(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ СЛЕДЯШГ-ГО ПРИВОЛЛ
всей линейной зоны характеристики привода.
Предложенное устройство отличается от известного тем, что в него введены формирователи сигналов, пропорциональных постоянной и переменной составляющим заданной скорости, формирователь опорного сигнала, пропорционального постоянной составляющей заданной скорости и второй сумматор, входы которого подключены к выходам формирователя сигнала,пропорционального переменной составляющей заданной скорости и первого сумматора, второй вход которого соединен с выходом формирователя сигнала/ пропорционального постоянной составляющей заданной скорости, а формирватель опорного сигнала, пропорциональ кого постоянной составляющей заданной скорости,с6.еди)нен с двигателем.
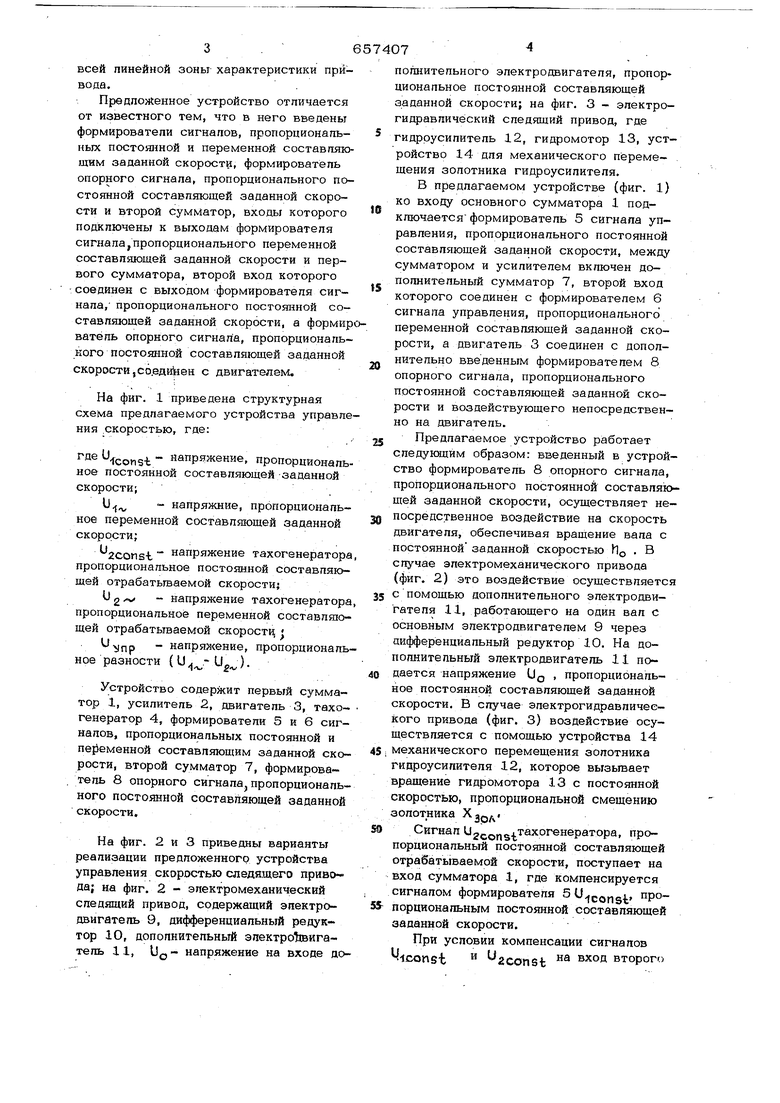
На фиг. 1 приведена структурная схема предлагаемого устройства управления .скоростью, где:
iconsi - напряжение, пропорциональное постоянной составляющей заданной скорости;
U - напряжние, пропорциональное переменной составляющей заданной скорости;
aconst напряжение тахогзнератора пропорциональное постоянной составляющей отрабатываемой скорости;
U
- напряжение тахогенератора
пропорциональное переменной составляющей отрабатываемой скоростц
пр напряжение, пропорциональное разности ().
