Изобретение относится к лазерной технике и предназначено для формирования лазерного информационного поля для систем телеориентации, навигации и оптической связи, в системах управления автоматическими подвижными аппаратами. Изобретение может быть использовано при управлении, посадке и стыковке летательных аппаратов, корректировке траектории полета самонаводящихся снарядов и ракет, проводке судов по сложным фарватерам, дистанционном управлении робототехническими устройствами.
Для формирования информационного поля (ИП) лазерной системы телеориентации (ЛСТ) широко используется способ, основанный на пространственном кодировании светового поля модулирующим растром (заявка Великобритании №1395246, заявл. 17.10.72 г., опубл. 21.05.75 г., НКИ H4D, кл. G01S 1/70). Однако такому способу и аппаратуре, его реализующей, присущи значительные световые потери на модулирующем растре, а закон кодирования информационного поля определяется типом модулирующего растра.
Более совершенным является способ, основанный на поэлементном сканировании лазерного пучка с "иглообразной" диаграммой направленности (заявка Великобритании №2133652, заявл. 14.11.83 г., №8330302, опубл. 24.07.84 г., кл. F41G 7/00, НКИ H4D; патент RU №2093849, приоритет 13.12.1995, МПК G01S 1/70, 17/87). В таком способе лазерный пучок совершает возвратно-поступательное сканирование вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем, после заполнения лазерным излучением прямоугольного растра, направление сканирования меняется на ортогональное. Выделение координат управляемого объекта в ИП ЛСТ основано на измерении временного интервала между двумя принимаемыми лазерными сигналами во время возвратно-поступательного сканирования лазерного пучка. Световые потери при этом определяются эффективностью дефлекторов (сканеров), а наличие "иглообразной" диаграммы направленности лазера обеспечивает более высокую плотность лазерного излучения, чем у лазерных систем с пространственным кодированием светового поля модулирующим растром и, следовательно, более высокое отношение сигнал/шум в фотоприемном устройстве управляемого изделия.
Недостатком способа является невозможность передачи ЛСТ дополнительной информации, необходимой для оптимального управления объектом, которая должна передаваться на объект управления независимо от его местоположения в информационном поле. В качестве такой информации могут быть, например, командные сигналы, меняющие коэффициент усиления в контуре передачи управляемого объекта и связанные, например, с наличием угловой скорости сопровождения за счет движения линии визирования, ветровым воздействием и т.д.
Наиболее близким к заявляемому техническому решению является способ, основанный на поочередном формировании двух прямоугольных ортогональных информационных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам с числом тактов сканирования в строке, равном трем, с заданными задержками между тактами, встречном сканировании двух соседних тактов и равном времени задержки между ними для первого и второго растров, после формирования Р информационных растров формируют S командных растров, у которых в каждом такте одинаковое направление сканирования по строке, временной интервал между первым и вторым тактами пропорционален величине передаваемой команды (патент RU №2099730, приоритет 01.03.1996, МПК G01S 1/70, G02F 1/11, прототип).
Недостатком способа является увеличение световых потерь и уменьшение отношения сигнал/шум при повышении частоты повторения информационных и командных растров. При повышении частоты уменьшается время формирования такта каждой строки, а время необходимых гашений лазерного луча на временные задержки между тактами строк остается постоянным, так как оно обусловлено способом формирования растра и техническими характеристиками аппаратуры, реализующей данный способ.
Техническим результатом предлагаемого изобретения является повышение информативности лазерной системы телеориентации за счет повышения частоты повторения информационных и командных растров в информационном поле ЛСТ путем уменьшения длительности временных задержек между тактами и снижения световых потерь.
