Изобретение относится к машиностроению и может быть использовано в качестве бесступенчатого привода различных машин.
Цель изобретения - повышение надежности привода за счет смазки его элементов независимо от режимов работы.
выполнен в виде реле времени, а датчики 23 и 24 давления - в виде реле давления. Привод имеет также гидро- аккумулят ор 26, параллельно установленные дроссель 27 и обратный клапан 28, трехлинейный клапан 29 с гидравлическим управлением, вход которого связан с напорной магистралью 13,
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесступенчатая передача | 1985 |
|
SU1348585A1 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| Гидропривод механизма поворота подъемного крана | 1989 |
|
SU1691574A1 |
| Машина для рытья траншей | 1986 |
|
SU1375748A1 |
| Система управления гидромеханической трансмиссией | 1988 |
|
SU1562166A1 |
| Система управления гидромеханической трансмиссией | 1988 |
|
SU1549806A1 |
Изобретение относится к машиностроению и может быть использовано в качестве бесступенчатого привода различных машин. Цель изобретения - повышение надежности привода за счет смазки его элементов независимо от режимов работы. После включения дополнительного приводного двигателя 20 гидронасоса 12 рабочая жидкость поступает в гидроцилиндры 5,6. По достижении требуемого давления соответствующий сигнал поступает на логический элемент И 22, а с элемента 21 задержки поступает сигнал после поступления смазки на элементы привода. В результате вырабатывается команда на включение приводного двигателя 3. В процессе работы привода заряжается гидроаккумулятор 26, который в дальнейшем осуществляет подпитку гидроцилиндров 5,6. Рабочая жидкость подается в линию смазки 15 непосредственно от гидронасоса 12. 1 ил.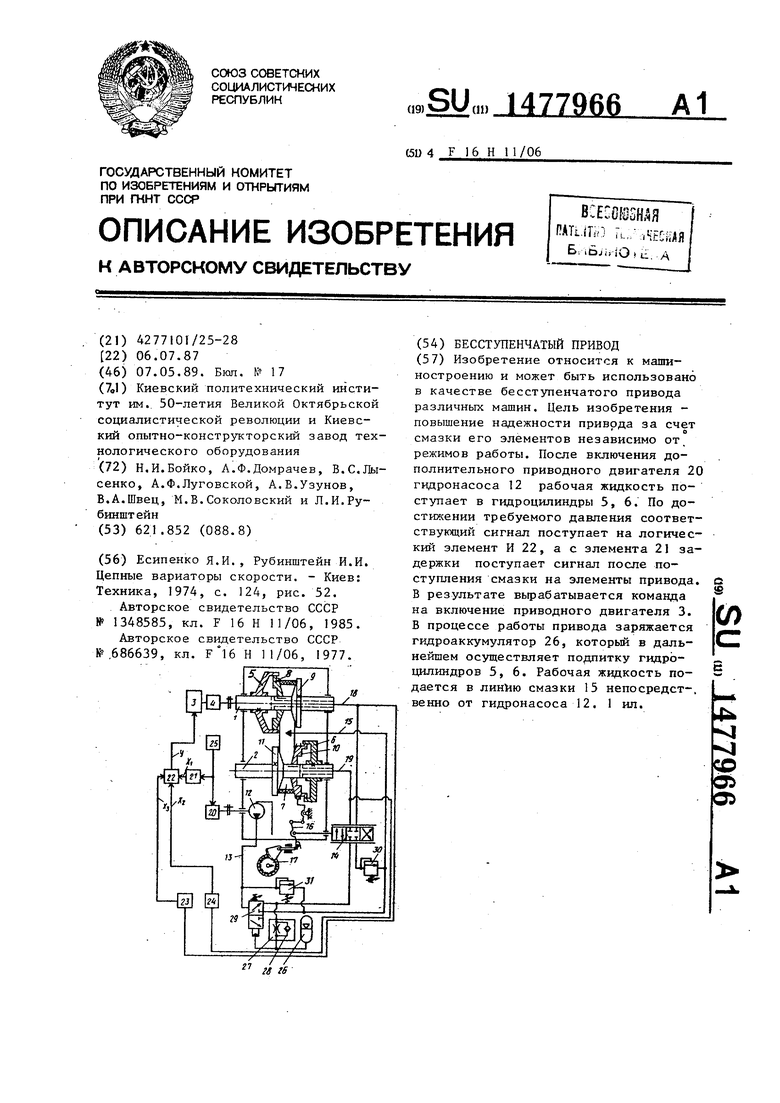
На чертеже представлена схема бес- Ю первый выход - с гидравлическим регуступенчатого привода.
