при помощи пружины 6. Водило установлено с возможностью поворота относительно оси храпового колеса и шарнирно связано с П атуном 7, приводимым в движение, например, криво- 1НИПО.М или эксцентриком 8. Механизм снабжен ограничителем рабочего хода собачки, который выполнен в виде основного упора 9, взаимодействующего с выступом 10 собачки и установленного с возможностью фиксированного перемещения вдоль зубьев 11 храпового колеса. Упор 9 размеп1ен в конце рабочего хода собачки 4 в направ-лении вращения храпового колеса, причем длина рабочей поверхности упора меньше д.лины рабочего хода собачки. Зубья храпового колеса имеют форму равнобочной трапеции. Собачка установлена с возможностью прилегания к боковинам зубьев храпового колеса своим торцом, который расположен под прямым углом к ее продольной оси. Кроме , собачка в рабочем положении размещена к проходящему через центр ее поворота радиусу храпового колеса под острым углом (., определяемым из соотнощения
где р -угол при вершине зуба храпового
Ko. ieca, град;
f -угол межд упомянугым радпусом п радиусом, проходяпип через вершину зуба xpaiioiioiu Ko.ieca. При этом обеспечивается плавный выход собачки из зацепления с наименьшей нагрузкой.
0
5
0
5
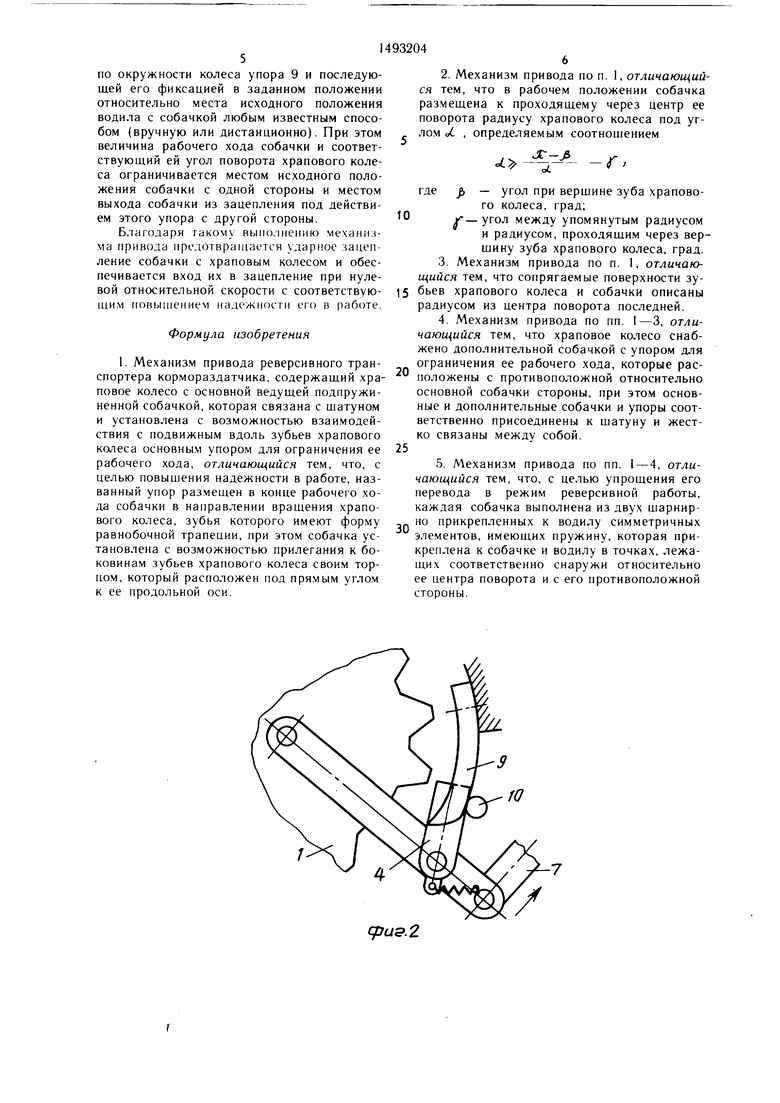
Сопрягаемые поверхности зубьев храпо- вог о колеса и собачки могут быть описаны радиусом из центра поворота последней, чем обеспечивается более плавный выход собачки из зацепления (фиг. 3).
Механизм привода реверсивного транспортера (фиг. 4) может быть выполнен с дополнительными ведущей подпружиненной собачкой 12 и упором 13 для ограничения ее рабочего хода, которые расположены с противоположной относительно основной собачки 4 стороны. Собачка 12 закреплена на водиле 14, при этом водила 5 и 14 шарнирно связаны посредством тяги 15 с общим шатуном 7, а упоры 9 и 13 жестко соединены между собой, например, с помощью эле.мен- та 16 или выполнены заодно целое, чем достигается постоянное вращение храпового колеса при прямом и обратном .чодах шатуна 7.
