Изобретение относится к гидропневмоавтоматике и может быть использовано в системах управления транспортных средств и промышленных роботов.
Целью изобретения является повышение быстродействия и точности.
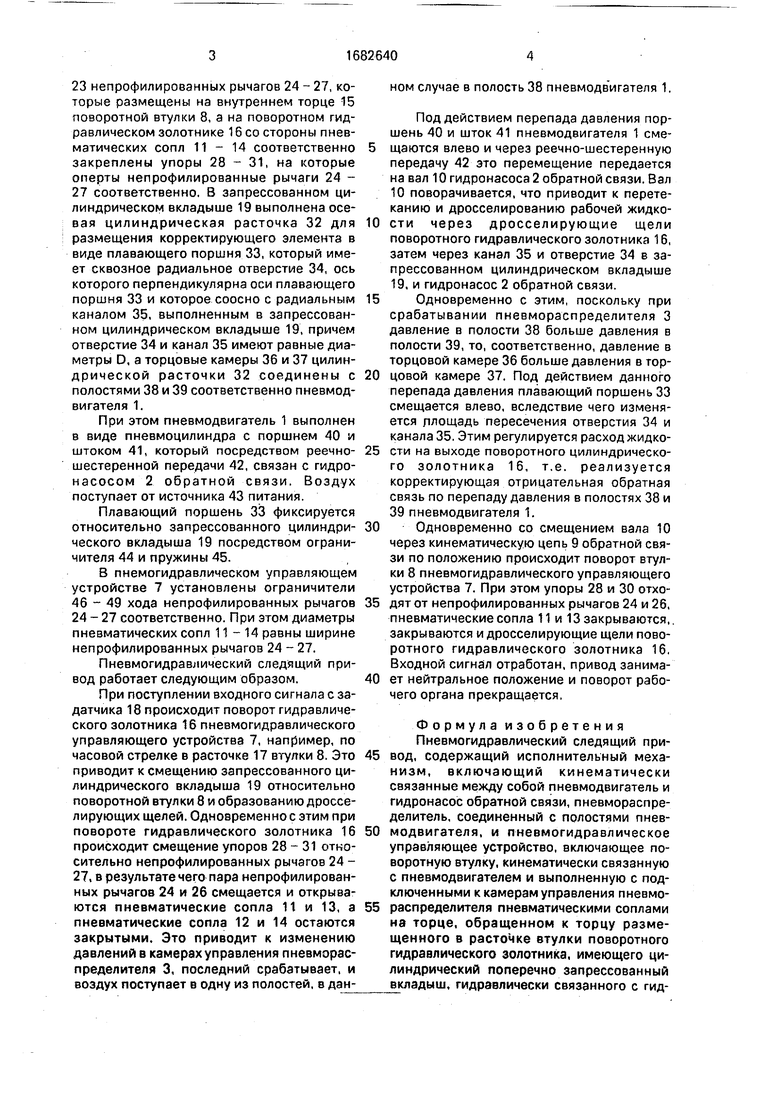
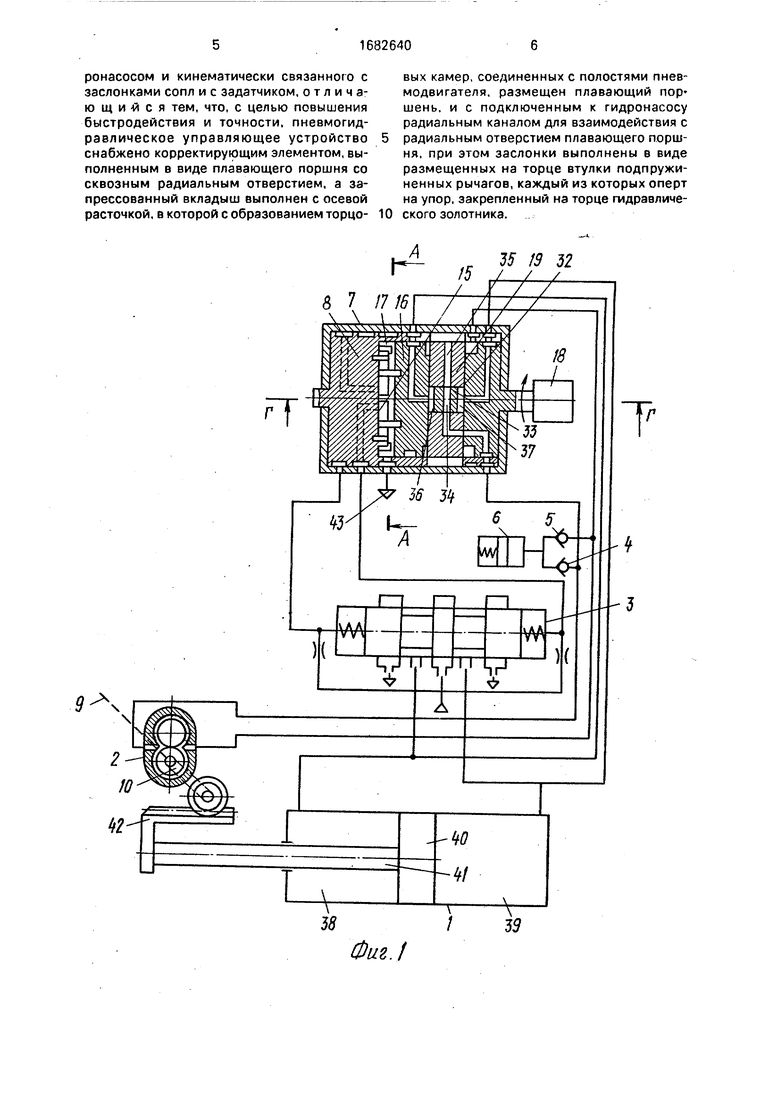