Устройство содержит первый сумматор 1, усилитель 2, двигатель 3, тахогенератор 4, формирователи 5 и 6 сигналов, пропорциональных постоянной и переменной составляющим заданной скорости, второй сумматор 7, формирова те ль 8 опорного сигнала, пропорционального постоянной составляющей заданной скорости.
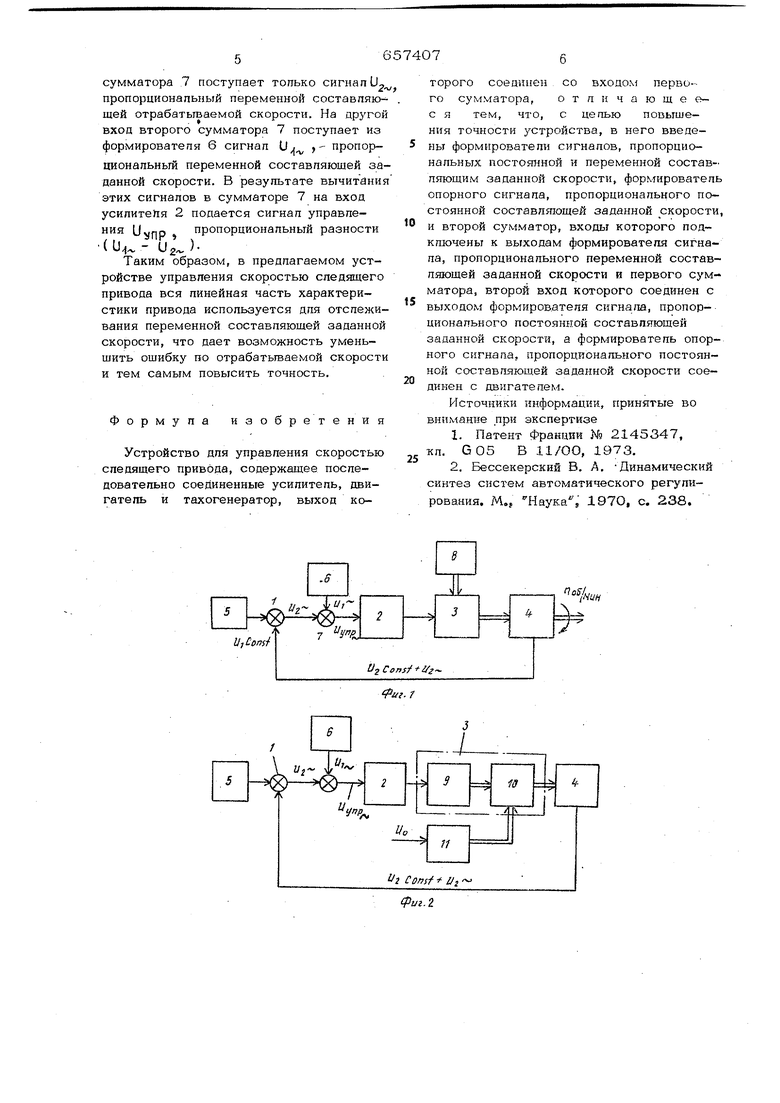
На фиг. 2 и 3 приведны варианты реализации предложенного устройства управления скоростью следящего привода; на фиг. 2 - электромеханический следящий привод, содержащий эпектропвигатепь 9, дифференциальный редуктор 10, дополнительный эпектро юигатель И, DO - напряжение на входе допогшительного электродвигателя, пропорциональное постоянной составляющей заданной скорости; на фиг. 3 - электро- гидравлический следящий привод, где гидроусилитель 12, гидромотор 13, устройство 14 для механического перемещения золотника гидроусилителя.
В предлагаемом устройстве (фиг. 1) ко входу основного сумматора 1 подключается формирователь 5 сигнала управления, пропорционального постоянной составляющей заданной скорости, между сумматором и усилителем включен дополнительный сумматор 7, второй вход которого соединен с формирователем б сигнала управления, пропорционального переменной составляющей заданной скорости, а двигатель 3 соединен с дополнительно введенным формирователем 8 опорного сигнала, пропорционального постоянной составляющей заданной скорости и воздействующего непосредственно на двигатель.
