11477581
Изобретение относится к железнодорожному транспорту и может быть использовано на электровозах переменного тока.
Цель изобретения - повышение точности.
На чертеже изображена функциональная схема устройства для автоматического управления приводом электровоза переменного тока.
Устройство состоит из соединенного выходом с тяговыми двигателями 1 тиристорного преобразователя 2, вход блока 3 управления которым подключен к выходу регулятора 4 тока, входы которого соединены с выходом блока 5 выделения максимального тока якорей тяговых двигателей, подключенного входами к выходам датчиков 6 тока якорей, и выходом блока 7 выделения минимального сигнала, один из входов которого соединен с выходом за- датчика 8 токов якорей, а другой - с одним из выходов регулятора 9 скорое ти, подключенного другим выходом к одному из входов блока 10 управления песочницей, а одним и другим входами - к выходам соответственно блока 11 выделения минимальной скорости вращения колесных пар, соединенного входами с выходами датчиков 12 скорости вращения колесных пар, и блока 13 выделения минимального сигнала, подключенного входами к выходам задатчика 14 скорости электровоза и фильтра 15 нижних частот, вход которого соединен с выходом сумматора 16, подключенного входами к выходам блока 11 выделения минимальной скорости вращения колесных пар и задатчика 17 допустимой скорости скольжения, к выходу последнего из которых подключен другой вход блока
10 управления песочницей, который вы-45 ния в режим боксования последней коУстройство работает следующим образом.„ ( До момента достижения электровозом
е заданной скорости и при отсутствии ( синхронного боксования колесных пар регулятор 4 тока поддерживает в цепи якорей тяговых двигателей заданное значение тока. В этом режиме блок 7
Ю выделения минимального сигнала пропускает сигнал с задатчика 8 тока, который заведомо меньше сигнала на выходе регулятора 9 скорости, формируемого посредством блока 13 выделения мини15 мального сигнала. Сигнал, поступающий с выхода фильтра 15 нижних частот, меньше сигнала на выходе задатчика 14 скорости электровоза, поэтому блок 13 пропускает сигнал с выхо20 да фильтра 15, на вход которого поступает сигнал с выхода сумматора 16, равный сумме сигналов с задатчика 17 допустимой скорости скольжения и блока 11 выделения минимальной скорости.
При возникновении синхронного бок- сования колесных пар сигнал, поступающий на один из входов, который является вычитающим, элемента 22 сравнения от блока 11, растет интенсивнее, чем сигнал, поступающий на другой вход, в силу демпфирующего действия фильтра 15 нижних частот. В результате выходной сигнал элемента
35 22 сравнения снижается. Начиная с момента времени, когда сигнал на выходе регулятора 9 скорости становится меньше сигнала с задатчика 8 токов якорей, блок 7 пропускает на вход
40 регулятора 4 тока сигнал с выхода регулятора 9 скорости, работающего по каналу задатчика 17, так как сигнал на выходе регулятора 9 скорости начинает снижаться с момента встуште25
30
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2013232C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1595707A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1989 |
|