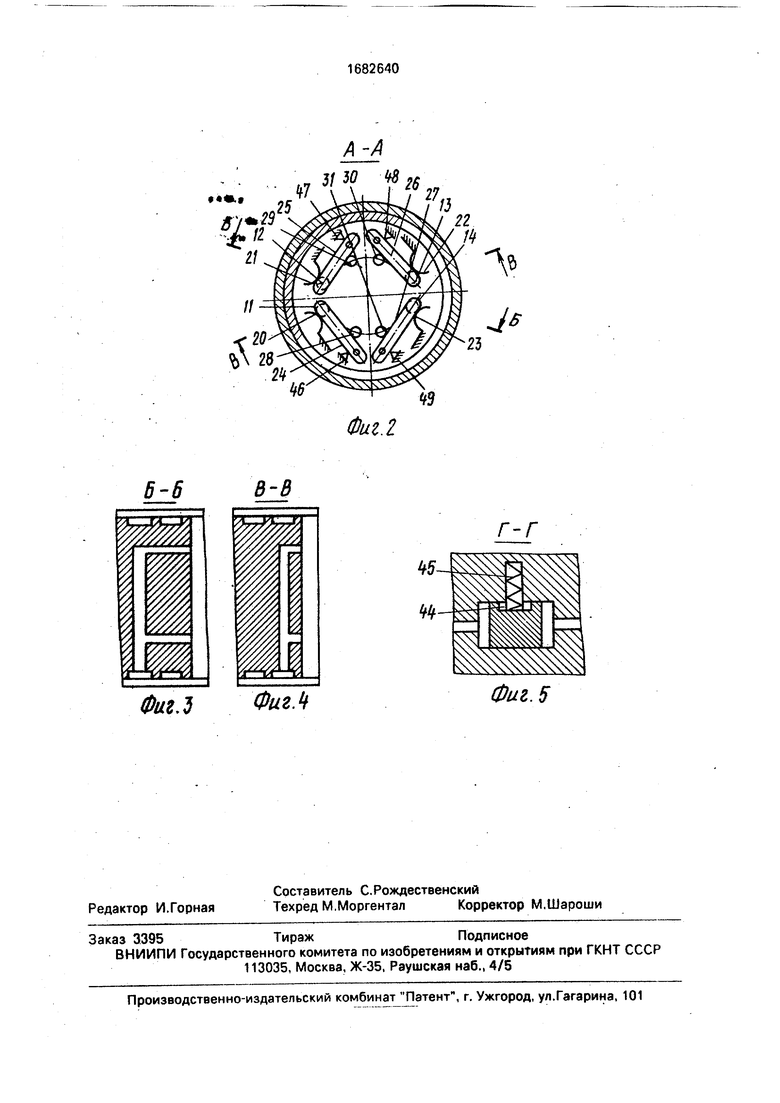
На фиг.1 изображена схема пневмогид- равлического следящего привода; на фиг.2 - разрез А - А на фиг.1; на фиг.З - разрез Б - Б на фиг.2; на фиг.4 - разрез В - В на фиг.2; на фиг.5 - разрез Г-Г на фиг. 1.