Бесступенчатый привод содержит ведущий 1 и ведомый 2 валы, приводной двигатель 3, кинематически связанный с ведущим валом 1 посредством редук- 15 тора 4, и гидроцилиндры 5 и 6, размещенные соосно валам 1 и 2. На последних установлены охваченные бесконечной гибкой связью 7 пары конических дисков 8, 9 и 10, 11. Коничес- 0 кие диски 9 и 11 жестко связаны с соответствующими валами, а конические диски 8 и 10 имеют возможность смещения в осевом направлении и представляют собой поршни соответствующих гидроцилиндров 5 и 6. Бесступенчатый привод включает также гидронасос 12, подключенную к нему напорную магистраль 13, гидравлический регулирующий
25
лирующим элементом 14, второй выход с линией 15 смазки, линия управлени с гидроаккумулятором 26 и посредств параллельно установленных дросселя и обратного клапана 28,- с первым в ходом. Гидравлический элемент 14 уп равления выполнен в виде четырехлинейного распределителя и подключен другим концам магистралей 18 и 19, посредством подпорного клапана 30 - к линии 15 смазки.
Напорная магистраль 13 посредств предохранительного клапана 31 подкл чена ко второму выходу трехлинейног клапана 29.
Бесступенчатый привод работает
следующим образом. I
Индикатором 17 настраивают требуе мое передаточное число. Затем, напри
злемент 14, подсоединенную к нему ли-30 мер с пульта 25 управления включанию 15 смазки и механизм изменения скорости в виде системы рычагов 16, кинематически связанных с коническим диском 10 ведомого вала 2, индикатором 17 настройки передаточного числа 35 и гидравлическим регулирующим элементом 14. К гидроцилиндрам 5 и 6 посредством каналов, выполненных в соответствующих валах 1 и 2, подключены одним концом магистрали 18 и 19. 40 Привод снабжен кинематически связанным с гидронасосом 12 дополнительным приводным двигателем 20, подключенным к нему элементом 21 задержки, подсоединенным к последнему и связанным с Д5 приводным двигателем 3 логическим элементом И 22, подсоединенными к нему двумя датчиками 23 и 24 давления, каждый из которых подключен к соответствующему гидроцилиндру 5 или 6. На выходе элемента 21 задержки и датчиков 23 и 24 давления имеют мес50
ется дополнительный приводной двигатель 20 гидронасоса 12, Рабочая жидкость через трехлинейный клапан 29, установленный в верхнюю по чертежу позицию, поступает в гидроцилиндр 5 (или 6), перемещая бесконечную гибку связь 7 в положение, соответствующе заданному передаточному числу. Слив рабочей жидкости из гидроцилиндра 6 (или 5) осуществляется через четырех линейный распределитель и подпорный клапан 30 в линию 15 смазки. Как только давления в гидроцилиндрах 5 и 6 достигают величин, обеспечивающих надежный поджим бесконечной гибкой связи 7 к коническим дискам, на выходе датчиков 23 и 24 давления появляются сигналы У2 х 1 После выдержки времени, обеспечивающей предварительную надежную смазку трущихся пар привода, на выходе элемент 21 задержки вырабатывается сигнал У, 1. На выходе логического элемент И 22 появляется сигнал Y 1, дающий команду на включение приводного двигателя 3, который вращает ведущий вал 1. Последний посредством коничес ких дисков 8 и 9, бесконечной гибкой связи 7, конических дисков 10 и 11
то сигналы X,,, X
ч
X.
а на выходе
логического элемента И 22 - сигнал Y. Сигналы У,, Х7, У 5, Y принимают дискретные значения 0 или 1. Управление приводными двигателями 3 и 20 может осуществляться с пульта 25 управления. Элемент 21 задержки может быть
лирующим элементом 14, второй выход - с линией 15 смазки, линия управления - с гидроаккумулятором 26 и посредством параллельно установленных дросселя 27 и обратного клапана 28,- с первым выходом. Гидравлический элемент 14 управления выполнен в виде четырехлинейного распределителя и подключен к другим концам магистралей 18 и 19, а посредством подпорного клапана 30 - к линии 15 смазки.
Напорная магистраль 13 посредством предохранительного клапана 31 подключена ко второму выходу трехлинейного клапана 29.
Бесступенчатый привод работает
следующим образом. I
Индикатором 17 настраивают требуемое передаточное число. Затем, например с пульта 25 управления включа50 5
0
ется дополнительный приводной двигатель 20 гидронасоса 12, Рабочая жидкость через трехлинейный клапан 29, установленный в верхнюю по чертежу позицию, поступает в гидроцилиндр 5 (или 6), перемещая бесконечную гибкую связь 7 в положение, соответствующее заданному передаточному числу. Слив рабочей жидкости из гидроцилиндра 6 (или 5) осуществляется через четырехлинейный распределитель и подпорный клапан 30 в линию 15 смазки. Как только давления в гидроцилиндрах 5 и 6 достигают величин, обеспечивающих надежный поджим бесконечной гибкой связи 7 к коническим дискам, на выходе датчиков 23 и 24 давления появляются сигналы У2 х 1 После выдержки времени, обеспечивающей предварительную надежную смазку трущихся пар привода, на выходе элемента 21 задержки вырабатывается сигнал У, - 1. На выходе логического элемент И 22 появляется сигнал Y 1, дающий команду на включение приводного двигателя 3, который вращает ведущий вал 1. Последний посредством конических дисков 8 и 9, бесконечной гибкой связи 7, конических дисков 10 и 11
вращает ведомый вал 2, кинематически связанный с нагрузкой (не показано).