Предлагаемое устройство работает спедукмцим образом: введенный в устройство формирователь 8 опорного сигнала, пропорционального постоянной составля Ощей заданной скорости, осуществляет нед посредственное воздействие на скорость двигателя, обеспечивая вращение вала с постоянной заданной скоростью Ид . В случае электромеханического привода (фиг. 2) это воздействие осуществляется 35 с помощью дополнительного электродвигателя 11, работающего на один вал с основным электродвигателем 9 через дифференциальный редуктор 10. На дополнительный электродвигатель 11 поо дается напряжение UQ , пропорциональное постоянной составляющей заданной скорости. В случае электрогидравличеекого привода (фиг. 3) воздействие осуществляется с помощью устройства 14 5 i механического перемещения золотника гидроусилителя 12, которое выаьтает вращение гидромотора 13 с постоянной скоростью, пропорциональной смещению золотника .
59 Сигнал Ugj Qng+TaxoreHepaTopa, пропорциональный постоянной составляющей отрабатываемой скорости, поступает на вход сумматора 1, где компенсируется сигналом формирователя , про55- порционапьным постоянной составляющей заданной скорости.
При условии компенсации сигналов Miconst aconst второго сумматора 7 поступает тоггько сигнал (J пропорционапьный переменной составляющей отрабатываемой скорости. На другой вход второго сумматора 7 поступает из формирователя 6 сигнал U/ - пропорциональный переменной составляющей заданной скорости. В результате вычитания этих сигналов в сумматоре 7 на вход усилитеПя 2 подается сигнал управления Uvnp пропорциональный разности ( и2 }Таким образом, в предлагаемом устройстве управления скоростью следящего привода вся линейная часть характеристики привода используется для отслеживания переменной составляющей заданной скорости, что дает возможность уменьшить ошибку по отрабатьгааемой скорости и тем самым повысить точность. Формула изобретения Устройство для управления скоростью следящего привода, содержащее последовательно соединенные усилитель, двигатель и тахогенератор, выход .
ti Consf- i/zсо входо 1 первоторого соединен отпн чающее- го сумматора, с я тем, что. с цепью повышения точности устройства, в него введены формирователи сигналов, пропорциональных постоянной и переменной составляющим заданной скорости, формирователь опорного сигнала, пропорционального постоянной составляющей заданной скорости, и второй сумматор, входы которого подключены к выходам формирователя сигнала, пропорционального переменной составляющей заданной скорости и первого сумматора, второй вход которого соединен с выходом формирователя сигна/ia, пропорционального постоянной составляющей заданной скорости, а формирователь опорного снгнапа, пропорционального постоянной составпяюш.ей заданной скорости соединен с двигателем. Источники информации, принятые во внимание при экспертизе 1.Патент Франции № 2145347, кл. G05 В 11/ОО, 1973. 2.Бессекерский В. А. -Динамический синтез систем автоматического регулирования. М,, HayKa j 197О, с. 238.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU840798A1 |
| Электрогидравлическая следящая система | 1976 |
|
SU632831A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| ЭЛЕКТРОГИДРЛВЯИЧЕСКЛЯ СЛЕДЯЩАЯ СИСТЕМА | 1976 |
|
SU826100A1 |
| Устройство для стабилизации на заданной глубине опущенных на тросе объектов | 1975 |
|
SU537889A2 |
| Устройство для управления манипулятором | 1980 |
|
SU885968A1 |
| Регулятор торможения подвижной поперечины гидравлического пресса | 1976 |
|
SU648446A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Следящая система | 1987 |
|
SU1439529A1 |
| СТЕНД С БЕГОВЫМИ БАРАБАНАМИ ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1971 |
|
SU312170A1 |
.. , ..
,; i
г ,., ч ™)
Z/, Canif