Для упрощения перевода механизма привода в режим реверсивной работы каждая собачка может быть выполнена из двух шарнирно прикрепленных к водилу симметричных элементов 17 и 18, имеющих пружину 19, которая прикреплена к собачке и водилу в точках, лежаших соответственно снаружи относительно ее центра поворота и с его противоположной стороны. Нейтральное среднее положение этих собачек является не- устг)йчивым. Перевод их в то или иное рабочее положение осуществляется вручную или дистанционно при помощи пружины 19.
Механизм привода работает следующим образом.
С помощью кривошипа или эксцентрика 8 П1атун 7 приводится в движение, при ко- 5 тором связанное с ним водило 5 совершает возвратно-вращательное движение относи- те.П)НО оси xpaiKHioro колсч а 1. 11)И прямом ходе водила 5 собачка 4 входит в зацепление с ;(убом 11 храпово1Ч) колеса и вместе с ним, а значит и транспортером 2, одновременно начинает с()вер1пать рабочий ход, что обеспечивает поступательное перемепюние корма поданного на рабочую поверхность транспортера. В процессе движения собачки вместе с водилом относительно оси поворота храпового колеса выступ 10 собачки попадает под воздействие упора 9. в результате чего б,чагодаря тан1енциальному расположению рабочих поверхностей собачки и зуба относительно оси поворота собачки собачка выходит из зацепления при прямо.м ходе водила, вызывая остановку xpanoBoi o колеса и транспортера. При обратном ходе водила собачка возвращается в исходное положение и в момент остановки водила под действием пружины б вновь входит в зацепление с соответствующим зубом 11 храпового колеса, что обеспечивает подачу корма транспортером от места загрузки к .месту его выгрузки.
Регулирование величины рабочего хсхча транспортера осуществляется перемещением
0
0
5
0
5
по окружности колеса упора 9 и последующей его фиксацией в заданном положении относительно места исходного положения водила с собачкой любым известным способом (вручную или дистанционно). При этом величина рабочего хода собачки и соответствующий ей угол поворота храпового колеса ограничивается местом исходного положения собачки с одной стороны и местом выхода собачки из зацепления под действием этого упора с другой стороны.
Благодаря такому выполнению механизма привода предотвращается ударное зацепление собачки с храповым колесом и обеспечивается вход их в зацепление при нуле10
2.Механизм привода по п. 1, отличающийся тем, что в рабочем положении собачка размещена к проходящему через центр ее поворота радиусу храпового колеса под углом oL , определяемым соотнощением
(. (Г
где р - угол при верщине зуба храпового колеса, град;
tf-угол между упомянутым радиусом и радиусом, проходящим через вер- щину зуба храпового колеса, град.
3.Механизм привода по п. 1, отличающийся тем, что сопрягаемые поверхности зувой относительной скорости с соответствую- 15 бьев храпового колеса и собачки описаны
щим повьииением надежности его в работе. Формула изобретения
. Механизм привода реверсивного транспортера кормораздатчика, содержащий храповое колесо с основной ведущей подпружиненной собачкой, которая связана с щатуном и установлена с возможностью взаимодействия с подвижным вдоль зубьев храпового колеса основным упором для ограничения ее рабочего хода, отличающийся тем, что, с целью повышения надежности в работе, названный упор размещен в конце рабочего хода собачки в направлении вращения храпо20
25
радиусом из центра поворота последней.
4.Механизм привода по пп. 1-3, отличающийся тем, что храповое колесо снабжено дополнительной собачкой с упором для ограничения ее рабочего хода, которые расположены с противоположной относительно основной собачки стороны, при этом основные и дополнительные собачки и упоры соответственно присоединены к щатуну и жестко связаны между собой.
5.Механизм привода по пп. 1-4, отличающийся тем, что, с целью упрощения его перевода в режим реверсивной работы, каждая собачка выполнена из двух щарнирвого колеса, зубья которого имеют форму - но прикрепленных к водилу симметричных
равнобочной трапеции, при этом собачка установлена с возможностью прилегания к боковинам зубьев храпового колеса своим торцом, который расположен под пря.мым углом к ее продольной оси.
элементов, имеющих пружину, которая при- кре 1лена к собачке и водилу в точках, лежащих соответственно снаружи относительно ее центра поворота и с его противоположной стороны.
2.Механизм привода по п. 1, отличающийся тем, что в рабочем положении собачка размещена к проходящему через центр ее поворота радиусу храпового колеса под углом oL , определяемым соотнощением
(. (Г
где р - угол при верщине зуба храпового колеса, град;
tf-угол между упомянутым радиусом и радиусом, проходящим через вер- щину зуба храпового колеса, град.
3.Механизм привода по п. 1, отличающийся тем, что сопрягаемые поверхности зу0
5
радиусом из центра поворота последней.
4.Механизм привода по пп. 1-3, отличающийся тем, что храповое колесо снабжено дополнительной собачкой с упором для ограничения ее рабочего хода, которые расположены с противоположной относительно основной собачки стороны, при этом основные и дополнительные собачки и упоры соответственно присоединены к щатуну и жестко связаны между собой.