Технический результат достигается тем, что в известном способе формирования ИП ЛСТ, основанном на поочередном формировании Р пар прямоугольных ортогональных информационных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам с числом тактов сканирования в строке, равном трем, и встречном направлении сканирования двух соседних тактов, с временем сканирования такта ТС и формировании S командных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам с числом тактов сканирования в строке, равном трем, у которых в каждом такте выбрано одинаковое направление сканирования по строкам, временной интервал между первым и вторым тактами эквивалентен величине передаваемой команды, а временные задержки между вторыми и третьими тактами, являющиеся признаками типа растра, различны для каждого из информационных и командных растров, одновременно формируют две строки растра, сдвинутые относительно друг друга на N/4 строк, для этого поочередно формируют одиночные такты в первой и затем во второй строках, причем при формировании информационных растров, после формирования второго такта второй строки, вводят временную задержку, являющуюся признаком информационного кадра, а при формировании командных растров, после формирования первого такта второй строки, вводят временную задержку ΔТ=0…ТС, эквивалентную величине передаваемой команды, после формирования второго такта второй строки вводят временную задержку, равную сумме временных задержек - временной задержки, являющейся признаком командного растра, и величины (ТС-ΔТ), и сдвигают следующую пару вновь формируемых строк относительно сформированной пары строк на N/4 строки.
Одновременное формирование двух строк информационного растра, сдвинутых относительно друг друга на N/4 строк, путем поочередного формирования одиночных тактов в первой и затем во второй строках, введение временной задержки, являющейся признаком информационного кадра, после формирования второго такта второй строки, введение после формирования первого такта второй строки командных растров временной задержки ΔТK=0…ТC, эквивалентной величине передаваемой команды, и введение после формирования второго такта второй строки командных растров временной задержки, равной сумме временных задержек - временной задержки, являющейся признаком командного растра, и величины (ТС-ΔТK), а также сдвиг следующей пары вновь формируемых строк относительно сформированной пары строк на N/4 строки позволили повысить информативность лазерной системы телеориентации за счет повышения частоты передачи информационного поля лазерной системы телеориентации путем уменьшения длительности временных задержек между тактами и снижения световых потерь.
Заявителем и авторами не обнаружено в патентной и научно-технической литературе ЛСТ, выполненных подобным образом.
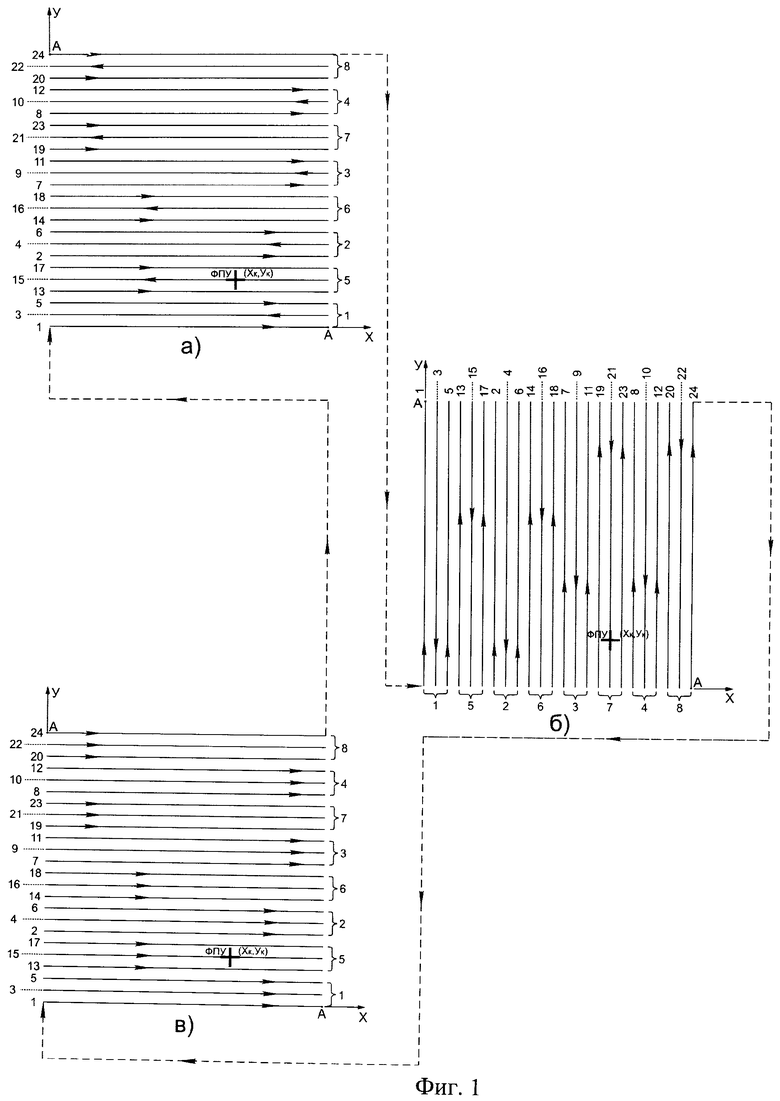
На фиг.1 представлена траектория движения лазерного пучка при формировании двух информационных (ИК) (фиг.1а) и 1б)) и одного командного кадров (КК) (растров) ИП (фиг.1в)) для случая восьми строк и трех тактов в каждой строке. На фиг.1 справа или снизу приведены номера строк (от 1 до 8), слева или сверху приведены номера тактов (от 1 до 24), показывающие пространственное положение каждого такта строк (и каждой строки) в соответствующем растре, а также условное положение фотоприемного устройства (ФПУ) управляемого объекта в лазерном растре, имеющего координаты ХК и YК и расположенного на пересечении пятой горизонтальной и седьмой вертикальной строк. Три такта сканирования в каждой строке для удобства изображения пространственно разнесены. Линейные размеры кадров равны А×А.
