упоров 5 захваты 4 для изделий (И) 1. На основании смонтирована подъемная платформа (ПП) 7 с двухпозиционными фиксаторами (ДФ) 6, выполненными в виде размещенных в корпусе подвижных вдоль своей оси подпружиненных штоков 14. Корпус каждого ДФ 6 выполнен в виде втулки с профильным пазом. Нижняя кромка относительно верхней кромки в каждой верхней части паза смещена в одну сторону, а в каждой нижней части - в другую. Шток 14 имеет палец, размещенный в профильном пазу втулки, и смонтированный на верхнем конце подпружиненный наконечник. При этом каждый ДФ б закреплен на ПП 7 с возможностью вертикального перемещения и фиксации. При навешивании И1 поднимается ПП 7 и поворачивает захваты 4. После выхода захватов 4 из взаимодействия с И 1 они возвращаются в исходное положение. После опускания ПП 7 вниз И 1 подается на захваты 4. При навешивании И 1 наконечник ДФ 6 находится в нижнем положении. При съеме И 1 опускается ПП 7 и происходит переключение наконечника ДФ 6 в верхнее положение взаимодействием штока 14 с основанием. При подъеме ПП 7 с И 1 захваты 4 приподнимаются наконечниками штоков 14 ДФ 6. Затем каждый из захватов 4 поворачивается наконечником ДФ 6 и выходит из взаимодействия с дном И 1, упираясь в его боковые поверхности. При опускании ПП 7 с И 1 захваты 4 скользят по боковым поверхностям И 1. Когда И 1 выходит из взаимодействия с захватами 4, они занимают исходное положение, а И 1 остается на ПП 7 ниже захватов 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 2007 |
|
RU2335448C1 |
| Дозатор | 1989 |
|
SU1758436A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1983 |
|
SU1127839A1 |
| Захватное устройство для изделий с внутренней полостью | 1990 |
|
SU1771464A3 |
| Устройство для выпрессовки гильз из блоков цилиндров двигателей | 1988 |
|
SU1516294A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1990 |
|
SU1749156A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 1990 |
|
RU2034768C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Устройство для удаления облоя | 1986 |
|
SU1362640A2 |
| Грузозахватная система | 1990 |
|
SU1787918A1 |
