Изобретение относится к устройствам автоматического управления локомотивом, в частности к устройствам автоматического управления тяговым приводом электровода с тяговыми двигателями постоянного тока независимого возбуждения.
Цель изобретения - улучшение тяговь1х свойств электровоза и снижение динамических усилий в приводе и составе при боксовании и восстановлении сцепления.
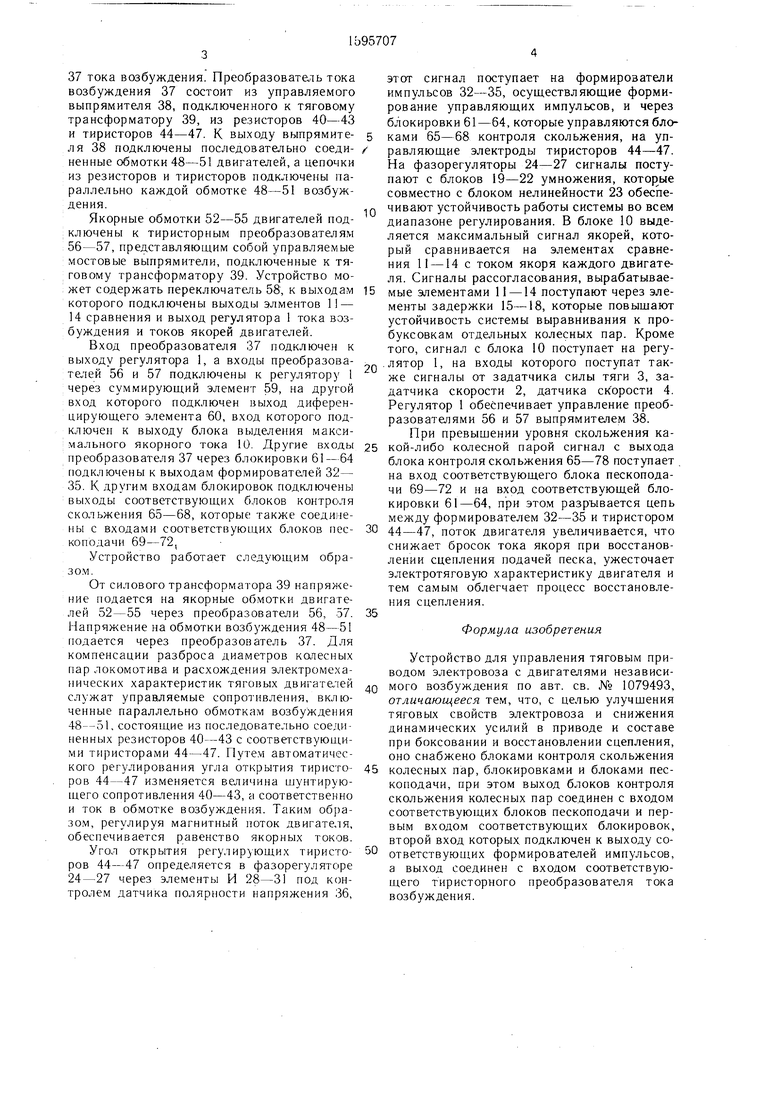
На чертеже представлена блок-схема устройства.
Устройство содержит регулятор 1 тока возбуждения и якорных токов двигателей, к выходам которого подключены задатчик 2 скорости, задатчик 3 силы тяги, датчик 4 скорости и датчик 5 тока возбуждения. Датчики 6-9 якорных токов подключены к выходам блока 10 выделения максимального якорного тока и одним из входов элементов 11 - 14 сравнения. Выход блока 10 соединен с одним из входов регулятора 1 и другими входами элементов 11 -14 сравнения. Выходы элементов 11 -14 через соответствующие элементы 15-18 задержки нены с входами блоков 19-22 умножения, другие входы которых подключены к выходу блока 23 нелинейности, соединенного входом с датчиком 5 тока возбуждения. Выходы блоков 19-22 умножения подключены через фазорегуляторы 24-27 к одному из входов соответствующих элементов И 28-31, выходы которых подключены к входам формирователей импульсов 32-35, а другой вход которых подключен к датчику 36 полярности напряжения тиристорного преобразователя
СП
со
СП
м
37 тока возбуждения. Преобразователь тока возбуждения 37 состоит из управляемого выпрямителя 38, подключенного к тяговому трансформатору 39, из резисторов 40-43 и тиристоров 44-47. К выходу выпрямите- ля 38 подключены последовательно соеди- ненные обмотки 48-51 двигателей, а цепочки из резисторов и тиристоров подключены параллельно каждой обмотке 48-51 возбуждения.
Якорные обмотки 52-55 двигателей подключены к тиристорным преобразователям 56-57, представляюашм собой управляемою мостовые выпрямители, подключенные к тяговому трансформатору 39. Устройство может содержать переключатель 58, к выходам которого подключены выходы элментов 11 - 14 сравнения и выход регулятора 1 тока возбуждения и токов якорей двигателей.