Пневмогидравлический следящий привод содержит исполнительный механизм, включающий кинематически связанные между собой пневмодвигатель 1 и гидронасос 2 обратной связи, пневматические линии связи и гидравлические линии связи (не показаны), пневмораспределитель 3, обратные клапаны 4 и 5 подпитки, поршневой гидроаккумулятор 6 и пневмогидравличе- ское управляющее устройство 7, включающее поворотную втулку 8, связанную кинематической цепью 9 с пневмодвигате- лем 1 через вал 10 гидронасоса 2 обратной связи и выполненную с подключенными к камерам управления (не показаны) пневмораспределителя 3 пневматическими соплами 11 - 14 на внутреннем торце 15, обращенном к торцу (не показан) поворотного гидравлического золотника ,16, размещенного в глухой осевой расточке 17 поворотной втулкив, соединенного с задат- чиком 18 и снабжённого поперечно запрессованным цилиндрическим вкладышем 19. Заслонки сопл 11-14 выполнены в виде подпружиненных упругими элементами 20О
СХ ГО О
о
23непрофилированных рычагов 24 - 27, которые размещены на внутреннем торце 15 поворотной втулки 8, а на поворотном гидравлическом золотнике 16 со стороны пневматических сопл 11-14 соответственно закреплены упоры 28 - 31, на которые оперты непрофилированные рычаги 24 - 27 соответственно, В запрессованном цилиндрическом вкладыше 19 выполнена осевая цилиндрическая расточка 32 для размещения корректирующего элемента в виде плавающего поршня 33, который имеет сквозное радиальное отверстие 34, ось которого перпендикулярна оси плавающего поршня 33 и которое соосно с радиальным каналом 35, выполненным в запрессованном цилиндрическом вкладыше 19, причем отверстие 34 и канал 35 имеют равные диаметры D, а торцовые камеры 36 и 37 цилиндрической расточки 32 соединены с полостями 38 и 39 соответственно пневмод- вигателя 1.
При этом пневмодвигатель 1 выполнен в виде пневмоцилиндра с поршнем 40 и штоком 41, который посредством реечно- шестеренной передачи 42, связан с гидронасосом 2 обратной связи. Воздух поступает от источника 43 питания.
Плавающий поршень 33 фиксируется относительно запрессованного цилиндри- ческого вкладыша 19 посредством ограничителя 44 и пружины 45.
В пнемогидравлическом управляющем устройстве 7 установлены ограничители 46 - 49 хода непрофилированных рычагов
24- 27 соответственно. При этом диаметры пневматических сопл 11-14 равны ширине непрофилированных рычагов 24 - 27.
Пневмогидравлический следящий привод работает следующим образом.
При поступлении входного сигнала с за- датчика 18 происходит поворот гидравлического золотника 16 пневмогидравлического управляющего устройства 7, например, по часовой стрелке в расточке 17 вту/тки 8. Это приводит к смещению запрессованного цилиндрического вкладыша 19 относительно поворотной втулки 8 и образованию дросселирующих щелей. Одновременно с этим при повороте гидравлического золотника 16 происходит смещение упоров 28-31 относительно непрофилированных рычагов 24 - 27, в результате чего пара непрофилированных рычагов 24 и 26 смещается и открываются пневматические сопла 11 и 13, а пневматические сопла 12 и 14 остаются закрытыми. Это приводит к изменению давлений в камерах управления пневмэрас- пределителя 3, последний срабатывает, и воздух поступает в одну из полостей, в данном случае в полость 38 пневмодв игателя 1.
