(54) УСТРОЙСТВО ДЛЯ АБРАЗИВОСТРУЙНОЙ ОБРАБОТКИ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ ЦИЛИНДРИЧЕСКИХ СОСУДОВИзобретение относится к обработке деталей свободным абразивом. Известны устройства для абразйвоструйной обработки внутренних поверхностей цилиндрических сосудов, содержа. щие средство для поддержания и перемещения обрабатываемого изделия, штангу с установленным на ней рабочим органом и приводы перемещения штанги рабочего органа И. Недостаток известного устройства зак лючается в недостаточно эффективной обработке деталей. Цель изобретения - повышение эффективности обработки путем обеспечения возможности перемещения штанги по си.нусоидальному закону. Указанная цель достигается за счет того, что устройство снабжено размещенной на штанге с шестерней, кинематически связанной с введенным в устройство кривошипно-кулисным механизмом, ку лиса которого выполнена в виде рейки и установлена с возможностью поступательного перемещения. На фиг. 1 схематично изображено устройство, общий вид на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - схема передвижения рабочего органа. Предлагаемое устройство состоит из стойки 1, на направляющих 2 которой установлена штанга 3, несущая рабочий орган 4, Мотор-индуктор 5 манипулятора имеете ведущий вал 6, от которого разветвляются две кинематические цепи: одна на передвижение штанги 3, другая на вращение рабочего органа 4. Для передвижения штанги 3 служит кривощип 7, сопряженный посредством подшипника 8 с пазом коромысла 9, которое прикреплено к кулисе 10. Кулиса 10 выполнена в виде рейки, установленной на подшипниках 11, С рейкой-кулисой ip зацепляется зубчатое колесо 12, которое через вал 13 и шестерню 14 соединено с рейкой 15, прикрепленной к штанге 3, Вращение рабочего органа 4 осуществляется по другой кинемагической цепи через коническую аубчатую пару 16, вал 17, коническую зубчатую пару 18, ходовой валик 19, гитару 20 шестерен, вал 21 и коническую зубчатую пару 22. Рабочий орган 4 предназначен для перемещения струйного аппарата, например, дробеструйного сопла (не показано), по эквидистантной кривой к обрабатываемой внутренней поверхности цилиндрического корпуса 23 с эллиптическими днищами. Длина рабочего органа 4 равна большей полуоси эллипса, эквидистантного днищу, ,по траектории которого перемещается струйный аппарат при обработке днищ. Ра диус кривощипа 7 равен разности большой и малой полуоси эквидистантного эллипса, деленной на передаточное число механической передачи от кулисы 10 к штанге 3. Передаточное число механической передачи от ведущего вала 6 до рабочего органа 4 равно единице, что дает возможность вращаться им синхронно. Обрабатываемый корпус 23 установлен на роликовом стенде 24 тележки 25, передвижение которой осуществляется от привода 26 посредством гибкой связи 27 переброшенной через приводной 28 и натяжной 29 ролики. Схема передвижения рабочего органа 4 относительно обрабатываемой поверхности корпуса 23 показана на фиг. 3 (поло жение а, в, с, а , е, , qj , 1i ). Работает устройство следующим образом . Рабочий орган 4 и кривошип 7 разворачивают вдоль оси штанги 3. На роликовый стенд 24 тележки 25, которая находится вне зоны действия манипулятора, укладывают корпус 23 и посредством при вода 26 через ролики 28 vi 29 гибкой связью 27 перемещают тележку вправо. При этом штанга 3 с рабочим органом 4 входит через люк в полость обрабатываемого корпуса 23. Тележка 25 останавли вается в таком положении, которое обесп чивает оптимальное расстояние от струйн
аппарата, укрепленного на рабочем органе 4, до обрабатываемой поверхности глухого эллиптического.днйша. Затем приводят во вращение обрабатываемый корпус. 23 с помощью роликового стенда 24 и включают мотор-редуктор 5 манипулятора, который через ведущий вал 6, коническую зубчатую пару 16, вал 17 коническую пару 18, ходовой валик 19, гитару 20 шестерен, вал 21 и коническую зубчатую пару 22 поворачивает рабочий орган 4 по часовой стрелке от О до 9 О
ремещается вне зоны действия рабочего органа 4 манипулятор, тележка 25 останавливается. На этом рабочий цикл за- 50 канчивается.
Предлагаемое устройство позволяет повысить эффективность обработки путем обеспечения возможности перемещения щтанги по сищсоидальному закону.