Изобретение относится к вспомогательному оборудованию для подвесных конвейеров и может найти применение для навески или съема изделий. Цель - повышение надежности работы уа. На подвесном конвейере установлены П-образные подвески 2. В нижней части подвесок 2 на осях 3 установлены поворотные до упоров 5 захваты 4 для изделий (И) 1. На основании смонтирована подъемная платформа (ПП) 7 с двухпозиционными фиксаторами (ДФ) 6, выполненными в виде размещенных в корпусе подвижных вдоль своей оси подпружиненных штоков 14. Корпус каждого ДФ 6 выполнен в виде втулки с профильным пазом. Нижняя кромка относительно верхней кромки в каждой верхней части паза смещена в одну сторону, а в каждой нижней части - в другую. Шток 14 имеет палец, размещенный в профильном пазу втулки и смонтированный на верхнем конце подпружиненный наконечник. При этом каждый ДФ 6 закреплен на ПП 7 с возможностью вертикального перемещения и фиксации. При навешивании И 1 поднимается ПП 7 и поворачивает захваты 4. После выхода захватов 4 из взаимодействия с И 1 они возвращаются в исходное положение. После опускания ПП 7 вниз И 1 подается на захваты 4. При навешивании И 1 наконечник ДФ 6 находится в нижнем положении. При съеме И 1 опускается ПП 7 и происходит переключение наконечника ДФ 6 в верхнее положение взаимодействием штока 14 с основанием. При подъеме ПП 7 с И 1 захваты 4 приподнимаются наконечниками штоков 14 ДФ 6. Затем каждый из захватов 4 поворачивается наконечником ДФ 6 и выходит из взаимодействия с дном И 1, упираясь в его боковые поверхности. При опускании ПП 7 с И 1 захваты 4 скользят по боковым поверхностям И 1. Когда И 1 выходит из взаимодействия с захватами 4, они занимают исходное положение, а И 1 остается на ПП 7 ниже захватов 4.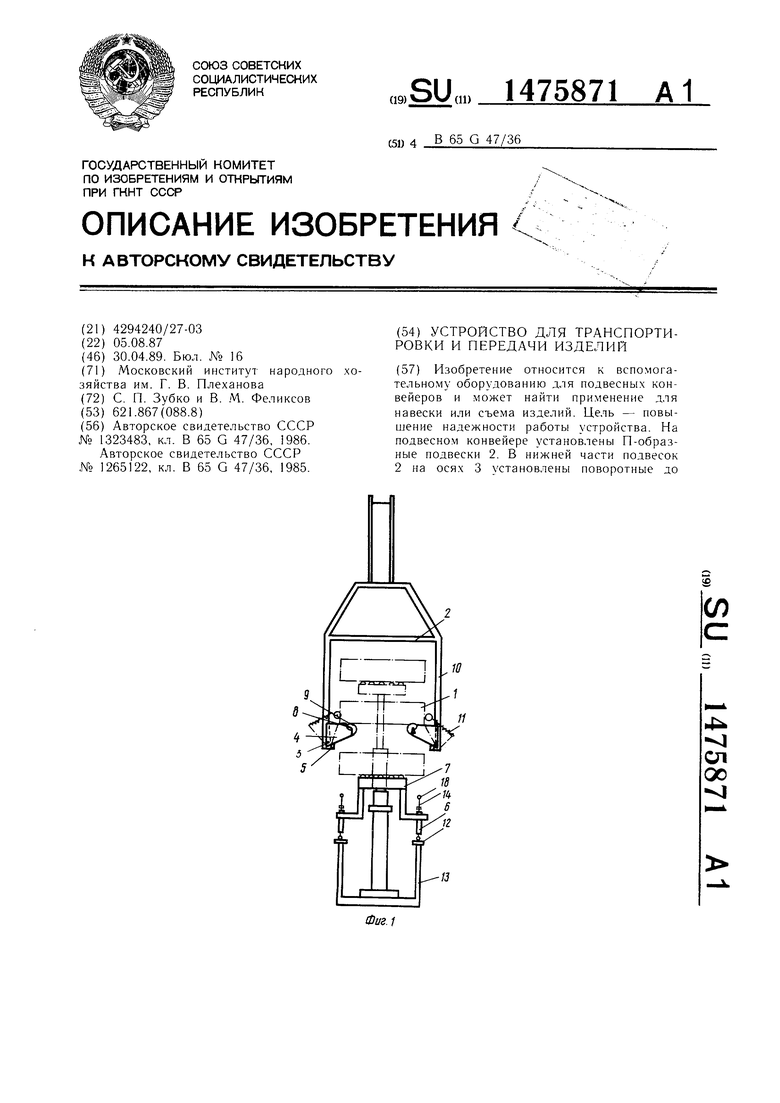
1
Изобретение относится к вспомогательному оборудованию для подвесных конвейеров и может найти применение для навешивания или съема изделий, например контейнеров, на подвески подвесного грузо- несущего конвейера в различных отраслях промышленности.
Цель изобретения - повышение надежности работы устройства.