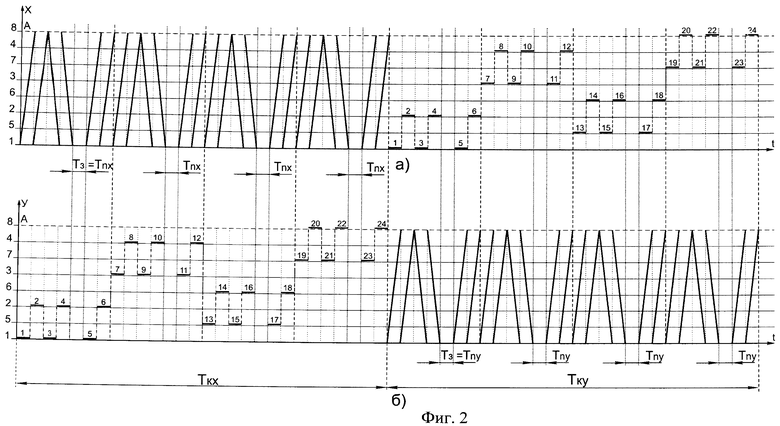
На фиг.2 представлены временные эпюры положения лазерного пучка по горизонтальной координате Х (фиг.2а)) и по вертикальной координате Y (фиг.2б)) при формировании двух информационных растров, содержащих по восемь строк. Слева на эпюрах указаны номера строк, определяющие их пространственное положение в растре. На эпюрах приведены номера тактов (от 1 до 24), показывающие пространственное положение каждого такта строк в каждом растре.
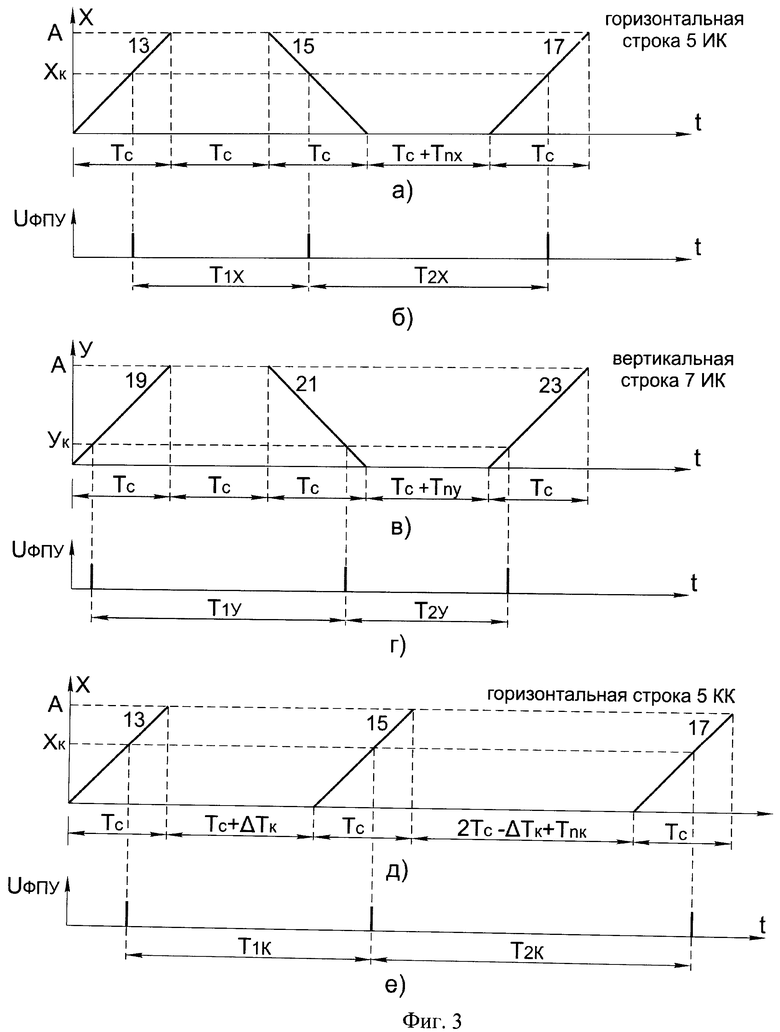
На фиг.3а), 3в) и 3д) представлены временные эпюры положения лазерного пучка по горизонтальной строке 5 и вертикальной строке 7 информационных кадров и горизонтальной строке 5 командного кадра, на которых, согласно фиг.1, расположено фотоприемное устройства (ФПУ) управляемого объекта. На фиг.3б), 3г) и 3е) представлены временные эпюры выходных импульсов Uфпу фотоприемного устройства управляемого объекта, имеющего координаты ХК и YК в лазерном растре и расположенного на пересечении пятой горизонтальной и седьмой вертикальной строк. На временных эпюрах положения лазерного пучка по строке указаны номера тактов, образующих используемую строку. Для горизонтальной строки 5 