5.Механизм привода по пп. 1-4, отличающийся тем, что, с целью упрощения его перевода в режим реверсивной работы, каждая собачка выполнена из двух щарнирэлементов, имеющих пружину, которая при- кре 1лена к собачке и водилу в точках, лежащих соответственно снаружи относительно ее центра поворота и с его противоположной стороны.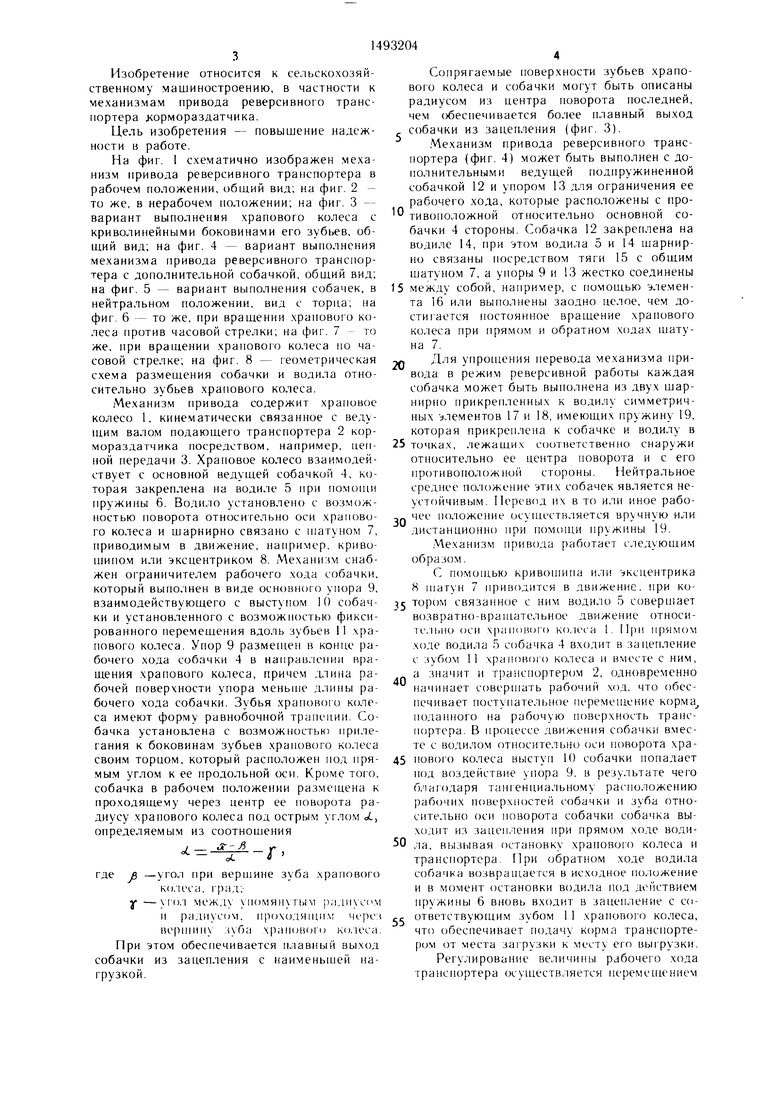
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| Механизм привода реверсивногоТРАНСпОРТЕРА КОРМОРАздАТчиКА | 1979 |
|
SU793519A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Механизм привода питателя кормов | 1987 |
|
SU1475563A1 |
| Устройство для шагового перемещения | 1988 |
|
SU1566135A1 |
| МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2150605C1 |
| Приводной механизм диапроектора | 1972 |
|
SU443354A1 |
| Станок для нанесения граней на стеклоизделия | 1983 |
|
SU1106640A1 |
| Привод конвейера | 1988 |
|
SU1535794A1 |
| Протаскивающее устройство сучко-РЕзНОй МАшиНы | 1979 |
|
SU844305A2 |

Изобретение относится к сельскохозяйственному машиностроению и обеспечивает повышение надежности в работе. Механизм привода содержит сблокированное с подающим транспортером 2 храповое колесо 1, взаимодействующее своими зубьями 11 с установленной на водиле 5 собачкой 4, имеющей выступ 10. В процессе движения собачки выступ, взаимодействуя с установленным с возможностью фиксированного перемещения вдоль трапецеидальных зубьев храпового колеса упором 9, обеспечивает ее выход из зацепления при прямом ходе водила. Для этого упор установлен перед местом исходного положения собачки по направлению вращения храпового колеса. При обратном ходе последнего собачка возвращается в исходное положение и в момент его полной остановки снова входит в зацепление с соответствующим зубом храпового колеса. При таком выполнении механизма осуществляется безударное зацепление собачки с храповым колесом благодаря их нулевой относительной скорости в этот момент. 4 з.п. ф-лы, 8 ил.
7
сриг.2
Q
Фи.д
tg
17
Фиг.6
(Риг.1
| Питатель раздатчика стебельчатых кормов | 1981 |
|
SU1005740A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм привода реверсивногоТРАНСпОРТЕРА КОРМОРАздАТчиКА | 1979 |
|
SU793519A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
