(54) СПОСОБ КОНТРОЛЯ ГРАНИЦЫ УГОЛЬ-ПОРОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый исполнительный орган шнекобуровой машины | 1977 |
|
SU720146A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления | 1980 |
|
SU977770A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Система дистанционного контроля и управления комбайном в угольном пласте | 1979 |
|
SU876997A1 |
| Система автоматического управления исполнительными органами угледобывающей машины | 1979 |
|
SU945426A1 |
| Способ контроля границы "уголь-порода | 1980 |
|
SU891914A1 |
| Способ автоматического управления режущими органами очистного комбайна | 1986 |
|
SU1472670A1 |
| ШЭПАИ I ПАТЕНТНО- *г, I | 1969 |
|
SU250827A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
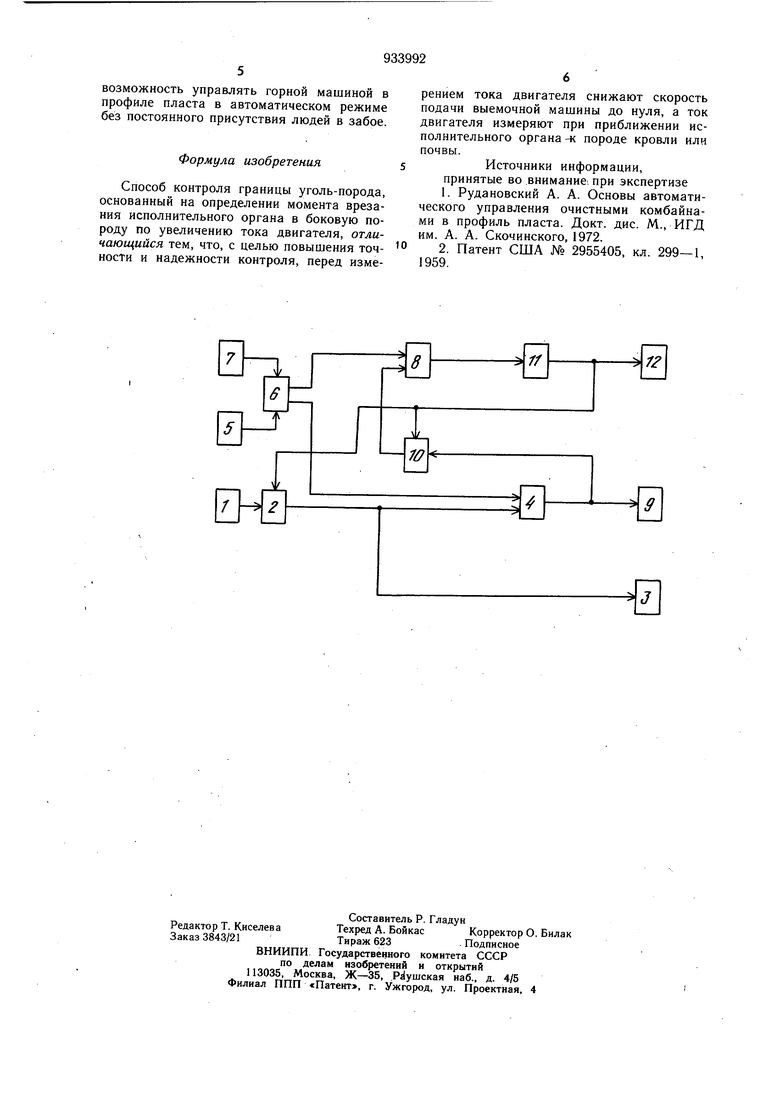
Изобретение предназначено для контроля границы уголь-порода при управлении горными машинами в профиле пласта в забоях, где вмешающиеся боковые породы имеют отличаюшиеся от угля физико-механические свойства, например крепость разнящуюся на величину, достаточную как для надежного распознавания угля и породы, так и для качественного автоматического управления горной машиной и может быть использовано на выемочных машинах, работаюших в составе гидрофицированных угледобыв юших комплексов без постоянного присутствия людей в забое. Известны способы контроля, основанные на распознавании границы уголь-порода на основе различия их химических, физических или механических свойств. Устройства, их реализующие, позволяют с помошью специально для этой цели разработанных и установленных на машине датчиков измерять плотность контролируемых сред, содержание в них углерода, золы, их диэлектрическую проницаемость или тангенс угла потерь, акустическую проводимость или их крепость, определять соотношение измеряемых параметров и во время движения горной машины управлять ее исполнительными органами в профиле пласта 1. Недостатком известных способов при их реализации является наличие, обычно на исполнительном органе горной машины, специального датчика, требующего специального канала передачи информации с вращающегося исполнительного органа на невращающуюся часть машины, что является одной из главных причин нн-зкой надежности всей системы управления того или иного способа контроля границы уголь-порода, а также низкая точность контроля вследствие замера контролируемых параметров на ходу во время движения горной машины датчиком на исполнительном органе. Известен способ, в котором границу уголь-порода контролируют следующим образом. На верхней части выемочной машины устанавливают специальный режущий орган барабанного типа, приводимый в действие отдельным электродвигателем; во время движения машины по лаве замеряют мощность двигателя, потребляемую двигателем при срезании верхней части пласта угля; при приближении исполнительного органа машины вследствие ее естественного ухода в породе кровли, по твердости превышающей уголь, по индикатору определяют изменение в потреблении двигателем энергии, и следователыэ, изменение условий, необходимых для резания соседней с пластом породы. Затем изменяют вертикальный курс машины для того, чтобы избежать сталкивание исполнительного органа машины с более твердым слоем и оставить машину в пласте угля. Аналогично управляют исполнительным органом машины, идущим по почве пласта и имеющим свой измерительный барабан с электродвигателем 2. Существенными недостатками известного способа являются низкая точность и малая надежность системы контроля границы уголь-порода. Установка специального режущего органа барабанного типа, снимающего оставляемую исполнительным органом мащины пачку угля, при изменяющейся скорости подачи не позволяет по току двигателя однозначно судить о виде разрущаемого материала. Точность контроля границы угольпорода еще больще снижается при появлении в разрушаемой пачке угля всякого рода включений и особенно прослоек породы, приводящих к значительному изменению усилий