Одновременно с этим рабочая жид- кость от гидронасоса 12 через дроссель 27 с закрытым обратным клапаном
28поступает в гидроаккумулятор 26, осуществляя его зарядку. Как только давление в гидроаккумуляторе 26 под- нимается до давления, несколько большего давления в гидроцилиндрах 5 и 6, обеспечивающих надежный прижим бесконечной гибкой связи 7 к коническим дискам, но ниже давления настройки предохранительного клапана 31, трехлинейный клапан 29 под действием силы этого давления переключается в нижнюю по чертежу позицию, гидронасос 12 разгружается от давления и подает жидкость в линию 15 смазки. Компенсация утечек в гидроцилиндрах 5
и 6, четырехлинейном распределителе и трехлинейном клапане 29 осуществляется гидроаккумулятором 26, который через обратный клапан 28 подпитывает гидросистему. Дроссель 27 с обратным клапаном 28 обеспечивает плавность процесса зарядки аккумулятора, в то же время в случае срабатывания -механизма изменения обеспечивается беспрепятственное поступление жидкости из аккумулятора 26 через открытый обратный клапан в гидроцилиндры 5 и 6. Подпорный клапан 30 создает противодавление в рабочей полости гидроцилиндра, соединенной в данный момент через четырехлинейный распределитель с линией 15 смазки, и тем самым обес- печивает плавность перемещения подвижных частей гидроцилиндров. Предохранительный клапан 31 защищает гидронасос 12 и дополнительный приводной двигатель 20 от перегрузки. Обратная связь в виде системы рычагов 16 обеспечивает поддержание заданного передаточного числа. Например, если четырехлинейный гидрораспределитель отклонился в промежуточную между левой и средней по чертежу позициями, то рабочая жидкость от гидронасоса 12 через трехлинейный клапан
29и четырехлинейный гидрораспределитель поступает в гидроцилиндр 6. Конический диск 10 перемещается влево, бесконечная гибкая связь 7 перемеща-- ет конический диск 8 также влево, и рабочая жидкость из гидроцилиндра 5 , через четырехлинейный гидрораспреде
,
Q 5 0
5
5
0
5
0
5
0
литель и подпорный клапан 30 уходит на смазку и далее в корпус привода. Одновременно конический диск 10 поворачивает систему рычагов 16 относительно неподвижного индикатора 17, возвращая четырехлинейный гидрораспределитель в нейтральное положение.
Работа аналогична при перенастройке передачи на новое передаточное число.
Формула изобретения
Бесступенчатый привод, содержащий ведущий и ведомый валы, приводной двигатель, кинематически связанный с ведущим валом, гидроцилиндры, размещенные соосно валам, установленные на последних и охваченные бесконечной гибкой связью пары конических дисков, один из которых в каждой паре жестко связан с соответствующим валом, а другой имеет возможность смещения в осевом направлении и представляет собой поршень соответствующего гидроцилиндра, гидронасос, подключенную к нему напорную магистраль, гидравлический регулирующий элемент, подсоединенную к нему линию смазки, механизм изменения скорости, кинематически связанный с одним из подвижных конических дисков и гидравлическим регулирующим элементом, и две магистрали, каждая из которых подсоединена одним концом к соответствующему гидроцилиндру, отличающийся тем, что, с целью повышения надежности привода за счет смазки его элементов независимо от режима работы, привод снабжен кинематически связанным с гидронасосом дополнительным приводным двигателем, подключенным к нему элементом задержки, подсоединенным к последнему и связанным с приводным двигателем логическим элементом И, подсоединенными к нему двумя датчиками давления,каждый из которых подключен к соответствующему гидроцилиндру, гидроаккумулятором, параллельно установленным дросселем и обратным клапаном, трехлинейным клапаном с гидравлическим управлением, вход которого связан с напорной магистралью, первый выход - с гидравлическим регулирующим элементом, второй выход - с линией смазки, линия управления - с гидроаккумулятором и посредством параллельно уста51477966
новленных дросселя и обратного клапа- де четырехлинейного распределителя и на - с первым выходом, а гидравличес- подключен к другим концам магистра- кий элемент управления выполнен в ви- лей.
| Есипенко Я.И., Рубинштейн И.И | |||
| Цепные вариаторы скорости | |||
| - Киев: Техника, 1974, с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Бесступенчатая передача | 1985 |
|
SU1348585A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Бесступенчатая передача | 1977 |
|
SU686639A3 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
