4
СО
оо со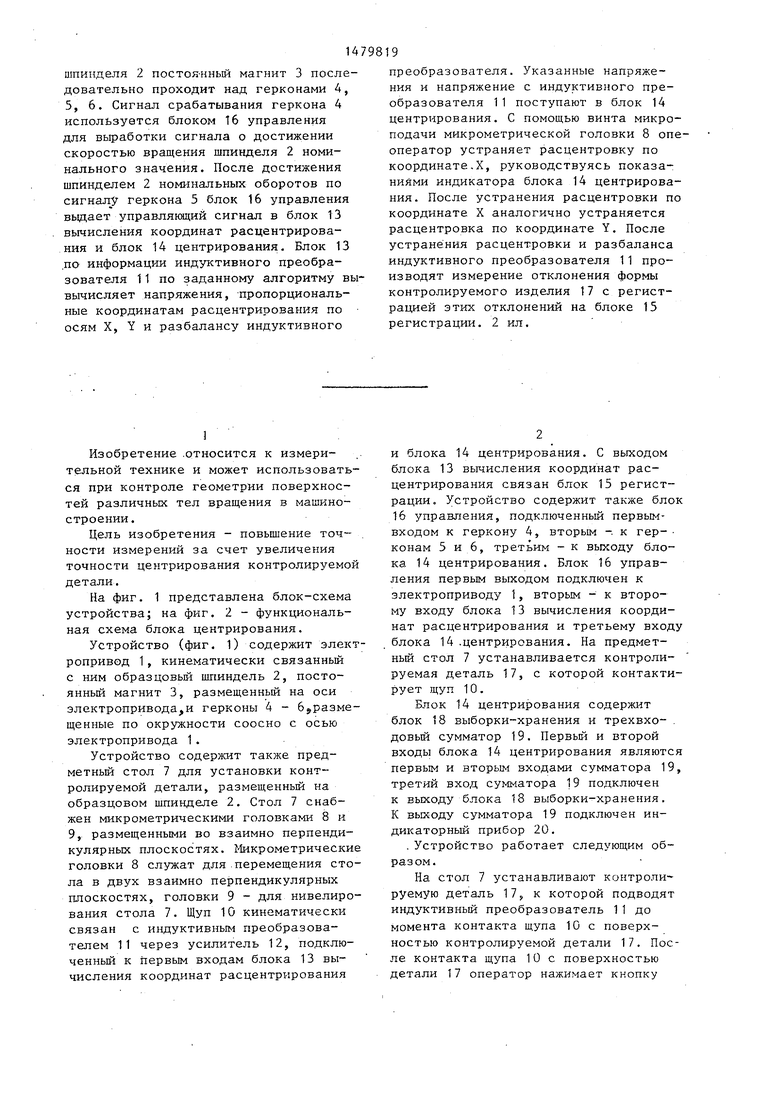
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля профиля деталей,имеющих в сечении незамкнутую дугу окружности | 1980 |
|
SU926517A1 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Устройство для автоматического определения положения и центровки оптического волокна в наконечниках соединителя | 1989 |
|
SU1804591A3 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение точности измерений за счет увеличения точности центрирования контролируемой детали. На предметный стол 7 устанавливают контролируемую деталь 17, к которой подводят индуктивный преобразователь 11 до момента касания щупа 10 с деталью. По сигналу блока 16 управления включают электропривод 1. При вращении шпинделя 2 постоянный магнит 3 последовательно проходит над герконами 4, 5, 6. Сигнал срабатывания геркона 4 используется блоком 16 управления для выработки сигнала о достижении скоростью вращения шпинделя 2 номинального значения. После достижения шпинделем 2 номинальных оборотов по сигналу геркона 5 блок 16 управления выдает управляющий сигнал в блок 13 вычисления координат расцентрирования и блок 14 центрирования. Блок 13 по информации индуктивного преобразователя 11 по заданному алгоритму вычисляет напряжения, пропорциональные координатам расцентрирования по осям X, Y и разбалансу индуктивного преобразователя. Указанные напряжения и напряжение с индуктивного преобразователя 11 поступают в блок 14 центрирования. С помощью винта микроподачи микрометрической головки 8 оператор устраняет расцентровку по координате X, руководствуясь показаниями индикатора блока 14 центрирования. После устранения расцентровки по координате X аналогично устраняется расцентровка по координате Y. После устранения расцентровки и разбаланса индуктивного преобразователя 11 производят измерение отклонения формы контролируемого изделия 17 с регистрацией этих отклонений на блоке 15 регистрации. 2 ил.