Под действием перепада давления поршень 40 и шток 41 пневмодвигателя 1 смещаются влево и через реечно-шестеренную передачу 42 это перемещение передается на вал 10 гидронасоса 2 обратной связи. Вал 10 поворачивается, что приводит к перетеканию и дросселированию рабочей жидкости через дросселирующие щели поворотного гидравлического золотника 16, затем через канал 35 и отверстие 34 в запрессованном цилиндрическом вкладыше 19, и гидронасос 2 обратной связи.
Одновременно с этим, поскольку при срабатывании пневмораспределителя 3 давление в полости 38 больше давления в полости 39, то, соответственно, давление в торцовой камере 36 больше давления в торцовой камере 37. Под действием данного перепада давления плавающий поршень 33 смещается влево, вследствие чего изменяется площадь пересечения отверстия 34 и канала 35. Этим регулируется расход жидкости на выходе поворотного цилиндрического золотника 16, т.е. реализуется корректирующая отрицательная обратная связь по перепаду давления в полостях 38 и 39 пневмодвигателя 1.
Одновременно со смещением вала 10 через кинематическую цепь 9 обратной связи по положению происходит поворот втулки 8 пневмогидравлического управляющего устройства 7. При этом упоры 28 и 30 отходят от непрофилированных рычагов 24 и 26, пневматические сопла 11 и 13 закрываются,, закрываются и дросселирующие щели поворотного гидравлического золотника 16. Входной сигнал отработан, привод занимает нейтральное положение и поворот рабочего органа прекращается,
Формула изобретения Пневмогидравлический следящий привод, содержащий исполнительный механизм, включающий кинематически связанные между собой пневмодвигатель и гидронасос обратной связи, пневмораспре- делитель, соединенный с полостями пневмодвигателя, и пневмогидравлическое управляющее устройство, включающее поворотную втулку, кинематически связанную с пневмодвигателем и выполненную с подключенными к камерам управления пневмораспределителя пневматическими соплами на торце, обращенном к торцу размещенного в расточке втулки поворотного гидравлического золотника, имеющего цилиндрический поперечно запрессованный вкладыш, гидравлически связанного с гидронасосом и кинематически связанного с заслонками сопл и с задатчиком, отличающийся тем, что, с целью повышения быстродействия и точности, пневмогид- равлическое управляющее устройство снабжено корректирующим элементом, выполненным в виде плавающего поршня со сквозным радиальным отверстием, а запрессованный вкладыш выполнен с осевой расточкой, в которой с образованием торцо
вых камер, соединенных с полостями пнев- модвигателя, размещен плавающий пор шень, и с подключенным к гидронасосу радиальным каналом для взаимодействия с радиальным отверстием плавающего поршня, при этом заслонки выполнены в виде размещенных на торце втулки подпружиненных рычагов, каждый из которых оперт на упор, закрепленный на торце гидравлического золотника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Пневмогидравлический следящий привод | 1986 |
|
SU1359501A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1642098A1 |
| Сверлильная головка | 1979 |
|
SU918063A2 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| Сверлильная головка | 1978 |
|
SU854604A2 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
Изобретение относится к гидропневмоавтоматике и может быть использовано в системах управления транспортных средств и промышленных роботов. Целью изобретения является повышение быстродействия и точности. При поступлении входного сигнала происходят поворот золотника совместно с запрессованным вкладышем и образование дросселирующих щелей. Одновременно смещаются упоры 28 - 31 относительно рычагов 24 - 27, в результате чего сопла 11, 13 открываются, а сопла 12, 14 остаются закрытыми. Это приводит к изменению давлений в камерах управления пневмораспределителя, и воздух поступает в полость пневмодвигателя. Перемещение штока передается на вал гидронасоса обратной связи. Под действием перепада давления плавающий поршень смещается влево, т.е. реализуется корректирующая отрицательная обратная связь по перепаду давления в полостях пневмодвигателя. Одновременно происходит поворот втулки, и сопла 11,13 закрываются, привод занимает нейтральное положение. 5 ил. СО
S 7 17/6
J5 19 32
/ / /
Фиг./
«
, „«ли.
п
&
20
гч
w
6-6
В-8
Фиг.З
Фиг А
Фиг. 2
Г-Г
Щ
Фиг. 5
| Пневмогидравлический следящий привод | 1986 |
|
SU1359501A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
