Известен механизм привода обжимных пластин машины для затяжки носков рантовой обуви и для глухой затяжки носка с применением головки для нанравления пластин и связанной с головкой рычажной системы, нриводимой в движение от эксцентриков. Этот механизм привода имеет сложную конструкцию.
Предложенный механизм привода имеет ту особенность, что он состоит из связанного с головкой обжимны.х пластин поднружнненного корпуса с находящимся внутри него штоком, один конец которого связан с нлас1ннами, а другой конец с рычагом, приводимым в движение от эксцентрика, и связанного с корпусом ролика, взаимодействуюндего с неподвижным упором. Корпус снабжен зажимным хомутиком с рукояткой, связанными регулировочным винтом с маховиком.
Указанные особенности механизма упрощают конструкцию машины для затяжки носков и умсньншют ее вес. а также обеспечивают регулировку наклона оси головки относительно обрабатываемой обуви и одновременно перпендикулярно оси колодки.
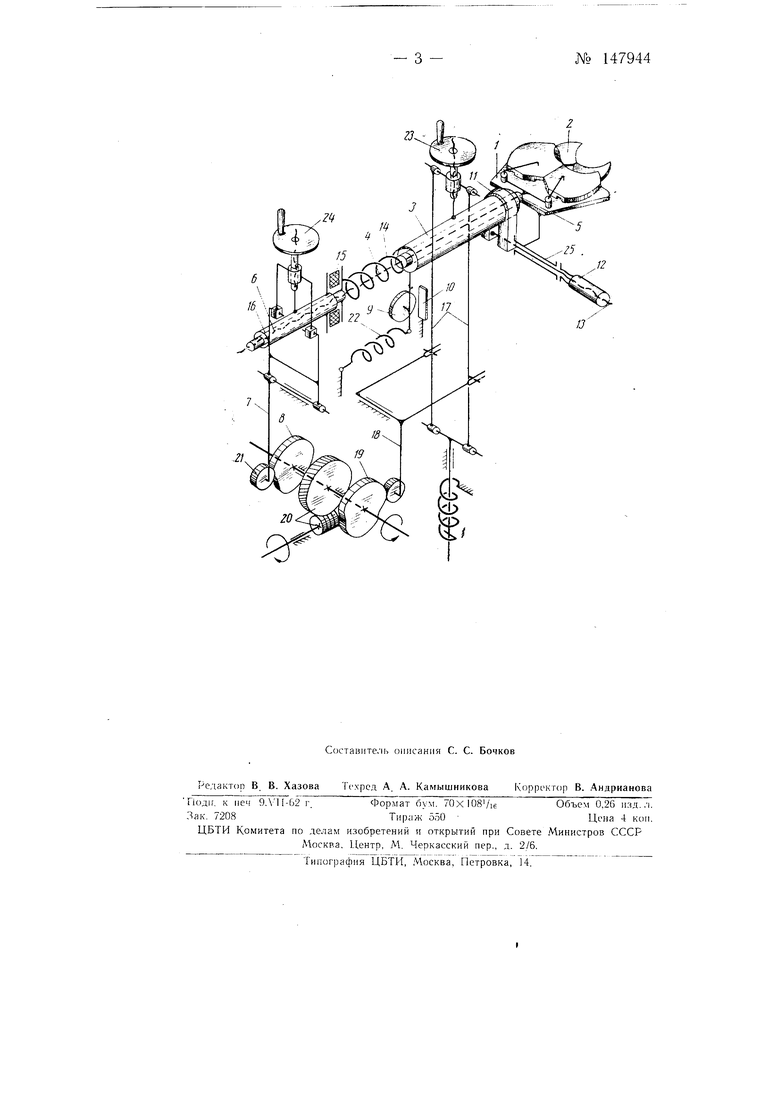
На чертеже изображена схема механизма.
Механиз.м нривода состоит из соединенного с головкой / обжимных пластин 2 подпружиненного корпуса 3, внутри которого перемещается щток 4, ОДИН конец 5 штока соединен с пластинами 2, а другой конец 6 с рычагом 7, приводимым в движение от эксцентрика 8. и связанного с корпусом 3 ролика 9, взаимодействующего с неподвижным упором 10.
Корнус 3 снабжен зажимным хомутиком //с рукояткой 12, связанными регулировочпьлм винтом 13 с маховиком (на чертеже не показан) .
47944-2Поступательгюе движение головки / с пластинами 2 (без их смыкания) и корпуса 3 происходит от пружины 14, буфера 15 и муфты 16, которая шарниряо связана с рычагом 7, приводимым в движение от эксцентрика 8.
При движении штока 4 и корпуса 3 слева направо ролик 5 наталкивается на упор 10. Дальнейшее движение рычага 7 и штока 4 осуш,ествляется за счет сокрашения (сжатия) пружины 14. Благодаря движению штока 4 ироисходр т кулисное перемещение обжимных пластин 2 и их смыкание, а также опускание пластин от действия тяг /7, рычага 18 и эксцентрика 19, приводимого в движение от существующей червячной передачи 20.
При возвращении рычага 7 в исходное положение от действия освобождаемой пружины 14 щток 4 вместе с пластинами 2 перемешается в обратном направлении, т. е. к исходному положению.
Отрыв ролика 9 от упора 10, возврат корпуса 3 с головкой / и пластинами 2 в заднее положение и сохранение постоянного контакта ролика 21 с эксцентриком 8 осуществляется пружиной 22.
Установка наклона оси головки / относительно обрабатываемой обуви производится как маховиком 23, так и маховиком 24. Регулировка наклона головки / перпендикулярно оси колодки (на чертеже не показана) производится рукояткой 12, связанной при помощи регулировочного винта 13 с хомутиком //.
Фиксация головки / пластин 2 в нужном положении производится поворотом рукоятки 12 вокруг оси в противоположном направлении, при этом рукоятка упираегся в трубчатый рычаг 25 и тем самым затягивает хомутик //, создавая при этом неподвижное соединение.
Промышленная полезность данного предложения подтверждена Всесоюзным научно-исследовательским институтом текстильного и легкого машиностроения, по заключению которого предлагае.мый механизм выгодно отличается от существующего наличием трех кулачков вместо десяти и одного кулачка вместо пяти при переходе с обработки обуви с глухой затяжкой на рантовую обувь (или наоборот).
Конструкция узла регулировки положения головки обжимных пластин упрощена.
Предмет изобретения
1.Механизм привода обжимных пластин машины для затяжки носков рантовой обуви и для глухой затяжки носка с применением головки для направления пластин и связанной с головкой рычажной системы, приводимой в движение от эксцентриков, отличающийся тем, что, с целью упрощения конструкции и уменьшения веса машины, механизм привода состоит из связанного с головкой обжимных пластин подпружиненного корпуса с находящимся внутри него штоко.м, один конец которого связан с пластинами, а другой конец с рычагом, приводимым в движение от эксцентрика, и связанного с корпусом ролика, взаимодействующего с неподвижным упором.
2.Механизм привода по п. 1, отличающийся тем, что с целью регулировки наклона оси головки относительно обрабатываемой обуви перпендикулярно оси колодки, корпус снабжен зажимным хомутиком с рукояткой, связанными регулировочным винтом с маховиком.
Z7.