информационного кадра это такты 13, 15 и 17. Для вертикальной строки 7 информационного кадра это такты 19, 21 и 23. Для горизонтальной строки 5 командного кадра это такты 13, 15 и 17.
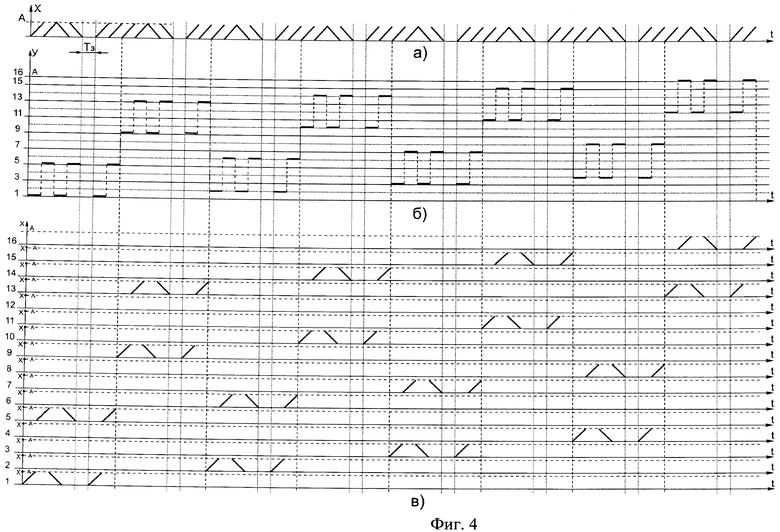
На фиг.4а) представлена временная эпюра положения лазерного пучка по горизонтальной координате при формировании одного более сложного информационного растра, содержащего 16 строк. Временные эпюры положения лазерного пучка по строкам и положение лазерного пучка по горизонтальной координате для каждой строки при формировании одного информационного растра, содержащего 16 строк, условно представлены на фиг.4б) и фиг.4в).
Способ осуществляется следующим образом.
При формировании каждого из информационных и командного кадров лазерный пучок формируют такты, как представлено на фиг.1. Каждый такт относительно предыдущего смещается на N/4=2 строки по координате, ортогональной направлению сканирования по строке. После завершения шести тактов, например 1…6, сформированы две строки - первая и вторая, разнесенные по координате, ортогональной направлению сканирования по строке, также на N/4=2 строки. Далее начинается формирование двух следующих строк - третьей и четвертой.