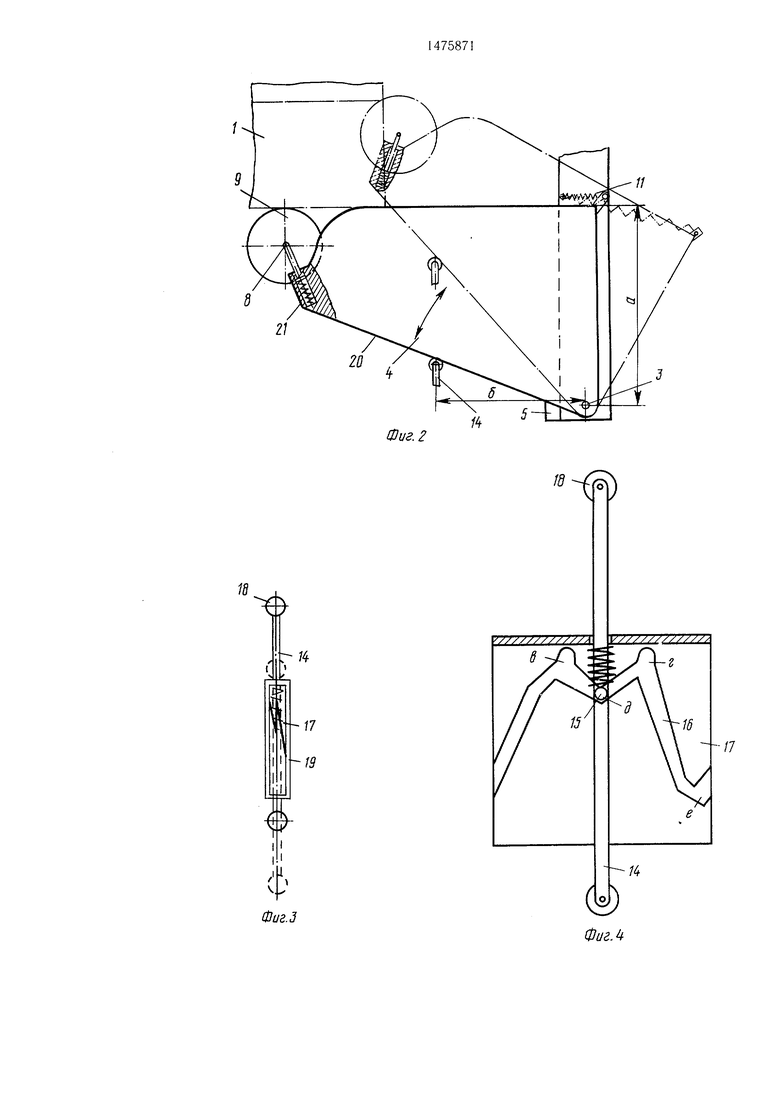
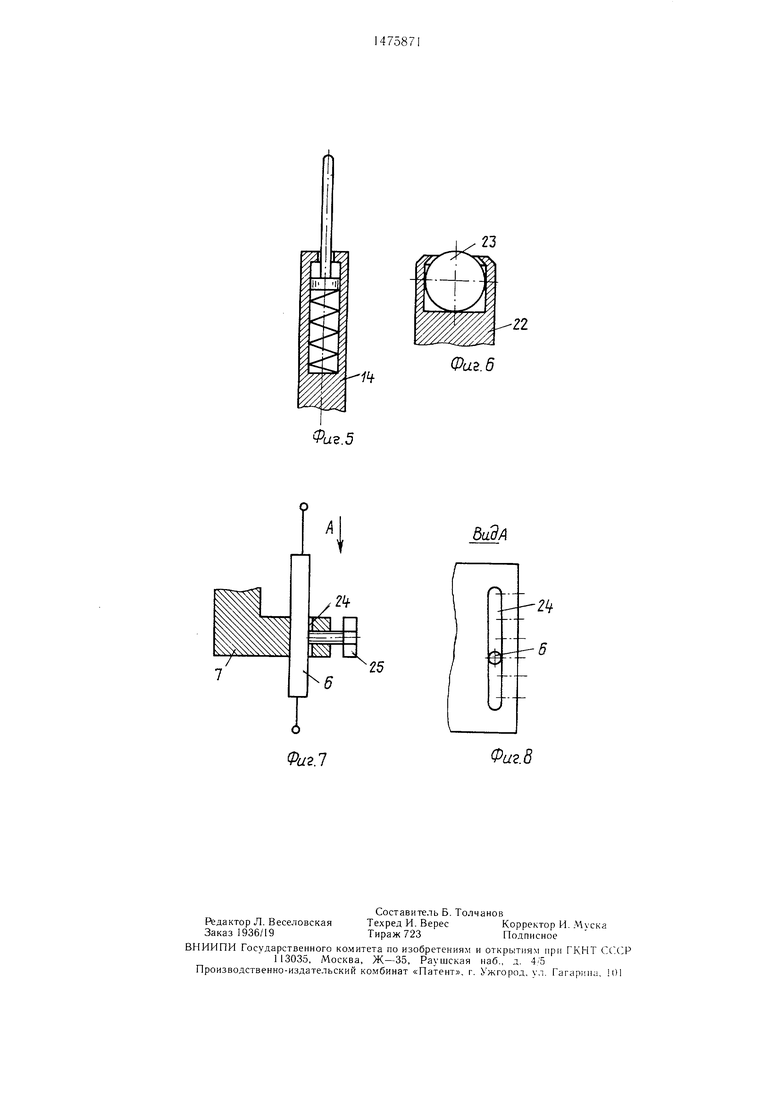
На фиг. 1 изображено предлагаемое устройство для навешивания и съема изделий с конвейера; на фиг. 2 - захват для изделия; на фиг. 3 - двухпозиционный фиксатор, общий вид; на фиг. 4 - то же, со втулкой в развернутом состоянии (обойма условно не показана); на фиг. 5 - верхний конец штока с вмонтированным подпружиненным наконечником; на фиг. 6 - свободно установленная на конце наконечника сфера; на фиг. 7 - монтаж двухпозици- онного фиксатора; на фиг. 8 - вид А на фиг. 7.
Устройство для транспортировки и передачи изделий 1 содержит конвейер с П-об- разными подвесками 2 с расположенными в нижней части на осях 3 захватами 4, установленными с возможностью поворота в вертикальной плоскости до упоров 5 и с возможностью взаимодействия с вертикальными элементами в виде двухпозиционных фиксаторов 6 подъемной платформы 7, смонтированной на основании. На консольных концах захватов 4 на осях 8 установлены ролики 9 для взаимодействия с изделием 1, причем захваты 4 связаны с вертикальными частями 10 П-образной подвески пружинами 11 растяжения, а двухпозиционные фиксаторы 6, установленные с возможностью переключения своего положения в опущен2
ном состоянии подъемной платформы - с упорами 12, установленными на неподвижной части 13 платформы 7, т.