резания и, естественно, тока двигателя. Цель изобретения - повыщение точности и надежности контрЪля границы угольпорода. Поставленная цель достигается тем, что согласно способу, основанному на определении момента врезания исполнительного органа в боковую породу по увеличению тока двигателя, перед измерением тока двигателя снижают скорость подачи выемочной машины до нуля, а ток двигателя измеряют при приближении исполнительного органа к породе кровли или почвы. На чертеже представлено устройство, реализующее способ. Устройство состоит из блока 1 зондирования, представляющее собой регулируемое от 10 до 100 с реле времени; блока 2 памяти, выполненного на триггерах, исполнительного элемента 3, схемы И 4, датчика 5 тока и соединенных с ним блока б сравнения и задатчика 7 тока, схему И 8, исполнительного элемента 9 и блока 10 памяти регулируемого от 0,5 до 3 с реле 11 времени и соединенного с ним исполнительного элемента 12. Способ осуществляется следующим образом. Через заданные промежутки времени блок 1 зондирования выдает исполнительному элементу 3 команду на уменьщение скорости подачи, которая предварительно заполняется в блоке 2 памяти. Одновременно эта же команда из блока 2 памяти поступает На один из выходов схем И 4, стоящей в цепи подвода исполнительного органа горной мащины к границе уголь-порода. Так как в момент включения блока 1 зондирования, горная мащина находится под нагрузкой, ток ее двигателя большой и сигнал с датчика 5 тока значительно больще уставки задатчика 7 тока и блок б сравнения выдает сигнал «Больше на один из входов схемы И 8. По мере уменьшения скорости подачи горной машины в результате действия команды на исполнительный элемент 3, происходит снижение нагрузки на приводе, что естественно, приводит к уменьшению тока двигателя и появлению на выходе блока б сравнения сигнала «Меньше, поступающего на второй вход схемы И 4. , Происходит включение исполнительного элемента 9 и начинается подвод исполнительного органа к породе кровли или почвы пласта. Эта команда через блок 10 памяти поступает на второй вход схемы И 8. В процессе, подвода исполнительный орган может встретить пачку угля, на срезание которой требуется усилие меньще, чем на породу. Так как уставка задатчика 7 тока больще тока, потребляемого двигателем на прорезание угля, исполнительный орган продолжает движение до встречи с породой, т. е. до тех пор, пока ток двигателя 5 станет больше тока уставки 7 блока. В связи с изменением сигнала в блоке б сравнения со значения «Меньше на «Больще выключения схемы И-4, произойдет остановка исполнительного оргайа и его включение в другую сторону после срабатывания схемы И 8, реле 11 време «4 и исполнительного элемента 12, одновремеА ио происходит гащение информации в блоках 2 и 10 памяти и снятие их выходного сигнала со схемы И 4 и 8, позволяющее увеличить скорость комбайна до заданной. Время движения исполнительного органа от границы порода-уголь задается реле 11 времени. После прихода нового сигнала от устройства 1 зондирования цикл повторяется. Использование способа контроля границы уголь-порода обеспечивает по сравнению с существующими способами следующие преимущества: а)исключается необходимость установки на режущих органах датчиков и устройств передачи информации на корпус комбайна; б)повышается точность и надежность контроля границы уголь-порода, что дает
возможность управлять горной машиной в профиле пласта в автоматическом режиме без постоянного присутствия людей в забое.
Формула изобретения
Способ контроля границы уголь-порода, основанный на определении момента врезания исполнительного органа в боковую породу по увеличению тока двигателя, отличающийся тем, что, с целью повышения точности и надежности контроля, перед измерением тока двигателя снижают скорость подачи выемочной машины до нуля, а ток двигателя измеряют при приближении исполнительного органа -к породе кровли или почвы.
Источники информации, принятые во .внимание, при экспертизе