Время сканирования каждого из тактов по строке одинаково и равно ТС. При формировании информационных кадров временные задержки ТЗ в строках (фиг.2) вводятся только после формирования двух тактов двух одновременно формируемых строк. Например, при одновременном формировании первой и второй строк ИК (фиг.1а)) формируются 1, 2, 3 и 4 такты первой и второй строк, затем гасится лазерное излучение на время ТЗ, и далее формируются 5 и 6 такты первой и второй строк ИК. Величины задержек для ИК с горизонтальными и вертикальными строками различны и равны, соответственно, ТПХ и ТПУ. Эти величины являются признаком горизонтальных или вертикальных кадров. Для каждой строки временная эпюра положения лазерного пучка по строке (фиг.2 и фиг.4а), 4в)) представляет собой три такта. Временная задержка между первым и вторым тактами равна ТС (так как в это время, например, для пятой строки ИК, согласно фиг.2б), между 13 и 15 тактами пятой строки формируется такт 14 шестой строки). Временная задержка между вторым и третьим тактами равна (ТС+ТПХ) или (ТС+ТПУ). Она равна времени ТС сканирования одного такта в другой строке (для пятой строки ИК это формирование 16 такта шестой строки) и времени гашения лазерного луча ТПХ или ТПУ.
При формировании командных кадров (фиг.1в)), в которых направление сканирования по тактам имеет одинаковое направление, первая временная задержка ΔТК в строках (гашение лазерного излучения) (фиг.3д)) вводится после формирования первого такта двух одновременно формируемых строк, а вторая задержка (ТС-ΔТК+ТПК) вводится после формирования двух тактов двух одновременно формируемых строк.
Частота повторения командных кадров, как правило, в 5-10 раз меньше частоты повторения информационных кадров. Командные кадры, как правило, имеют два признака: один признак для передачи поправок по горизонтали, а второй признак для передачи поправок по вертикали.
При облучении фотоприемного устройства (ФПУ) управляемого объекта, находящегося в точке ИП с координатами ХК и YК и расположенного на пересечении пятой горизонтальной и седьмой вертикальной строк (фиг.1)), лазерным пучком во время строчного сканирования ФПУ формирует три импульса (фиг.3б), 3г), 3е)).
Для информационных кадров временной интервал T1Х,1Y между первыми двумя импульсами определяет величину координаты ФПУ в ИП, а временной интервал (T1X,1Y+Т2X,2Y) между первым и третьим импульсами - ее признак (X или Y). Длительность временного интервала T1X,1Y может меняться от ТC до 3ТC. Как следует из фиг.3а) и 3в), суммарная длительность Т∑X, ∑Y интервалов T1 и T2 для информационных кадров равна: T∑X=(4TC+ТПХ) или Т∑Y=(4ТC+ТПУ).
Для командного кадра временной интервал Т1К между первым и вторым импульсами определяет величину передаваемой команды ΔТК, временной интервал (Т1К+Т2К) между первым и третьим импульсами определяет признак передачи команды. Для командного кадра величина временного интервала Т1К не зависит от местоположения ФПУ в ИП и определяется величиной временной задержки ΔТК, вводимой при формировании первого и второго тактов сроки. Длительность временного интервала Т1К может меняться от 2ТС до 3ТС. Как следует из фиг.3д), суммарная длительность Т∑К интервалов Т1К и Т2К для командного кадра равна Т∑К=(5ТС+ТПК).
Местоположение ФПУ в ИП относительно центра ИП определяется, например, выражением:  , где А - линейный размер ИП, T1X,1Y - время между первым и вторым импульсами ФПУ, ТC - время сканирования одного такта строки.
, где А - линейный размер ИП, T1X,1Y - время между первым и вторым импульсами ФПУ, ТC - время сканирования одного такта строки.
Величина принятой дополнительной команды Uд может определяться, например, выражением: Uд=Т1К-ТС=ΔTК.
Признак измеренной координаты XК и YК или командного сигнала Uд определяется временным интервалом между первым и третьим импульсами ФПУ, которые для горизонтальных и вертикальных строк информационного кадра или для командного кадра равны соответственно: (4ТС+ТПХ), (4ТС+ТПУ) или (5ТС+ТПК).