фиг/
X
14
шпинделя 2 постоянный магнит 3 последовательно проходит над герконами 4, 5, 6. Сигнал срабатывания геркона 4 используется блоком 16 управления для выработки сигнала о достижении скоростью вращения шпинделя 2 номинального значения. После достижения шпинделем 2 номинальных оборотов по сигналу геркона 5 блок 16 управления выдает управляющий сигнал в блок 13 вычисления координат расцентрирова- ния и блок 14 центрирования. Блок 13 по информации индуктивного преобразователя 11 по заданному алгоритму вы- вычисляет напряжения, пропорциональные координатам расцентрирования по осям X, Y и разбалансу индуктивного
Изобретение относится к измерительной технике и может использоваться при контроле геометрии поверхностей различных тел вращения в машиностроении.
Цель изобретения - повышение точности измерений за счет увеличения точности центрирования контролируемой детали.
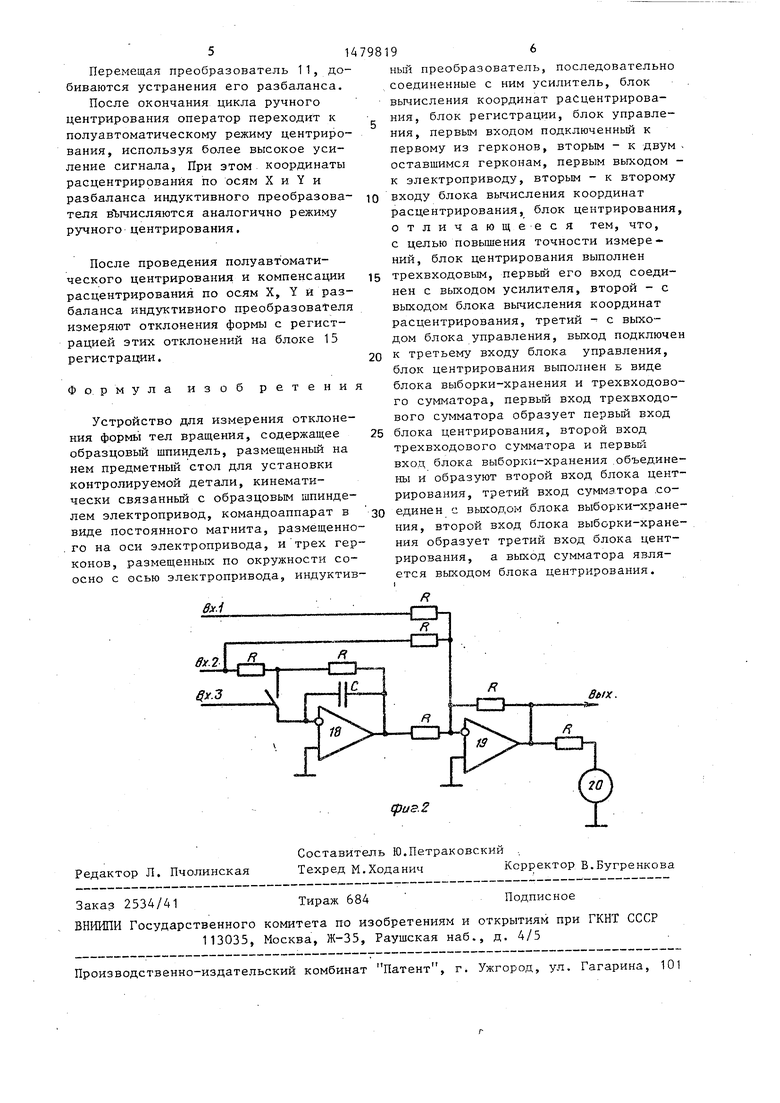
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - функциональная схема блока центрирования.
Устройство (фиг. 1) содержит электропривод 1, кинематически связанный с ним образцовый шпиндель 2, постоянный магнит 3, размещенный на оси электропривода герконы 4 - 69разме- щенные по окружности соосно с осью электропривода 1.