е. с основанием. Двухпозициоиный фиксатор 6 содержит подпружиненный шток 14 с пальцем 15, установленным с возможностью взаимодействия с пазом 16 втулки 17, являющейся корпусом. Шток 14 при переключении может вращаться. При заключении втулки 17 в дополнительную обойму 19 шток 14 не вращается и поэтому может иметь наконечник на верхнем конце в виде ролика 18. При этом шток 14 выполняется профильным (с пазом или другим элементом, используемым в технике для предотвращения вращения), а в неподвижной обойме выпол5 няется соответствующий профилю паз (палец и т.п.). Оси 8 могут быть установлены как на стержнях (фиг. 2), так и непосредственно в пазах захватов.
0При проектировании устройства необходимо обеспечить близость скоростей подъема изделия и вертикальной составляющей поворота захвата 4 путем подбора соотношения размеров а и б (фиг. 2), а также формы профиля нижней поверхности 20 захва5 та 4 на участке взаимодействия ее со штоком 14 (она может быть и прямолинейной, как на фиг. 2).
Ось 8 ролика 9 связана с пружиной 21. Наконечник может быть подпружинен (фиг. 5), при этом в конце 22 наконечника
0 рекомендуется свободно устанавливать сферу 23. Двухпозиционные фиксаторы имеют возможность регулированного перемещения в вертикальном и горизонтальном направлениях, а также фиксации, для этого в подъемной платформе 7 выполнены пазы
24, в которые установлены двухпозиционные фиксаторы 6, закрепляемые винтами 25.
Нижняя кромка профильного паза двух- позиционного фиксатора 6 смещена в каждой верхней части (в, г) паза относительно верхней кромки в одну сторону, а в каждой нижней части (д, е) - в другую.