Величины задержек ТПХ,ПУ,ПК, являющиеся признаком горизонтальных информационных, вертикальных информационных или командных кадров, могут быть заданы следующими значениями: ТПХ=5 мкс, ТПУ=15 мкс, ТПК1=5 мкс, ТПК2=15 мкс, где ТПК1 и ТПК2 - признаки первого и второго командных кадров. Временной интервал ΔТПС между соседними признаками для данного примера равен 10 мкс. Так как принимаемые импульсы ФПУ флюктуируют по времени, обычно задают доверительный интервал приема сигнала. Длительность времени ожидания приема третьего импульса признака ΔТПХ,ПУ,ПК можно положить равной ±0,4ΔТПС относительно центрального значения.
Отметим, что информация о положении ФПУ в ИП или передаваемой величине команд также содержится в длительности временного интервала между вторым и третьим импульсами ФПУ. Местоположение ФПУ в ИП относительно центра ИП определяется при этом выражением:  , где А - линейный размер ИП, Т2 - время между вторым и третьим импульсами ФПУ, ТС - время сканирования одного такта строки. Величина принятой дополнительной команды Uд, при измерении временного интервала между вторым и третьим импульсами ФПУ, может определяться, например, выражением:
, где А - линейный размер ИП, Т2 - время между вторым и третьим импульсами ФПУ, ТС - время сканирования одного такта строки. Величина принятой дополнительной команды Uд, при измерении временного интервала между вторым и третьим импульсами ФПУ, может определяться, например, выражением:
Uд=2ТC+ТПК-Т2К=ΔТК.
При вычислении среднего значения данных, определенных по временным интервалам между первым и вторым и между вторым и третьим импульсами ФПУ, среднеквадратическая ошибка полученных осредненных данных будет уменьшена примерно в 1,4 раза относительно одиночных измерений, что увеличивает информативность системы телеориентации (Б.Р.Левин. Теоретические основы статистической радиотехники. Книга 1, М.: Сов. радио, 1969, с.80).
Сравнение предложенного способа и прототипа проведем по двум критериям: по времени формирования информационного кадра и по потерям световой мощности за счет гашения лазерного излучения на технологические паузы.
Определим время Т∑2 формирования двух строк информационного кадра с тремя тактами строки с исходными значениями временных интервалов, которые описаны в прототипе:
- время формирования такта строки ТС=100 мкс,
- время задержки между первым и вторым тактами строки Т0=10 мкс,
- время задержки между вторым и третьим тактами строки ТПХ=20 мкс,
- время задержки между строками Т6=10 мкс.
Проведя вычисления, получим для прототипа:  . Длительность задержек равна
. Длительность задержек равна  .
.
Время формирования двух строк информационного кадра с тремя тактами строки в предложенном способе, как следует из фиг.2, численно равно 6ТС+ТПХ. Полагая ТС=100 мкс, а ТПХ=20 мкс, получим значение Т∑2=620 мкс и Т∑задер.=20 мкс. Полученный выигрыш по времени формирования двух строк (и кадра в целом) для предлагаемого способа по отношению к прототипу составляет величину  . Проведя вычисления, получим ηT=8,8%.
. Проведя вычисления, получим ηT=8,8%.
Величина световых потерь может быть оценена следующим выражением: ηP=Т∑задер/Т∑2. Подставляя вышеприведенные значения временных интервалов, получим:  ηP=3%. Величина световых потерь в предлагаемом способе значительно меньше, чем у прототипа. Уменьшение световых потерь при формировании лазерного растра увеличивает отношение сигнал/шум фотоприемного устройства управляемого объекта и, следовательно, повышает информативность системы телеориентации.
ηP=3%. Величина световых потерь в предлагаемом способе значительно меньше, чем у прототипа. Уменьшение световых потерь при формировании лазерного растра увеличивает отношение сигнал/шум фотоприемного устройства управляемого объекта и, следовательно, повышает информативность системы телеориентации.
В реальности выигрыш значительно больше. Время задержки между первым и вторым тактами строки должно выбираться с учетом инерционности сканирующей системы (дефлектора) лазера. Так, при использовании акустооптических дефлекторов из парателлурита для сканирования лазерного пучка со световой апертурой, как отмечено в прототипе, равной 10 мм, время установления акустической волны равно примерно 15 мкс. Следовательно, временная задержка между первым и вторым тактами строки для обеспечения временного разрешения импульсов ФПУ от двух соседних тактов строки должна быть не менее 15 мкс.