Устройство содержит также предметный стол 7 для установки контролируемой детали, размещенный на образцовом шпинделе 2. Стол 7 снабжен микрометрическими головками 8 и 9, размещенными во взаимно перпендикулярных плоскостях. Микрометрические головки 8 служат для перемещения стола в двух взаимно перпендикулярных плоскостях, головки 9 - для нивелирования стола 7. Щуп 10 кинематически связан с индуктивным преобразователем 11 через усилитель 12, подключенный к первым входам блока 13 вычисления координат расцентркрования
9819
преобразователя. Указанные напряжения и напряжение с индуктивного преобразователя 11 поступают в блок 14 центрирования. С помощью винта микроподачи микрометрической головки 8 опе- оператор устраняет расцентровку по координате.X, руководствуясь показаниями индикатора блока 14 центрирования. После устранения расцентровки по координате X аналогично устраняется расцентровка по координате Y. После устранения расцентровки и разбаланса индуктивного преобразователя 11 производят измерение отклонения формы контролируемого изделия 17 с регистрацией этих отклонений на блоке 15 регистрации. 2 ил.
и блока 14 центрирования. С выходом блока 13 вычисления координат расцентрирования связан блок 15 регистрации. Устройство содержит также блок 16 управления, подключенный первым- входом к геркону 4, вторым - к гер- конам 5 и 6, третьим - к выходу блока 14 центрирования. Блок 16 управления первым выходом подключен к электроприводу 1, вторым - к второму входу блока 13 вычисления координат расцентрирования и третьему входу блока 14 .центрирования. На предметный стол 7 устанавливается контролируемая деталь 17, с которой контактирует щуп 10.
Блок 14 центрирования содержит блок 18 выборки-хранения и трехвхо- довый сумматор 19. Первый и второй входы блока 14 центрирования являются первым и вторым входами сумматора 19, третий вход сумматора 19 подключен к выходу блока 18 выборки-хранения. К выходу сумматора 19 подключен индикаторный прибор 20.
. Устройство работает следующим образом.
На стол 7 устанавливают контролируемую деталь 17, к которой подводят индуктивный преобразователь 11 до момента контакта щупа 10 с поверхностью контролируемой детали 17. После контакта щупа 10 с поверхностью детали 17 оператор нажимает кнопку
J14
Пуск (не показана) блока 16 управления. При этом на электропривод 1 образцового шпинделя 2 подается нэп ряжение, шпиндель начинает вращаться
Устройство работает в двух режимах: ручного и полуавтоматического центрирования.
При ручном центрировании на блоке 16 управление нажимается кнопка Ре- жим (не показана). В процессе вращения шпинделя 2 постоянный магни 3 последовательно проходит над гер- конами 4-6, вызывая их срабатывание. Герконы 5 и 6 установлены во в взаимно перпендикулярных плоскостях по осям X и Y. Постоянный магнит 3 и герконы 4-6 образуют командоаппа- рат, осуществляющий привязку положения шпинделя в пространстве по отно- шению к щупу 10 индуктивного преобразователя 11.
Сигнал срабатывания геркона 4 используется блоком 16 управления для выработки сигнала о достижении ско- ростью вращения шпинделя 2 номинального значения.
После того, как шпиндель наберет номинальные обороты, блок 16 управления по сигналу срабатывания герко- на 5 выдает управляющий сигнал на входы блока 13 вычисления координат расцентрирования и блока 14 центрирования. Блок 13 вычисления координат расцентрирования в течение оборо та по информации, поступающей от индуктивного преобразователя 11, в соответствии с заданным алгоритмом вычисляет напряжения Ux, U и ив, пропорциональные координатам расцент- рирования по осям X и Y и разбалансу индуктивного преобразователя.
Напряжение U х поступает на первый вход блока 14 центрирования. На второй вход блока 14 центрирования пос- тупает напряжение U npeesp. с индуктивного преобразователя 11, которое представляет собой сумму трех напряжений:
Unpeo&p. Ux+
Uf
U Fx - напряжение, пропорциональное отклонению от круглос- ти по оси Xjее
U R - напряжение, пропорциональ-- ное отклонению преобразователя от сбалансированногг положения.