SU1676859A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано на электровозах переменного тока. Цель изобретения - повышение точности. Устройство для автоматического управления приводом электровоза переменного тока состоит из тиристорного преобразователя 2 с блоком 3 управления, вход которого подключен к выходу регулятора 4 тока, соединенного входами с выходом блока 5 выделения максимального тока якорей тяговых двигателей и блока 7 выделения минимального сигнала, входы которого подключены к выходу задатчика 8 токов якорей и выходу регулятора 9 скорости, соединенного другим выходом с одним из входов блока 10 управления песочницей, а входами - с выходом блока 11 выделения минимальной скорости вращения колесных пар и блока 13 выделения минимального сигнала, подключенного входами к выходам задатчика 14 скорости электровоза и фильтра 15 нижних частот, вход которого соединен с выходом сумматора 16, подключенного входами к выходам блока 11 и задатчика 17 допустимой скорости скольжения. 1 ил.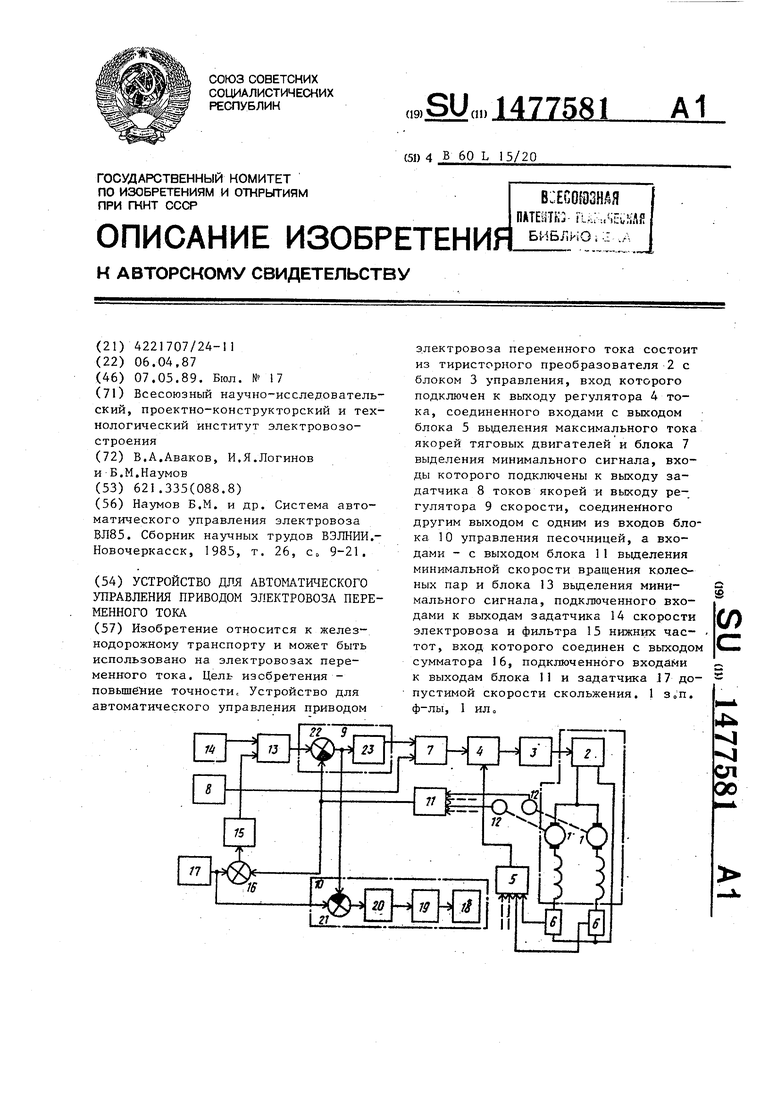
полнен на соединенных последовательно исполнительном элементе 18, гене- - раторе 19 прямоугольных импульсов, компараторе 20 и элементе 21 сравнения, входы которого являются входами 50 блока 10 управления песочницей. Регулятор 9 скорости выполнен на соединенных последовательно элементе 22 сравнения и усилителе 23, выход которого, а также выход и один и другой 55 входы элемента 22 сравнения являются соответственно одним и другим выходами и одним и другим входами регулятора 9 скорости.
лесной пары. При этом снижается напряжение и мощность, подводимая к тяговым двигателям 1, и синхронное боксование прекращается.
При снижении скольжения до уровня, при котором сигнал с задатчика 8 становится меньше, чем с регулятора 9 скорости) процесс снижения напряжения и мощности прекращается и вновь осуществляется поддержание тока в якорях тяговых двигателей.
Таким образом, происходит подчиненное автоматическое регулирование мощности тяговых двигателей по каналу задатчика 17 допустимой скорости скольжения, при этом скорость скольжения колесной пары, последней вступающей в режим синхронного боксова- ния, не может превышать величины, определяемой задатчиком 17.
При возникновении синхронного бок- сования сигнал на выходе элемента 22 сравнения снижается, а на выходе эле-jg мента 21 сравнения растет и при достижении заданной величины срабатывает компаратор 20, который запускает генератор 19, сигнал с которого поступает на исполнительный элемент J5 eL8, управляющий песочницей. Происходит импульсная подсыпка песка, способствующая ликвидации боксования.
Формула изобретения 20
g 5
0
5
0
5
блока выделения минимальной скорости вращения колесных пар, соединенного входами с выходами датчиков скорости вращения колесных пар, задатчик скорости электровоза и блок управления песочницей, отличающее- с я тем, что, с целью повышения точности, оно снабжено задатчиком допустимой скорости скольжения, сумматором, фильтром нижних частот и дополнительным блоком выделения минимального сигнала, подключенного входами к выходам задатчика скорости электровоза и фильтра нижних частот, а выходом - к другому входу регулятора скорости, другой выход которого соединен с одним из входов блока управления песочницей, другой вход которого и один из входов сумматора подключены к выходу задатчика допустимрй скорости скольжения, причем другой вход и выход сумматора соединены соответственно с выходом блока выделения минимальной скорости вращения колее- ных пар и входом фильтра нижних частот.
| Наумов Б.М | |||
| и др | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Сборник научных трудов ВЭЛНИИ,- Новочеркасск, 1985, т | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