Для повышения информативности системы телеориентации необходимо повышать частоту обновления кадров путем уменьшения времени формирования тактов строки. Полагая время формирования тактов строки равным 50 мкс и необходимое время Т0=15 мкс проведем вычисления, аналогичные вышеприведенным. В результате вычислений получим: ηТ=18%, ηР прот=23%, ηР=6%. При дальнейшем уменьшении времени формирования тактов строки выигрыш будет более существенным.
Таким образом, одновременное формирование двух строк информационного растра, сдвинутых относительно друг друга на N/4 строк, путем поочередного формирования одиночных тактов в первой и затем во второй строках, введение временной задержки после формирования второго такта второй строки, являющейся признаком информационного кадра, введение после формирования первого такта второй строки командных растров временной задержки ΔТК=0…ТС, эквивалентной величине передаваемой команды, и введение после формирования второго такта второй строки командных растров, временной задержки, равной сумме временных задержек - временной задержки, являющейся признаком командного растра, и величины (ТС-ΔТК), а также сдвиг следующей пары вновь формируемых строк относительно сформированной пары строк на N/4 строки позволили повысить информативность лазерной системы телеориентации за счет повышения частоты передачи в информационном поле лазерной системы телеориентации путем уменьшения длительности временных задержек между тактами и снижения световых потерь.
Изобретение обеспечивает также повышенную точность выделения полезных сигналов по двум ортогональным координатам при увеличенной частоте формирования лазерной системой кадров информационного поля, что повышает точность ориентации движущегося объекта и функциональную надежность управления и корректирования его траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ телеориентации движущихся объектов | 2015 |
|
RU2614333C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО РАСТРА | 2013 |
|
RU2532504C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2537662C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2000 |
|
RU2177208C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2012 |
|
RU2486543C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации, оптической связи и может быть использовано при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах и т.д. Заявленный способ основан на сканировании акустооптическими дефлекторами излучения лазера с "иглообразной" диаграммой направленности, причем траектория движения лазерного пучка обеспечивает формирование как информационных кадров, используемых для измерения координат управляемого объекта, так и командных кадров, используемых для передачи дополнительных команд на управляемый объект. Особенностью способа является одновременное формирование двух строк информационного растра, сдвинутых относительно друг друга на N/4 строк, путем поочередного формирования одиночных тактов в первой и затем во второй строках, где N - число строк в растре. Достигаемый технический результат изобретения - повышение информативности лазерной системы телеориентации за счет повышения частоты повторения информационных и командных растров в информационном поле лазерной системы телеориентации путем уменьшения длительности временных задержек между тактами и снижения световых потерь. 4 ил.
Способ формирования информационного поля лазерной системы телеориентации, основанный на поочередном формировании Р пар прямоугольных ортогональных информационных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам с числом тактов сканирования в строке, равным трем, и встречном направлении сканирования двух соседних тактов, с временем сканирования такта ТС и формировании S командных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам с числом тактов сканирования в строке, равным трем, у которых в каждом такте выбрано одинаковое направление сканирования по строкам, временной интервал между первым и вторым тактами пропорционален величине передаваемой команды, а временные задержки между вторыми и третьими тактами, являющиеся признаками типа растра, различны для каждого из информационных и командных растров, отличающийся тем, что одновременно формируют две строки растра, сдвинутые друг относительно друга на N/4 строки, для этого поочередно формируют одиночные такты в первой и затем во второй строках, причем при формировании информационных растров после формирования второго такта второй строки вводят временную задержку, являющуюся признаком информационного кадра, а при формировании командных растров после формирования первого такта второй строки вводят временную задержку ΔТ=0…ТС, эквивалентную величине передаваемой команды, после формирования второго такта второй строки вводят временную задержку, равную сумме временных задержек - временной задержки, являющейся признаком командного растра, и величины (ТС-ΔТ), и сдвигают следующую пару вновь формируемых строк относительно сформированной пары строк на N/4 строки.
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| УСТРОЙСТВО ДЛЯ ГРАНУЛИРОВАНИЯ УДОБРЕНИЙ | 2012 |
|
RU2516664C1 |
| US 6357694 B1, 19.03.2002 | |||
| US 4676455 A, 30.06.1987 | |||
| ГАЗОНАПОЛНЕННЫЙ РАЗРЯДНИК | 2006 |
|
RU2321097C1 |