Вход преобразователя 37 подключен к выходу регулятора 1, а входы преобразователей 56 и 57 подключены к регулятору 1 через суммирующий элемент 59, на другой вход которого подключен выход диферен- цирующего элемента 60, вход которого подключен к выходу блока выделения максимального якорного тока 10. Другие входы преобразователя 37 через блокировки 61-64 подключены к выходам формироватепей 32- 35. К другим входам блокировок подключены выходы соответствуюн их блоков контроля скольжения 65-68, которые также соединены с входами соответствующих блоков пес- коподачи 69-72,
Устройство работает следующим образом.
От силового трансформатора 39 напряжение подается на якорные обмотки двигателей 52-55 через преобразователи 56, 57. Напряжение на обмотки возбуждения 48-51 подается через преобразователь 37. Для компенсации разброса диаметров колесных пар локомотива и расхождения электромеханических характеристик тяговых двигателей служат управляемые сопротивления, включенные параллельно обмоткам возбуждения 48-51, состоящие из последовательно соединенных резисторов 40-43 с соответствующими тиристорами 44-47. Путем автоматического регулирования угла открытия тиристо- ров 44-47 изменяется величина шунтирующего сопротивления 40-43, а соответственно и ток в обмотке возбуждения. Таким обра- зо.м, регулируя магнитный поток двигателя, обеспечивается равенство якорных токов.
Угол открытия регулирующих тиристо- ров 44-47 определяется в фазорегуляторе 24-27 через элементы И 28-31 под контролем датчика полярности напряжения 36,
этот сигнал поступает на формирователи импульсов 32-35, осуществляющие формирование управляющих импульсов, и через блокировки 61-64, которые управляются блоками 65-68 контроля скольжения, на управляющие электроды тиристоров 44-47. На фазорегуляторы 24-27 сигналы поступают с блоков 19-22 умножения, котор ые совместно с блоком нелинейности 23 обеспечивают устойчивость работы системы во всем диапазоне регулирования. В блоке 10 выделяется максимальный сигнал якорей, который сравнивается на элементах сравнения 11 -14 с током якоря каждого двигателя. Сигналы рассогласования, вырабатываемые элементами 11 -14 поступают через элементы задержки 15-18, которые повыщают устойчивость системы выравнивания к пробуксовкам отдельных колесных пар. Кроме того, сигнал с блока 10 поступает на регулятор 1, на входы которого поступат также сигналы от задатчика силы тяги 3, за- датчика скорости 2, датчика С1 орости 4. Регулятор 1 обеспечивает управление преобразователями 56 и 57 выпрямителем 38.
При превыщении уровня скольжения какой-либо колесной парой сигнал с выхода блока контроля скольжения 65-78 поступает . на вход соответствующего блока пескопода- чи 69-72 и на вход соответствующей блокировки 61-64, при этом разрывается цепь между формирователем 32-35 и тиристором 44-47, поток двигателя увеличивается, что снижает бросок тока якоря при восстановлении сцепления подачей песка, ужесточает электротяговую характеристику двигателя и тем самым облегчает процесс восстановления сцепления.
Формула изобретения
Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения по авт. св. № 1079493, отличающееся тем, что, с целью улучшения тяговых свойств электровоза и снижения динамических усилий в приводе и составе при боксовании и восстановлении сцепления, оно снабжено блоками контроля скольжения колесных пар, блокировками и блоками пес- коподачи, при этом выход блоков контроля скольжения колесных пар соединен с входом соответствующих блоков пескоподачи и первым входом соответствующих блокировок, второй вход которых подключен к выходу соответствующих формирователей импульсов, а выход соединен с входом соответствующего тиристорного преобразоватепя тока возбуждения.
3&
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1988 |
|
SU1646921A2 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННО-ПОСТОЯННОГО ТОКА | 1990 |
|
RU2026209C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2260520C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для выравнивания нагрузок тяговых электродвигателей подвижного состава | 1985 |
|
SU1232521A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2208530C2 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для автоматического управления приводом электровоза переменного тока | 1987 |
|
SU1477581A1 |

Изобретение относится к устройствам автоматического управления локомотивом и направлено на улучшение тяговых свойств электровоза и снижение динамических усилий в приводе и составе при боксовании и восстановлении сцепления. Устройство содержит регулятор токов якоря и возбуждения двигателей с задатчиками и датчиками токов и скорости. Обмотки якорей и возбуждения двигателей питаются от трансформатора через тиристорные преобразователи, управляемые от регулятора. Обмотки возбуждения шунтированы цепочками резистор-тиристор, которые позволяют выравнивать нагрузки двигателей путем отпирания тиристора в зависимости от отклонения токов якорей от их наибольшего значения. Блоки контроля скольжения колесных пар разрывают цепь выравнивания нагрузки соответствующего двигателя и воздействуют на блок пескоподачи при бокосовании отдельных осей, снижая при этом бросок тока якоря при восстановлении сцепления подачей песка. 1 ил.
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