На платформе 7 может быть установлен по ее оси один двухпозиционный фиксатор 6 (вместо двух, как на фиг. 1), на конце штока которого вместо наконечника необходимо закрепить горизонтальную планку с вертикальными наконечниками, занимающими положение наконечников двух фиксаторов 6.
Устройство работает следующим образом.
При навешивании изделий палец 15 двух- позиционного фиксатора 6 находится в точке е паза 16, т.е. наконечник находится в своем нижнем положении. При подъеме платформы 7 изделие 1 соприкасается с захватами 4 и постепенно разворачивает их до тех пор, пока они не выйдут из соприкосновения с изделием, после чего захваты 4 под действием пружин 11 возвращаются в свое первоначальное положение в контакте с наконечником. Дойдя до своего верхнего положения, платформа 7 с изделием I начинает перемещаться вниз. При этом изделие 1 ложится на захваты 4, а платформа опускается.
При съеме изделий палец 15 двухпози- ционного фиксатора 6 находится в точке д паза 16, т.е. наконечник находится в своем верхнем положении. Переключение положения наконечника двухпозицонного фиксатора осуществляется при опускании платформы 7, когда шток 14 контактирует с упором 12 неподвижной части 13 платформы 7. При подъеме платформы 7 каждый двухпозиционный фиксатор 6 входит в соприкосновение с захватом 4 в тот момент (или немного позже), когда опорная поверхность подъемной платформы 7 входит в соприкосновение с изделием 1. Далее платформа 7 поднимается вместе с изделием 1, одновременно под воздействием каждого двухпо- зиционного фиксатора 6 поднимаются (поворачиваются) и захваты 4. В положении, изображенном штрихпунктирной линией на фиг. 2, ролики 9 находятся в состоянии неустойчивого равновесия (пружины, связанные с осью 8, сжаты). При дальнейшем подъеме платформы 7 каждый захват 4 поворачивается наконечником двухпозиционного фиксатора 6. При этом ролик 9 выходит под действием пружины 21 из состояния
неустойчивого равновесия, поворачиваясь на
оси 8, рывком занимая верхнее положение.
Аналогичное воздействие на захват 4
происходит и в том случае, когда наконечник встроен в верхний конец штока 14. Пружина под наконечником при повороте захвата сначала сжимается, а затем рывком поворачивает захват, и последний оказывается сбоку от изделия 1. Дойдя до
0 своего верхнего положения, платформа 7 с изделием 1 начинает перемещаться вниз. При этом захват 4 пружиной 1 1 посредством ролика 9 входит в контакт с боковой поверхностью изделия 1 (ролик, проворачиваясь на оси 8, катится по боковой
5 поверхности изделия), а затем занимает свое исходное положение, контактируя с упором 5, а изделие I опускается на платформу 7. При этом снова происходит переключение положение штока 14 двухпозиционного фиксатора 6.
Формула изобретения
5 с П-образными подвесками, в нижней части которых на осях установлены поворотные до упоров в вертикальной плоскости захваты для изделий, и смонтированную на основании подъемную платформу с установленными на ней с возможностью взаимодействия с
0 захватами двухпозиционными фиксаторами, выполненными в виде размещенных в корпусе подвижных вдоль своей оси подпружиненных штоков, отличающееся тем. что, с целью повышения надежности работы устройства, корпус каждого двухпозицнон5 ного фиксатора выполнен в виде втулки с профильным пазом, нижняя кромка которого относительно верхней кромки в каждой верхней части паза смещена в одну сторону, а в каждой нижней части - в другую, при этом каждый подпружиненный шток имеет палец, размещенный в профильном пазу втулки, и смонтированный на верхнем конце подпружиненный наконечник, причем двухпозиционные фиксаторы установлены на подъемной платформе с возможностью пере5 ключения своего положения в опущенном состоянии подъемной платформы при взаимодействии подпружиненного штока с основанием.
0 закреплен на подъемной платформе с возможностью вертикального перемещения и фиксации.
0
21
-п
Фиг. 2
17
Фаъ.5
Фаг
Фиг. 6
ВидА
-2Ь
6
Фи.8