JQ $ 20
25
30 35 40
5
0
194
В момент повторного прохождения магнита 3 над герконом 5 блок 16 управления выдает сигнал на остановку электропривода 1 и сигнал в блок 14 1 центрирования. Под действием этого сигнала блок 18 выборки-хранения (фиг. 2) переходит в режим хранения, при этом сигнал на его выходе равен инверсному значению U npcosp.
Таким образом, сигнал на выходе трехвходового сумматора 19 равен величине Uv. Вращая винт микроподачи микрометрической головки 8 по координате X, оператор подводит стрелку индикаторного прибора 20 к нулевой риске шкалы. Нулевое показание индикаторного прибора соответствует моменту, когда первый член суммы (Uv+ + UFX + UR), поступающей на один из входов сумматора 19, равен 0, т.е. расцентрирование детали по координате X устранено. При этом прецизионным первичным преобразователем перемещения стола и центрируемой детали в электрический сигнал является сам индуктивный преобразователь 11.
Нулевое напряжение на выходе сумматора 19 блока 14 центрирования поступает на вход блока 16 управления, при этом вновь включается электропривод 1 и поворачивает шпиндель 2 на 90е до срабатывания геркона 6.
i
Аналогично с помощью микрометрической головки 8 устраняется расцентрирование по координате Y. После устранения расцентровки по координате Y индикаторный прибор 20 устанавливается в нулевое положение, что приводит к очередному такту срабатывания блока 16 управления. Сигнал с выхода блока 16 управления переводит блок 18 выборки-хранения блока центрирования последовательно в режимы выборки и хранения.
При этом сигнал на выходе блока 18 выборки-хранения становится равным - (U Fvj+ UR), поскольку расцент- ровка по оси Y устранена.
Сумматор 19 суммирует напряжения
UFV+UR
()
U V R
При этом индикаторный прибор 20 индицирует напряжение, пропорциональное отклонению индуктивного преобразователя 11 от сбалансированного положения.
51
Перемещая преобразователь 11, добиваются устранения его разбаланса.
После окончания цикла ручного центрирования оператор переходит к полуавтоматическому режиму центрирования, используя более высокое усиление сигнала, При этом координаты расцентрирования по осям X и Y и разбаланса индуктивного преобразова- теля зачисляются аналогично режиму ручного центрирования.
После проведения полуавтоматического центрирования и компенсации расцентрирования по осям X, Y и разбаланса индуктивного преобразователя измеряют отклонения формы с регистрацией этих отклонений на блоке 15 регистрации.
Формула изоб ретения
Устройство для измерения отклонения формы тел вращения, содержащее образцовый шпиндель, размещенный на нем предметный стол для установки контролируемой детали, кинематически связанный с образцовым шпинделем электропривод, командоаппарат в виде постоянного магнита, размещенного на оси электропривода, и трех rep- конов, размещенных по окружности со- осно с осью электропривода, индуктивРедактор Л. Пчолинская
Составитель Ю.Петраковский
Техред М.ХоданичКорректор Б.Бугренкова
Заказ 2534/41
Тираж 684
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
5
0
5
0
196
ный преобразователь, последовательно соединенные с ним усилитель, блок вычисления координат расцентрирования, блок регистрации, блок управления, первым входом подключенный к первому из герконов, вторым - к двум - оставшимся герконам, первым выходом - к электроприводу, вторым - к второму входу блока вычисления координат расцентрирования, блок центрирования, отличающееся тем, что, с целью повышения точности измерений, блок центрирования выполнен трехвходовым, первый его вход соединен с выходом усилителя, второй - с выходом блока вычисления координат расцентрирования, третий - с выходом блока управления, выход подключен к третьему входу блока управления, блок центрирования выполнен ь виде блока выборки-хранения и трехвходово- го сумматора, первый вход трехвходо- вого сумматора образует первый вход блока центрирования, второй вход трехвходового сумматора и первый вхоц блока выборки-хранения объединены и образуют второй вход блока центрирования, третий вход сумматора соединен с выходом блока выборки-хранения, второй вход блока выборки-хранения образует третий вход блока центрирования,
а выход сумматора является выходом блока центрирования.
/
-а
Вых.
фиг. 2
Подписное
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННО СЛОЖНЫХ | 0 |
|
SU380949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чудов В.А., Цидулко Ф.В., Фрейд- гейм Н.И | |||
| Размерный контроль в машиностроении.-М | |||
| : Машиностроение, 1982, с | |||
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