55
Формула изобретения
Устройство для абразивоструйной обработки внутренних поверхностей цилиндриче( с положения а в положение с1 ). При этом кривошип 7 также поворачивается от горизонтального положения в вертикальное на 90 по часовой стрелке и через подшипник 8, сочлененный с пазом коромысла 9 через кулису-рейку 10, установленную в подщипниках 11, зубчатое колесо 12, вал 13, шестерню 14 и рейку 15 перемешают штангу 3 влево по синусоидальному закону. Штанга 3 проходит за равные промежутки времени все увеличивающиеся отрезки ato, Ъо, с с. Сложение двух движений (равномерного вращательного рабочего органа 4 и синусоидального перемещения штанги 3) приводит к тому, что конец рабочего органа 4, на котором закреплен струйный аппарат, описывает эллипс, эквидистантный глухому днищу,обеспечивая оптимальные условия обработки. После поворота рабочего органа 4 на 90 (до положения Э ) мотор-редуктор 5 отключается и включается привод 26 на перемещение тележки 25 влево. Рабочий орган 4 при этом перемещается вдоль оси обрабатываемого корпуса 23 из положения сЗ в положение е . При достижении органом 4 переднего днища (днища с люком) тележка 25 останавливается и включается моторредуктор 5 манипулятора, который поворачивает орган 4 по часовой стрелке от 9О до 180 (из положения е в положение ), При этом за равные промежутки времени штанга 3 проходит влево все уменьшающиеся отрезки ef , 0, Qfli по синусоидальному закону. Сложение этих двух движений приводит к тому, что конец рабочего органа 4 со струйным ап- паратом проходит по эквидистантной кривой (эллипсу) к переднему дн.ищу корпуса 23. После достижения рабочим органом 4 положения 1i струйная обработка внутренней поверхности корпуса 23 заканчивается. Мотор-редуктор 5 останавливается, включается привод 26, который перемешает тележку 25 влево. После того, как корпус 23 сходит со штанги 3 и песких сосудов, содержащее средство для поддержания и перемещения обрабатывав мого изделия, штангу с установленным на ней рабочим органом, и приводом перемещения штанги к рабочего органа, о т л ичаюшееся тем, что, с целью повышения эффективности обработки путем обеспечения возможности перемещения штанги по синусоидальному закону, устройство снабжено размещенной по штанге рейкой
с шестерней, кинематически связанной с введенным в устройство кривошипно-кулисным механизмом, кулиса которого выполнена в виде рейки и установлена в возможности поступательного перемещения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 234096, ioi. В 24 С 3/16, 1966.
ВидА

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1316813A1 |
| Манипулятор | 1982 |
|
SU1077782A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Манипулятор | 1980 |
|
SU942982A1 |
| Манипулятор | 1979 |
|
SU918082A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| КАМЕРА ДЛЯ РАЗДЕЛКИ ДВУХПУЧКОВЫХ ТОПЛИВНЫХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1990 |
|
SU1819479A3 |
| ВИБРОБЕТОНОУКЛАДЧИК | 2005 |
|
RU2304509C2 |
| Привод рабочего органа манипулятора | 1987 |
|
SU1491696A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ МАТЕРИАЛА НА ВЫШИВАЛЬНОЙ МАШИНЕ | 1972 |
|
SU328237A1 |

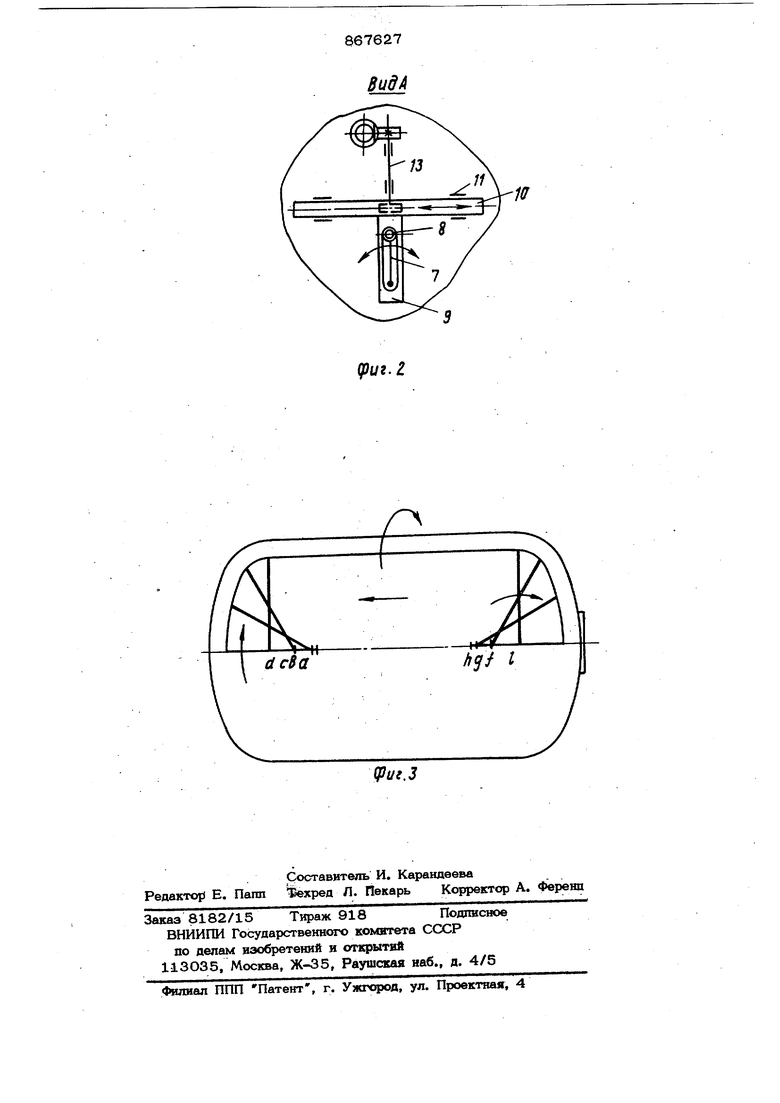
(риг. г
